1.本实用新型涉及六自由度运动技术领域,具体涉及一种六自由度运动控制器。
背景技术:
2.运动控制(motion control)通常是指在复杂条件下,将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度控制、转矩或力的控制;六自由度运动指的是物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度方向的运动;六自由度控制器是通过结合外部的机械结构可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等。
3.但是,现有大多数六自由度运动控制器的可靠性较低,加工成本过高,并且运行控制精准度不够。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有技术的不足,提供一种六自由度运动控制器。该六自由度运动控制器结构和可靠性强,运行流畅度高,并且加工成本较低。
5.本实用新型所要解决的上述问题通过以下技术方案以实现:
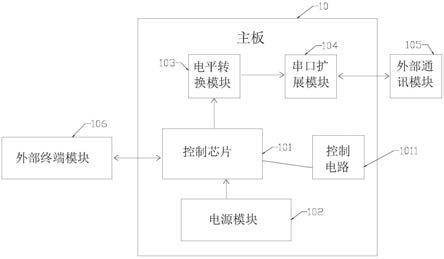
6.一种六自由度运动控制器,包括控制主板;所述控制主板上设置有控制芯片、电平转换模块、串口扩展模块和外部终端模块,所述控制芯片与所述电平转换模块连接,所述电平转换模块与所述串口扩展模块连接,所述外部终端模块与所述控制芯片输入输出端口连接,所述串口扩展模块用于输出运动信号参数至六自由度运动平台,所述外部终端模块用于输送信息至外部终端和接收外部终端的信息指令。
7.优选的,所述控制主板还包括外部通讯模块,所述外部通讯模块分别与所述串口扩展模块、所述六自由度运动平台连接,所述外部通讯模块用于向六自由度运动平台输出运动信号参数。
8.优选的,所述外部通讯模块选用无线通信模块。
9.优选的,所述外部终端模块可为aux接口、rs232接口、rj45接口、rs485接口中的一种或者多种。
10.优选的,所述控制主板还包括数据采集处理模块,所述采集处理模块与所述控制芯片连接,所述数据采集处理模块用于对数据采集装置收到六自由度运动平台的相关数据信息处理。
11.优选的,所述数据采集处理模块选用图像数据处理模块,所述数据采集装置选用图像采集装置。
12.优选的,所述控制主板还包括与所述控制芯片连接的控制电路,所述控制电路用于与所述六自由度运动平台信号连接,所述控制芯片用于控制所述控制电路的运行从而向
六自由度运动平台发送运动信号参数。
13.优选的,所述控制主板还包括电源模块,所述电源模块与所述控制芯片信号连接,所述电源模块用于对控制主板的供电。
14.优选的,所述串口扩展模块包括串口芯片,所述串口芯片的第二十四引脚通过电容c
300
接地,所述串口芯片的第二十四引脚还通过电阻r2接3.3v电压,所述串口芯片的第二十五引脚、第三十二引脚和第四十五引脚接3.3v电压,所述串口芯片的第二十六引脚通过电阻r3与3.3v电压连接,所述串口芯片的第三十一引脚和第三十三引脚接地,所述串口芯片的第一引脚和第二引脚通过电容c1和电容c2并联接地,所述并联线路中设置有源晶振y1和电阻r1,所述源晶振y1和电阻r1并联连接。
15.优选的,所述外部通讯模块包括驱动芯片;所述驱动芯片的第一引脚和第三引脚通过电容c9串联连接,所述驱动芯片的第四引脚与第五引脚通过电容c
10
串联连接,所述驱动芯片的第十六引脚通过电容c
12
接地,所述驱动芯片的第二引脚通过电容c
13
接地,所述驱动芯片的第六引脚和第十五引脚通过电容c
11
并联接地,所述驱动芯片的第十引脚和第十一引脚为tx信号输送引脚,所述驱动芯片的第七引脚和第十四引脚为wave
‑
tx输出引脚,所述驱动芯片的第九引脚和第十二引脚为rx信号输出引脚,所述驱动芯片的第八引脚和第十三引脚为wave
‑
rx输入引脚。
16.有益效果:采用本实用新型所述的结构后,通过外部终端的信息指令经过外部终端模块输送至控制芯片,经过控制芯片内部对信息指令的处理过后发送运动信号参数,运动信号参数再由电平转换模块调节电平值使得输送至串口扩展模块的稳定性得到提高,最后由串口扩展模块向六自由度运动平台输送使其执行运动指令;进而可以得到结构和运行可靠性强,运行流畅度高,并且加工成本较低,精准识别执行的六自由度运动控制器。
附图说明
