1.本发明涉及测试技术领域,具体涉及一种网络化伺服驱动器和电动机构测试系统和方法。
背景技术:
2.伺服驱动器出厂验收时都需要进行功能、性能等测试,以满足产品规范的要求,需要使用专用的伺服驱动器测试系统,目前的伺服驱动器的检测设备多为手动,测试效率低,对伺服驱动器的批量生产形成制约。与此同时,电动机构鉴定时都需要进行上万次的寿命可靠性测试,以满足产品规范的要求,目前的电动机构测试设备多为手动操作,上万次的功能测试寿命试验需要消耗大量的人力和时间。
技术实现要素:
3.本发明的目的在于提供一种网络化伺服驱动器和电动机构测试系统和方法,所述系统和方法采用网络化测试伺服驱动器和电动机构,减少了对测试设备资源的需求;同时通过上位机一键自动测试减少了人为操作,降低了人力成本,提高了测试效率。
4.为达到上述目的,本发明采用下述技术方案:
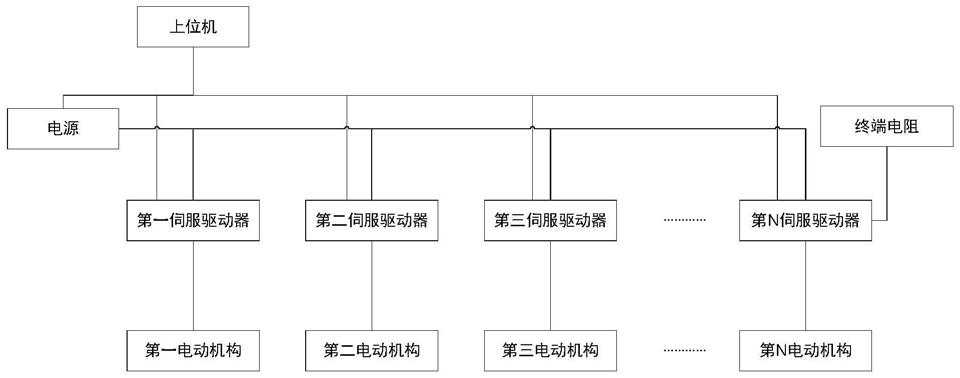
5.本发明一方面提供一种网络化伺服驱动器和电动机构测试系统,所述系统包括:
6.上位机、电源、第一到第n伺服驱动器、第一到第n电动机构、电缆和终端电阻;
7.其中,
8.所述上位机通过can总线电缆分别与所述第一到第n伺服驱动器的第一端及所述电源的控制端相连;
9.所述电源的输出端通过所述电缆分别与所述第一到第n伺服驱动器的第二端相连;
10.第n伺服驱动器的第三端通过所述电缆与第n电动机构相连;
11.所述第n伺服驱动器的第四端通过所述电缆与所述终端电阻相连;
12.其中,n为can网络允许的最大连接设备数量,1≤n≤n且n为整数。
13.在一个具体实施例中,所述上位机用于控制所述电源的输出;与所述第一到第n伺服驱动器进行通信,实时显示伺服驱动器反馈的信息,并通过控制所述第一到第n伺服驱动器进而控制与所述第一到第n伺服驱动器相连的第一到第n电动机构的运动;对所述伺服驱动器反馈的信息进行处理分析得到测试结果;
14.其中,所述上位机安装有控制软件。
15.在一个具体实施例中,所述上位机根据预设在所述控制软件上的伺服驱动器的编号和伺服驱动器测试顺序对所述伺服驱动器进行测试;并能根据预设在所述控制软件上的伺服驱动器的编号、电动机构测试顺序以及第n电动机构的测试次数和每次测试间隔时间驱动所述电动机构进行测试。
16.在一个具体实施例中,所述伺服驱动器反馈的信息包括:伺服驱动器的输出电流、
输入电压和与该伺服驱动器相连的电动机构的电流、电压、功率、状态以及该电动机构中电机的运行转矩和运行速度;
17.所述伺服驱动器反馈的信息还包括在测试过程中出现故障时伺服驱动器产生的报警信号。
18.在一个具体实施例中,所述第n电动机构用于响应和该第n电动机构相连的第n伺服驱动器的控制,并将到达运动限位后生成的到位信号反馈给所述第n伺服驱动器;
19.其中,所述到位信号包括:第一到位信号和第二到位信号。
20.在一个具体实施例中,所述第n伺服驱动器通过与所述上位机进行通信响应上位机的控制并控制和所述第n伺服驱动器相连的第n电动机构进行运动,并实时反馈信息给所述上位机;接收到第n电动机构反馈的到位信号后控制所述第n电动机构停止运动。
21.在一个具体实施例中,所述电源响应上位机的控制,用于给所述第一到第n伺服驱动器供电;
22.所述电缆用于电力传输和通信;
23.所述终端电阻用于吸收信号反射及回波。
24.本发明另一方面提供一种根据上述的系统进行测试的方法,所述方法包括:
25.s101:按下上位机控制软件上的伺服驱动器测试按键后上位机开始根据预设的伺服驱动器的编号和伺服驱动器测试顺序对伺服驱动器进行测试;
26.s103:第n伺服驱动器控制第n电动机构进行伸出运动,第n电动机构伸出到伸出限位后生成第一到位信号,并将该第一到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第一到位信号后控制所述第n电动机构停止伸出,并与上位机进行通信将第n电动机构的状态反馈给上位机,在上位机显示第n电动机构伸出到位;
27.s105:第n伺服驱动器控制第n电动机构进行缩回运动,第n电动机构缩回到缩回限位后生成第二到位信号,并将该第二到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第二到位信号后控制所述第n电动机构停止缩回,并与上位机进行通信将第n电动机构的状态反馈给上位机,在上位机显示第n电动机构缩回到位;
