1.本实用新型总体上涉及一种用于箱体可卸式车辆的气动控制系统,特别是能够以一键方式对箱体进行放箱和拉箱操作的气动控制系统。本实用新型还涉及一种包括上述气动控制系统的箱体可卸式车辆。
背景技术:
2.目前市场上存在大量的箱体可卸式车辆,诸如用于传统工业领域的全挂自卸货车、用于消防领域的消防车以及用于环卫领域的垃圾车等等。在此类箱体可卸式车辆当中,通常采用设置在车体上的拉臂对可卸的箱体进行放箱和拉箱的操作以实现对箱体(如消防领域的水箱、器材箱、应急救助箱;环卫领域的垃圾压缩箱等)的转运。以放箱操作为例,其操作顺序依次为放下车辆的后滚轮支撑、打开拉臂锁紧结构、滑移箱体、举升拉臂直至箱体完全着地。相应地,在拉箱操作中则是将上述四个步骤进行反向操作。
3.需要说明的是,现有的操控方式均是对上述各个动作进行单独控制,因此在操控上较为繁琐。同时,由于上述各个动作需要严格按照顺序依次进行,因此在操作者疲劳或是紧急的情况下,容易发生误操作,从而影响工作效率甚至可能发生安全问题。另外,单独控制各个动作势必造成整个气动控制系统的复杂化以及故障率的升高。
技术实现要素:
4.针对上述存在的问题,本实用新型旨在提供一种用于箱体可卸式车辆的气动控制系统,其能够以一键式方式对箱体进行放箱和拉箱操作,在简化操作流程的同时减少误操作的可能,从而提升整个系统的工作效率。
5.根据本实用新型的一个方面,提供了一种气动控制系统,包括:气罐,其储存有加压气体;第一输气管路,所述第一输气管路经由主气控阀与所述气罐相连并通过主气控阀的启动输出所述加压气体;n个第一类控制阀,其中n为正整数,取决于n的数值,所述第一类控制阀在第一输气管路的一个位置处与其连接或者沿着第一输气管路的多个位置依次串联连接;以及沿着第一输气管路依次并联连接的n 1个先导阀,其中除了第一输气管路最下游的一个先导阀以外的其它n个先导阀分别经由所述n个第一类控制阀中的相应一个依次并联于所述第一输气管路,每个先导阀具有动作部件;其中第一类控制阀中的控制阀各自限定有进气口、第一出气口和第二出气口,所述进气口与所述第一输气管路的在该控制阀上游的部分相连,所述第一出气口与对应的先导阀相连,所述第二出气口与所述第一输气管路的在该控制阀下游的部分相连,并且所述第一类控制阀中的控制阀各自具有受到所述动作部件的关联运动而切换的初始状态和驱动状态,在初始状态下,所述进气口与所述第一出气口连通并与所述第二出气口断开,在驱动状态下,所述进气口与所述第一出气口断开并与所述第二出气口连通。
6.优选地,所述气动控制系统还包括:第二输气管路,所述第二输气管路经由主气控阀与所述气罐相连,所述主气控阀可操作以选择性地从所述第一输气管路或所述第二输气
管路输出所述加压气体;n个第二类控制阀,取决于n的数值,所述第二类控制阀在第二输气管路的一个位置处与其连接或者沿着第二输气管路的多个位置依次串联连接;并且所述n 