17.图1是本实用新型所述的一种六自由度运动控制器的功能模块示意图。
18.图2是本实用新型所述的一种六自由度运动控制器的功能模块示意图。
19.图3是本实用新型所述的一种六自由度运动控制器的硬件构成示意图。
20.图1
‑
3:10
‑
控制主板;101
‑
控制芯片;1011
‑
控制电路;102
‑
电源模块;103
‑
电平转换模块;104
‑
串口扩展模块;105
‑
外部通讯模块;106
‑
外部终端模块;107
‑
数据采集处理模块;20
‑
六自由度运动平台;30
‑
外部终端;
21.图4是本实用新型所述的一种六自由度运动控制器的控制芯片的控制电路图。
22.图5是本实用新型所述的一种六自由度运动控制器的电源模块的电路图。
23.图6是本实用新型所述的一种六自由度运动控制器的外部通讯模块的电路图。
24.图7是本实用新型所述的一种六自由度运动控制器的电平转换模块的电路图。
25.图8是本实用新型所述的一种六自由度运动控制器的串口扩展模块的电路图。
具体实施方式
26.下面结合附图和具体实施例对本实用新型做进一步详细的说明,但实施例对本实用新型不做任何形式的限定。
27.如图1
‑
3所示,一种六自由度运动控制器,包括控制主板10,所述控制主板10上设
置有控制芯片101、电平转换模块103、串口扩展模块104和外部终端模块106,所述控制芯片101与所述电平转换模块103连接,所述电平转换模块103与所述串口扩展模块104连接,所述外部终端模块106与所述控制芯片101输入输出端口连接,所述串口扩展模块104用于输出运动信号参数至六自由度运动平台20,所述外部终端模块106用于输送信息至外部终端30和接收外部终端30的信息指令。
28.其中,外部终端300可以以各种形式来实施。例如,本技术中描述的外部终端可以包括诸如移动电话、智能手机、笔记本电脑、数字广播接收器、pda(个人数字助理)、pad(平板电脑)、pmp(便携式多媒体播放器)、导航装置等等的移动终端以及诸如数字tv、台式计算机等等的固定终端。本文,假设外部终端是移动终端。然而,本领域技术人员将理解的是,除了特别用于移动目的的元件之外,根据本发明的实施方式的构造也能够应用于固定类型的终端。
29.通过外部终端的信息指令经过外部终端模块输送至控制芯片,经过控制芯片内部对信息指令的处理过后发送运动信号参数,运动信号参数再由电平转换模块调节电平值使得输送至串口扩展模块的稳定性得到提高,最后由串口扩展模块向六自由度运动平台输送使其执行运动指令;进而可以得到结构和运行可靠性强,运行流畅度高,并且加工成本较低,精准识别执行的六自由度运动控制器。
30.其中,六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。而六自由度运动平台是由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(x,y,z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
31.具体地,所述串口扩展模块104包括型号为wk2168的串口芯片,所述串口芯片的第二十四引脚通过电容c
300
接地,所述串口芯片的第二十四引脚还通过电阻r2接3.3v电压,所述串口芯片的第二十五引脚、第三十二引脚和第四十五引脚接3.3v电压,所述串口芯片的第二十六引脚通过电阻r3与3.3v电压连接,所述串口芯片的第三十一引脚和第三十三引脚接地,所述串口芯片的第一引脚和第二引脚通过电容c1和电容c2并联接地,所述并联线路中设置有源晶振y1和电阻r1,所述源晶振y1和电阻r1并联连接。
32.具体地,所述控制主板10还包括外部通讯模块105,所述外部通讯模块105分别与所述串口扩展模块104、所述六自由度运动平台20连接,所述外部通讯模块105用于向六自由度运动平台20输出运动信号参数。
33.其中,所述外部通讯模块105包括型号为max232ese的驱动芯片,该驱动芯片与控制芯片的串行通讯接口相连接。
34.其中,如图6所示,所述驱动芯片的第一引脚和第三引脚通过电容c9串联连接,所述驱动芯片的第四引脚与第五引脚通过电容c
10
串联连接,所述驱动芯片的第十六引脚通过电容c
12
接地,所述驱动芯片的第二引脚通过电容c
13
接地,所述驱动芯片的第六引脚和第十五引脚通过电容c
11