28.s107:上位机对所述第n伺服驱动器反馈的信息进行处理分析得到第n伺服驱动器的测试结果;
29.其中,
30.在对第n伺服驱动器进行测试的过程中,所述第n伺服驱动器实时将第n伺服驱动器的输出电流、输入电压和所述第n电动机构的电流、电压、功率、状态以及所述第n电动机构中电机的运行转矩和运行速度反馈给上位机,上位机实时显示第n伺服驱动器反馈的信息;
31.若在对第n伺服驱动器进行测试的过程中出现故障,所述第n伺服驱动器则产生报警信号,并将所述报警信号反馈给上位机,上位机实时显示该报警信号并停止测试;
32.其中,n为can网络允许的最大连接设备数量,1≤n≤n且n为整数。
33.在一个具体实施例中,所述方法还包括:
34.s109:完成对伺服驱动器的测试后,将所有伺服驱动器更换为正常的伺服驱动器,并将第一到第n电动机构更换为第一到第n待测电动机构;
35.s111:按下上位机控制软件上的电动机构测试按键后上位机开始根据预设的伺服
驱动器的编号、电动机构测试顺序以及第n电动机构的测试次数m和每次测试间隔时间t,驱动所述待测电动机构进行测试;
36.s113:第n伺服驱动器控制第n待测电动机构进行伸出运动,第n待测电动机构伸出到伸出限位后生成第一到位信号,并将该第一到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第一到位信号后控制所述第n待测电动机构停止伸出,并与上位机进行通信将第n待测电动机构的状态反馈给上位机,在上位机显示第n待测电动机构伸出到位;之后第n伺服驱动器控制第n待测电动机构进行缩回运动,第n待测电动机构缩回到缩回限位后生成第二到位信号,并将该第二到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第二到位信号后控制所述第n待测电动机构停止缩回,并与上位机进行通信将第n待测电动机构的状态反馈给上位机,在上位机显示第n待测电动机构缩回到位;其中,第n待测电动机构完成一次伸出运动和一次缩回运动为完成一次测试;
37.s115:间隔时间t后重复步骤s113,直至完成m次测试后执行步骤s117;
38.s117:上位机将第n伺服驱动器反馈的信息进行作图处理,并通过数据比较分析得到在整个测试期间第n待测电动机构的运行状态和各项数据的变化趋势;
39.其中,
40.在对第n待测电动机构进行测试的过程中,所述第n伺服驱动器实时将第n待测电动机构的电流、电压、功率、状态以及所述第n待测电动机构中电机的运行转矩和运行速度反馈给上位机,上位机实时显示第n伺服驱动器反馈的信息;
41.若在对第n待测电动机构进行测试的过程中出现故障,第n伺服驱动器则产生报警信号,并将所述报警信号反馈给上位机,上位机实时显示该报警信号并停止测试;
42.其中,m为大于等于1的自然数;t大于0秒。
43.本发明的有益效果如下:
44.本发明所提供的一种网络化伺服驱动器和电动机构测试系统和方法采用网络化测试伺服驱动器和电动机构,减少了对测试设备资源的需求;同时通过上位机一键自动测试减少了人为操作,降低了人力成本,提高了测试效率。
附图说明
45.为了更清楚地说明本技术具体实施方式或现有的技术方案,下面将对具体实施方式或现有的技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图是本技术的一种实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
46.图1示出根据本发明一个实施例的一种网络化伺服驱动器和电动机构测试系统的组成结构框图。
47.图2示出根据本发明一个实施例的一种网络化伺服驱动器和电动机构测试方法流程图。
具体实施方式
48.为了使本发明的技术方案更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。以下通过具体实施例对本发明进行了详细的说明,但这些并非构成对本
发明的限制。在不脱离本发明原理的情况下,本领域的技术人员可以做出变形与改进,也应视为本发明的保护范围。
49.本实施例一方面提供一种网络化伺服驱动器和电动机构测试系统,如图1所示,所述系统包括:
50.上位机、电源、第一到第n伺服驱动器、第一到第n电动机构、电缆和终端电阻;
51.其中,
52.所述上位机通过can(controller area network,控制器局域网络)总线电缆分别与所述第一到第n伺服驱动器的第一端及所述电源的控制端相连;
53.所述电源的输出端通过所述电缆分别与所述第一到第n伺服驱动器的第二端相连;
54.第n伺服驱动器的第三端通过所述电缆与第n电动机构相连;
55.所述第n伺服驱动器的第四端通过所述电缆与所述终端电阻相连;
56.其中,n为can网络允许的最大连接设备数量,1≤n≤n且n为整数。
57.其中,
58.所述上位机用于控制所述电源的输出;与所述第一到第n伺服驱动器进行通信,实时显示伺服驱动器反馈的信息,并通过控制所述第一到第n伺服驱动器进而控制与所述第一到第n伺服驱动器相连的第一到第n电动机构的运动;对所述伺服驱动器反馈的信息进行处理分析得到测试结果;
59.其中,所述上位机安装有控制软件,上位机通过所述控制软件完成测试和对数据的处理分析。
60.所述伺服驱动器反馈的信息包括:伺服驱动器的输出电流、输入电压和与该伺服驱动器相连的电动机构的电流、电压、功率、状态以及该电动机构中电机的运行转矩和运行速度;
61.所述伺服驱动器反馈的信息还包括在测试过程中出现故障,例如过流或过压时伺服驱动器产生的报警信号。
62.所述上位机根据预设在所述控制软件上的伺服驱动器的编号和伺服驱动器测试顺序对所述伺服驱动器进行测试;并能根据预设在所述控制软件上的伺服驱动器的编号、电动机构测试顺序以及第n电动机构的测试次数和每次测试间隔时间驱动所述电动机构进行测试。
63.其中,电动机构与伺服驱动器一一对应,因此电动机构与伺服驱动器的编号是对应相同的;例如所述第一伺服驱动器的编号即为1,上位机驱动编号为1的伺服驱动器即可间接驱动第一电动机构进行测试。
64.所述第n电动机构用于响应和该第n电动机构相连的第n伺服驱动器的控制,并将到达运动限位后生成的到位信号反馈给所述第n伺服驱动器;
65.其中,所述到位信号包括:第一到位信号和第二到位信号。
66.所述第n伺服驱动器通过与所述上位机进行通信响应上位机的控制并控制和所述第n伺服驱动器相连的第n电动机构进行运动,并实时反馈信息给所述上位机;接收到第n电动机构反馈的到位信号后控制所述第n电动机构停止运动。
67.所述电源为程控电源,响应上位机的控制,用于给所述第一到第n伺服驱动器供
电;
68.所述电缆用于电力传输和通信;
69.所述终端电阻用于吸收信号反射及回波,提高抗干扰能力,提高信号质量。
70.本实施例另一方面提供一种利用上述系统进行测试的方法,如图2所示,所述方法包括对伺服驱动器进行测试和对电动机构进行测试。
71.对伺服驱动器进行测试包括:
72.s101:按下上位机控制软件上的伺服驱动器测试按键后上位机开始根据预设的伺服驱动器的编号和伺服驱动器测试顺序对伺服驱动器进行测试;
73.s103:第n伺服驱动器控制第n电动机构进行伸出运动,第n电动机构伸出到伸出限位后生成第一到位信号,并将该第一到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第一到位信号后控制所述第n电动机构停止伸出,并与上位机进行通信将第n电动机构的状态反馈给上位机,在上位机显示第n电动机构伸出到位;
74.在伸出运动结束后根据上位机软件预设的延时时间,延时一段时间之后开始进行缩回运动。
75.s105:第n伺服驱动器控制第n电动机构进行缩回运动,第n电动机构缩回到缩回限位后生成第二到位信号,并将该第二到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第二到位信号后控制所述第n电动机构停止缩回,并与上位机进行通信将第n电动机构的状态反馈给上位机,在上位机显示第n电动机构缩回到位;
76.s107:上位机对所述第n伺服驱动器反馈的信息进行处理分析得到第n伺服驱动器的测试结果;
77.其中,
78.在对第n伺服驱动器进行测试的过程中即步骤s103到s105,所述第n伺服驱动器实时将第n伺服驱动器的输出电流、输入电压和所述第n电动机构的电流、电压、功率、状态以及所述第n电动机构中电机的运行转矩和运行速度反馈给上位机,上位机实时显示第n伺服驱动器反馈的信息;