1个先导阀沿着第二输气管路依次并联连接,其中除了第二输气管路最下游的一个先导阀以外的其它n个先导阀分别经由所述n个第二类控制阀中的相应一个依次并联于所述第二输气管路,并且第二输气管路中最下游的一个先导阀为第一输气管路中最上游的一个先导阀,第二输气管路中最上游的一个先导阀为所述第一输气管路中最下游的一个先导阀;其中第二类控制阀中的控制阀各自限定有进气口、第一出气口和第二出气口,第二类控制阀中的控制阀的进气口与所述第二输气管路的在该控制阀上游的部分相连,第二类控制阀中的控制阀的第一出气口与对应的先导阀相连,第二类控制阀中的控制阀的第二出气口与所述第二输气管路的在该控制阀下游的部分相连,并且第二类控制阀中的控制阀各自具有受到所述动作部件的关联运动而切换的初始状态和驱动状态,在初始状态下,第二类控制阀中的控制阀的进气口与该控制阀的第一出气口连通并与该控制阀的第二出气口断开,在驱动状态下,第二类控制阀中的控制阀的进气口与该控制阀的第一出气口断开并与该控制阀的第二出气口连通。
7.优选地,所述先导阀包括作用室,所述动作部件为活塞杆,所述活塞杆将先导阀的作用室分为第一气室和第二气室并能够在作用室中往复移动。
8.优选地,所述第一气室中设置有与所述活塞杆相连的复位弹簧。
9.优选地,所述第一类控制阀中的每个控制阀的第一出气口与同该控制阀对应的先导阀的第一气室连通,并且所述第二类控制阀中的每个控制阀的第一出气口与同该控制阀对应的先导阀的第二气室连通。
10.优选地,所述第一类控制阀和第二类控制阀中的每个控制阀为两位五通阀,具有通向大气的两个排气口。
11.优选地,所述第一类控制阀和第二类控制阀中的每个控制阀为滚轮杠杆式机械阀。
12.可选地,所述第一类控制阀和第二类控制阀中的每个控制阀为单电控式电磁阀。
13.优选地,所述主气控阀还包括被启动以停止输出加压气体的紧急制动开关。
14.根据本实用新型的另一个方面,提供一种箱体可卸式车辆,包括拉臂、用于控制拉臂滑动的滑动液压缸、以及用于控制拉臂举升翻转的主液压缸,其中所述箱体可卸式车辆还包括如上所述的气动控制系统,所述气动控制系统的其中两个先导阀分别为所述滑动液压缸和所述主液压缸的先导作用部件。
15.采用本实用新型的气动控制系统能够获得如下技术效果:1)操作更加便捷,误操作概率大幅度降低,提高工作效率;2)控制系统的整体结构更加简洁,维修更加简单;3)系统的整体安全性得以增加。
附图说明
16.从下述的详细说明并结合下面的附图将能更全面地理解本技术的前述及其它方面。需要指出的是,各附图的比例出于清楚说明的目的有可能不一样,但这并不会影响对本技术的理解。在附图中:
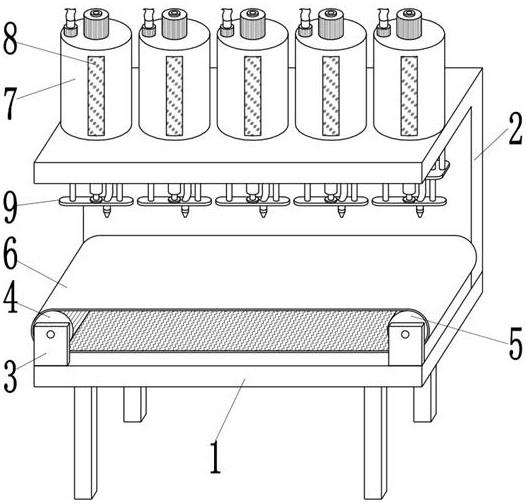
17.图1示意性地示出了根据本实用新型的箱体可卸式车辆的拉臂设备的整体示意
图;
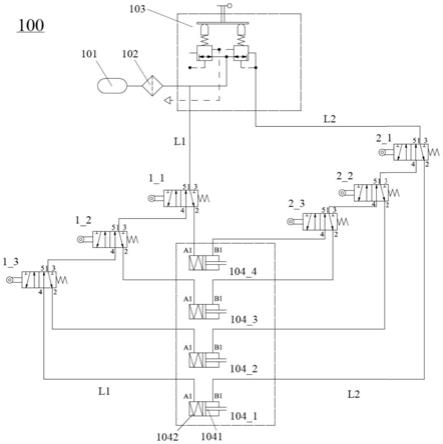
18.图2示出了根据本实用新型的气动控制系统的气动工作原理图;
19.图3示出了根据本实用新型的气动控制系统的一简化实施例的气动工作原理图;
20.图4示出了根据本实用新型的气动控制系统的又一简化实施例的气动工作原理图。
21.在本技术的各附图中,结构相同或功能相似的特征由相同的附图标记表示。
具体实施方式
22.参见图1,其示出了根据本实用新型的箱体可卸式车辆的拉臂设备的整体示意图。如图1所示的拉臂设备设置在箱体可卸式车辆的车架50上,并且包括拉臂10、滑移翻转架20、用于控制拉臂滑动的滑动液压缸30以及用于控制拉臂举升翻转的主液压缸40。拉臂呈l形,l形拉臂的其中一个臂的末端设置有挂钩用于与车辆的箱体挂接,而另一个臂在滑动液压缸30的驱动下可滑动地接收在滑移翻转架20的滑动接收部201内,滑移翻转架20的翻转部202的一端与车架铰接,而另一端与主液压缸的一端铰接,主液压缸的另一端与车架铰接。可卸式车辆的车架上还设置有用于箱体滑移的滚轮支撑60、将拉臂锁定就位的锁紧机构70以及对锁紧机构进行驱动的锁定液压缸(未示出)。除此之外,为安全起见,上述可卸式车辆还可设置有用于在放箱和拉箱操作中提升整体稳定性的后滚轮支撑以及用于对后滚轮支撑进行驱动以将其收放的稳定液压缸。
