1.本发明涉及机器视觉的技术领域,尤其涉及到一种模拟海洋动态不确定环境的航行器路径规划方法。
背景技术:
2.随着科技和工业的进步,智能机器人的应用越来越广泛,有军事用途的无人驾驶飞机、科研探索的深海潜行器等,机器人技术成为高科技研究的一大领域。在机器人系统中,移动机器人的自主导航是关键问题之一。对于移动机器人的自主导航,核心在于规划一条可靠路径,使机器人可以避免碰撞障碍物并移动到任务的目标地点。路径规划作为实现机器人自主导航技术的关键,是机器人系统研究的热点问题。
3.在动态不确定的环境中,存在动态移动或蔓延扩散的威胁因素(例如森林火灾、雷达探照、台风、洋流等),以及动态的目标对象。根据实际收集的信息可以对威胁因素的移动模式进行建模并对无人机在不同时刻不同位置的受威胁程度进行评估。可靠路径指通过算法优化得到的路径不仅要避开所有障碍物,还要保证移动过程中每一时刻的动态威胁评估值不能超过一定的阈值。
4.蚁群算法具有分布计算、信息正反馈和启发式搜索的特点,本质上是进化算法中的一种启发式全局优化算法,已广泛应用于旅行商问题等组合优化问题。但传统的蚁群算法应用于路径规划往往只考虑距离因素,对现实中动态变化的环境缺乏可靠性。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种更具实用性和可靠性的模拟海洋动态不确定环境的航行器路径规划方法。
6.为实现上述目的,本发明所提供的技术方案为:
7.一种模拟海洋动态不确定环境的航行器路径规划方法,根据实际环境对海洋区域中的规律性环境因素进行模型构建,根据不同障碍物对航行的影响程度分配障碍权值,并在路径运行过程中对障碍物的位置进行更新;
8.具体包括如下步骤:
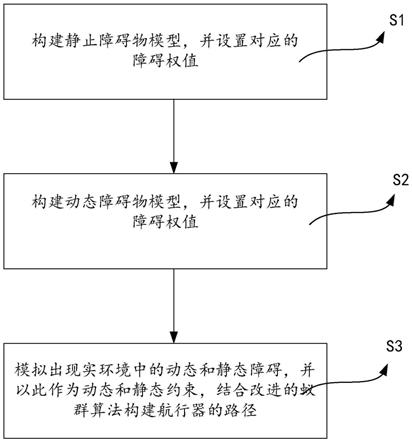
9.s1、根据实际环境构建静止障碍物模型,并将静止障碍物对航行的障碍权值设为1;
10.s2、根据实际环境构建动态障碍物模型,并将动态障碍物对航行的障碍权值设为(0,1)之间的值;
11.s3、通过步骤s1构建的静止障碍物模型和步骤s2构建的动态障碍物模型,模拟出现实环境中的动态和静态障碍,并以此作为动态和静态约束,结合改进的蚁群算法构建航行器的路径。
12.进一步地,所述步骤s3中,构建航行器路径的具体过程如下:
13.s3
‑
1、根据已走路径计算出航行器移动到当前位置耗费的时间,并根据动态障碍
物模型推算出障碍物的当前位置;
14.s3
‑
2、计算下一步各个方向的启发值以及判定是否碰撞到障碍物;
15.s3
‑
3、根据启发值和信息素构建轮盘赌;
16.s3
‑
4、通过轮盘赌随机选择下一步移动方向;
17.s3
‑
5、更新蚂蚁位置及评价值;
18.s3
‑
6、移动步数加1,并返回步骤s3
‑
1,直到路径构建完成。
19.进一步地,根据航行器的当前位置到下一步可选航行方向的障碍权值计算启发值,候选方向的障碍越大,启发值越小,选择该方向的可能性越小;候选方向的障碍越小,启发值越大,选择该方向的可能性越大;
20.当候选方向上为静止障碍物时,启发值为0;当候选方向上为动态障碍物时,启发值为1减动态障碍物对应的障碍权值;当候选方向上没有障碍时,启发值为1。
21.与现有技术相比,本方案原理及优点如下:
22.1)本方案中,环境模型随着路径构建实时更新,模拟现实环境的动态阻碍和静态障碍,构成算法中的动态约束和静态约束,使优化得到的路径更具实用性和可靠性。
23.2)本方案中结合改进mmas算法的启发式方法,蚂蚁倾向于选择没有障碍或障碍较少的方向,使算法在构建路径的过程中能自动躲避或绕开障碍。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的服务作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1为本发明一种模拟海洋动态不确定环境的航行器路径规划方法的原理流程图;
26.图2为本发明中蚁群算法在动态环境中构建路径的原理流程图。
具体实施方式
27.下面结合具体实施例对本发明作进一步说明:
28.本实施例所述的一种模拟海洋动态不确定环境的航行器路径规划方法,根据实际环境对海洋区域中的规律性环境因素进行模型构建,根据不同障碍物对航行的影响程度分配障碍权值,并在路径运行过程中对障碍物的位置进行更新;在对路径进行优化时,使用启发式方法使路径更倾向于远离障碍;对路径进行评价时,从起点开始进行计时,实时对障碍的位置进行更新,检查航行器是否碰到障碍,并根据权值影响评价值。
29.如图1所示,具体包括以下步骤:
30.s1、根据实际环境构建静止障碍物模型,此类障碍物的位置不随时间而变化,如礁石、岛屿等,同时此类障碍物对航行器的威胁最大,碰撞到此类障碍有可能导致航行器搁浅甚至沉没,无法继续完成任务,因此对评价的影响权值最大,将静止障碍物对航行的障碍权值设为1;
31.s2、根据实际环境构建动态障碍物模型,此类障碍物的位置可能随时间变化,如洋
流、风暴等,虽然对航行器有一定的影响,但可以衡量收益和损耗选择避开障碍物或穿越障碍物,对评价值的影响较小,将动态障碍物对航行的障碍权值设为(0,1)之间的值,无阻碍的海域的权值为0;
32.s3、通过步骤s1构建的静止障碍物模型和步骤s2构建的动态障碍物模型,模拟出现实环境中的动态和静态障碍,并以此作为动态和静态约束,结合改进的蚁群算法构建航行器的路径;
33.如图2所示,本步骤的具体过程如下:
34.s3
‑
1、根据已走路径计算出航行器移动到当前位置耗费的时间,并根据动态障碍物模型推算出障碍物的当前位置;
35.s3
‑
2、计算下一步各个方向的启发值以及判定是否碰撞到障碍物;
36.s3
‑
3、根据启发值和信息素构建轮盘赌;
37.s3
‑
4、通过轮盘赌随机选择下一步移动方向;
38.s3
‑
5、更新蚂蚁位置及评价值;
39.s3
‑
6、移动步数加1,并返回步骤s3
‑
1,直到路径构建完成。
40.上述中,根据航行器的当前位置到下一步可选航行方向的障碍权值计算启发值,候选方向的障碍越大,启发值越小,选择该方向的可能性越小;候选方向的障碍越小,启发值越大,选择该方向的可能性越大;
41.当候选方向上为静止障碍物时,启发值为0;当候选方向上为动态障碍物时,启发值为1减动态障碍物对应的障碍权值;当候选方向上没有障碍时,启发值为1。
42.本实施例中,环境模型随着路径构建实时更新,模拟现实环境的动态阻碍和静态障碍,构成算法中的动态约束和静态约束,使优化得到的路径更具实用性和可靠性。
43.以上所述之实施例子只为本发明之较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。