79.若在对第n伺服驱动器进行测试的过程中出现故障,所述第n伺服驱动器则产生报警信号,并将所述报警信号反馈给上位机,上位机实时显示该报警信号并停止测试;
80.其中,n为can网络允许的最大连接设备数量,1≤n≤n且n为整数。
81.其中,步骤s103所述的伸出运动和步骤s105所述的缩回运动能够单独进行,仅需在上位机控制软件进行相应的设置即可,例如在上位机控制软件中设置仅对伺服驱动器进行伸出控制测试,则测试过程仅执行所述步骤s101、s103和s107。在需要时,通过按下上位机控制软件上的停止按键还能够随时停止正在进行的测试。
82.对电动机构进行测试包括:
83.s109:完成对伺服驱动器的测试后,将所有伺服驱动器更换为正常的伺服驱动器(即基准伺服驱动器),并将第一到第n电动机构更换为第一到第n待测电动机构;
84.s111:按下上位机控制软件上的电动机构测试按键后上位机开始根据预设的伺服驱动器的编号、电动机构测试顺序以及第n电动机构的测试次数m和每次测试间隔时间t,驱动所述待测电动机构进行测试;
85.其中,每个电动机构的测试次数m和每次测试间隔时间t根据需要能够相同也能够
不同;
86.m为大于等于1的自然数;t大于0秒。
87.s113:第n伺服驱动器控制第n待测电动机构进行伸出运动,第n待测电动机构伸出到伸出限位后生成第一到位信号,并将该第一到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第一到位信号后控制所述第n待测电动机构停止伸出,并与上位机进行通信将第n待测电动机构的状态反馈给上位机,在上位机显示第n待测电动机构伸出到位;之后第n伺服驱动器控制第n待测电动机构进行缩回运动,第n待测电动机构缩回到缩回限位后生成第二到位信号,并将该第二到位信号反馈给第n伺服驱动器,第n伺服驱动器检测到第二到位信号后控制所述第n待测电动机构停止缩回,并与上位机进行通信将第n待测电动机构的状态反馈给上位机,在上位机显示第n待测电动机构缩回到位;其中,第n待测电动机构完成一次伸出运动和一次缩回运动为完成一次测试;
88.s115:间隔时间t后重复步骤s113,直至完成m次测试后执行步骤s117;
89.s117:上位机将第n伺服驱动器反馈的信息进行作图处理,并通过数据比较分析得到在整个测试期间第n待测电动机构的运行状态和各项数据的变化趋势,进而得到第n待测电动机构的性能完成对第n待测电动机构的测试;
90.其中,
91.在对第n待测电动机构进行测试的过程中即步骤s113和步骤s115,所述第n伺服驱动器实时将第n待测电动机构的电流、电压、功率、状态以及所述第n待测电动机构中电机的运行转矩和运行速度反馈给上位机,上位机实时显示第n伺服驱动器反馈的信息;
92.若在对第n待测电动机构进行测试的过程中出现故障,第n伺服驱动器则产生报警信号,并将所述报警信号反馈给上位机,上位机实时显示该报警信号并停止测试。在需要时,通过按下上位机控制软件上的停止按键还能够随时停止正在进行的测试。
93.其中,上述对电动机构进行测试和对伺服驱动器进行测试时可以根据需要选择要进行测试的电动机构或伺服驱动器,可以对n个电动机构或伺服驱动器都进行测试,也可以选择部分电动机构或伺服驱动器进行测试,仅需要改变所述预设电动机构测试顺序或伺服驱动器测试顺序即可。例如,仅需要依次对第五、第七和第九伺服驱动器进行测试时,预设伺服驱动器测试顺序为5、7、9即可。
94.对电动机构进行测试和对伺服驱动器进行测试能够单独进行,当仅对伺服驱动器进行测试时,仅需安装好各个器件后执行步骤s101到s107即可;当仅对电动机构进行测试时,仅需安装好各个器件后执行步骤s111到s117即可。
95.本实施例所提供的一种网络化伺服驱动器和电动机构测试系统和方法采用网络化测试伺服驱动器和电动机构,一个上位机能完成多个伺服驱动器和电动机构的分时测试,减少了对测试设备资源的需求;同时通过上位机一键自动测试减少了人为操作,降低了人力成本,提高了测试效率,通过上位机软件进行数据分析还有助于技术人员了解电动机构的性能。
96.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