23.结合之前背景技术部分的记载,本实用新型提供的箱体可卸式车辆的整个放箱工作流程可依次分为以下阶段:即控制稳定液压缸以放下后滚轮支撑、控制锁定液压缸以将拉臂的锁紧机构解锁、控制滑动液压缸以使拉臂连同箱体沿车架方向后移、以及控制主液压缸使滑移翻转架向后枢转从而完成放箱操作。箱体可卸式车辆的整个拉箱工作流程与上述放箱工作流程正好完全相反,在此不再赘述。在现有技术中,通常采用不同的气控阀对各个液压缸进行单独控制。也就是说,对于上述主液压缸、滑动液压缸、锁定液压缸和稳定液压缸而言,需要操作者严格按照工作流程依次对四个气控阀进行人工操作。
24.为了减少现有控制方式的误操作以及提升整个控制系统的效率和安全性,本实用新型提出了新式气动控制系统,其通过对单独一个主气控阀进行一键式操作即可完成箱体的放箱和/或拉箱操作。图2示出了本技术的新式气动控制系统的气动工作原理图。结合图2,气动控制系统100包括气罐101,其储存有发动机运行过程中排放的部分加压气体,其中加压气体的压力在大约0.4至8bar之间;第一输气管路l1,所述第一输气管路l1经由过滤器102、主气控阀103与所述气罐101相连并通过主气控阀的选择性操作输出所述加压气体;沿着第一输气管路l1依次串联连接的第一类控制阀(图中示出为三个1_1、1_2和1_3);沿着第一输气管路l1依次并联连接的多个先导阀(图中示出为四个104_1、104_2、104_3和104_4),其中除了第一输气管路l1最下游的一个先导阀104_1以外的其它三个先导阀分别经由第一类的三个控制阀中的相应一个依次并联于所述第一输气管路l1。在此需要说明的是,本文中所称的“上游”和“下游”是根据加压气体在输气管路中行进经过的先后位置区分,率先经过的部分称为输气管路的“上游”而稍后经过的部分称为输气管路的“下游”。另外,本文所称的“串联”是指处于下游的控制阀的进气由输气管路在该控制阀上游的部分(例如由该控制阀的上游一个控制阀的出气)供给;而本文中所称的“并联”是指不同的先导阀分别在同
一输气管路上下游的不同位置处与该输气管路(直接或间接)连通从而接受所供给的气体。进一步地,所述气动控制系统还包括第二输气管路l2,所述第二输气管路l2经由主气控阀103与所述气罐相连,所述主气控阀可操作以选择性地从所述第一输气管路l1或所述第二输气管路l2输出所述加压气体;以及沿着第二输气管路依次串联连接的第二类控制阀(图中同样示出为三个2_1、2_2和2_3)。并且之前所述的四个先导阀同样沿着第二输气管路依次并联连接。需要说明的是,上述先导阀在第一输气管路中相对于彼此的上下游关系与在第二输气管路中相对于彼此的上下游关系恰好完全相反。例如,在第一输气管路l1中处于最下游的先导阀104_1反而是第二输气管路l2中处于最上游的一个先导阀,反之在第一输气管路l1中处于最上游的先导阀104_4反而是第二输气管路l2中最下游的一个先导阀。此处,除了第二输气管路最下游的一个先导阀104_4以外的其它三个先导阀分别经由第二类控制阀中的相应一个依次并联于所述第二输气管路l2。