并联接地,所述驱动芯片的第十引脚和第十一引脚为tx信号输送引脚,所述驱动芯片的第七引脚和第十四引脚为wave
‑
tx输出引脚,所述驱动芯片的第九引脚和第十二引脚为rx信号输出引脚,所述驱动芯片的第八引脚和第十三引脚为wave
‑
rx输入引脚。
35.还可以理解为,外部通讯模块105还包括两组串行通讯接口(uart
‑
a和uart
‑
b),其
中控制芯片的scitxda、scirxda引脚作为uart
‑
a接口的发送数据和接收数据引脚;scitxdb、scirxdb引脚作为uart
‑
b接口的发送数据和接收数据引脚。uart
‑
a接口负责与外部终端进行通讯,uart
‑
a接口负责与六自由度运动平台进行通讯。
36.还可以理解为,所述外部通讯模块105选用无线通信模块,通过无线通信模块将运动信息指令快速地输送至六自由度运动平台,避免了有线输送带来的弊端;其中所述无线通信模块可选用蓝牙模块、nfc芯片组件、wifi模块等。
37.具体地,所述外部终端模块106可为aux接口、rs232接口、rj45接口、rs485接口中的一种或者多种,实现控制芯片101与外部终端300之间的信息指令输送的稳定性和流畅性。
38.具体地,所述控制主板10还包括数据采集处理模块107,所述采集处理模块107与所述控制芯片101连接,所述数据采集处理模块107用于对数据采集装置收到六自由度运动平台20的相关数据信息处理,所述相关数据信息包括六自由度运动平台20所处的环境情况等。
39.其中,所述数据采集处理模块107优选用图像数据处理模块,所述数据采集装置选用图像采集装置,通过外部图像采集装置对六自由度运动平台的相关数据信息采集归档,再与所述图像数据处理模块进行信号输送,紧接着将信号信息输送至控制芯片,使其对采集到的数据进行采集、编码、处理,再将其得到数据输送至外部终端,再由外部终端进行转换处理,发出运动信号指令返回控制芯片,最后由控制芯片输出运动信号参数至六自由度运动平台,使其进行运动。
40.具体地,所述控制主板10还包括与所述控制芯片101连接的控制电路1011,所述控制电路1011用于与所述六自由度运动平台20信号连接,所述控制芯片101用于控制所述控制电路1011的运行从而向六自由度运动平台20发送运动信号参数。
41.通过控制芯片101在接收到数据采集装置的信息并且经过外部终端发出运行指令后,可控制与其连接的六自由度运动平台20进行所设定的运动信号参数的行动;或者接收操作人员操作外部终端进行的手动输入的指令,直接向控制电路1011发送电信号,以使得六自由度运动平台20按照特定指令进行运转。
42.具体地,所述控制主板10还包括与所述控制芯片101连接的存储单元,所述存储单元与所述数据采集处理模块107连接,所述控制芯片101用于控制所述数据采集处理模块107接收并识别处理得到的数据。
43.具体地,所述控制主板10还包括电源模块102,所述电源模块102与所述控制芯片101信号连接,所述电源模块102用于对控制主板10的供电。
44.其中,所述电源模块102包括蓄电池和供电电路,该蓄电池用于供电和蓄电;所述供电电路如图5所示,外部提供纯净的5v电源输入,为了提高可靠性,再经过一个0.1μf的极性电容滤波后进入电源芯片,1.8v、3.3v的使能端接地,建立起双电压。输出电压经过10μf极性电容和一个铁氧化体磁珠滤波后提供的电源电压。当输出1.8v或3.3v下降5%时,控制芯片产生复位信号并保持200ms,经过一个与门输出的复位;这样就保证了控制芯片在可靠性电源下工作。
45.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺
时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系以及术语“第一”、“第二”,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
46.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
47.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
48.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