25.以本文中的箱体可卸式车辆的拉臂控制系统为例,图2中所示的四个先导阀分别作为之前所述的四个不同液压缸的先导作用部件。为清楚所示,图中并未完整示出液压缸的其余部分。例如,先导阀104_1作为拉臂控制系统中主液压缸的先导作用部件,先导阀104_2作为滑动液压缸的先导作用部件,先导阀104_3作为锁定液压缸的先导作用部件,且先导阀104_4作为稳定液压缸的先导作用部件。如图所示,每个先导阀包括作用室以及活塞杆1041形式的动作部件,该活塞杆将先导阀的作用室分为第一气室a1和第二气室b1并能够在作用室中往复移动,并且第一气室a1中具有与所述活塞杆相连的复位弹簧1042。进一步地,每个先导阀的第一气室a1是与第一输气管路中串联连接的各个控制阀相连,而其第二气室b1是与第二输气管路中串联连接的各个控制阀相连。
26.以下对本实用新型的各气控部件之间的连接进行详细解释。本实用新型的气动控制系统所采用的第一类和第二类控制阀具有相同的结构并且为两位五通控制阀,所述控制阀限定有进气口1、第一出气口2和第二出气口4以及两个通向大气的排气口3、5。其中所述进气口与对应输气管路的在该控制阀上游的部分相连,所述第一出气口与对应的先导阀相连,所述第二出气口与对应输气管路的在该控制阀下游的部分相连。为方便在下文的描述中将各个控制阀及其进气口、出气口、排气口区分清楚,本文采用x_y的形式表示各个控制阀以及采用x_y_z的形式对控制阀的上述各个端口进行表示,其中x表示第x类控制阀,y表示该类控制阀中的第y个控制阀,以及z表示相应控制阀的端口。例如,1_1表示第一类(即与第一输气管路l1相连)控制阀中的第一个控制阀,2_1则表示第二类(即与第二输气管路l2相连)控制阀中的第一个控制阀;相应地,1_1_1表示第一类控制阀中的第一控制阀1_1的进气口,2_1_2表示第二类控制阀中的第一控制阀2_1的第一出气口等等。具体而言,第一类控制阀中的第一控制阀1_1的进气口1_1_1与第一输气管路l1的在该控制阀上游的部分(即直接与第一输气管路的起始段)相连,该第一控制阀1_1的第一出气口1_1_2与先导阀104_4的第一气室a1连通,而该第一控制阀的第二出气口1_1_4与第一输气管路中在该第一控制阀下游的部分(即第一类控制阀中的第二控制阀1_2的进气口1_2_1)连通;该第二控制阀的第一出气口1_2_2与先导阀104_3的第一气室a1连通,而该第二控制阀的第二出气口1_2_4与第一类控制阀中的第三控制阀1_3的进气口1_3_1连通;该第三控制阀的第一出气口1_3_2与先导阀104_2的第一气室a1连通,并且其第二出气口1_3_4与第一输气管路中在该第三控制阀下游的部分、即先导阀104_1的第一气室a1连通。第二类控制阀与各先导阀之间的连接
方式与第一类控制阀相类似,区别仅在于之前所述的在输气管路中的上下游相对关系彼此颠倒以及是与对应先导阀的第二气室b1连通,在此不再赘述。
27.每个控制阀具有初始状态和驱动状态,在初始状态下,进气口与第一出气口连通并与第二出气口断开;在驱动状态下,进气口与第一出气口断开并与第二出气口连通。并且所述控制阀能够取决于与其相连的先导阀的动作部件的关联运动而在初始状态与驱动状态之间进行切换。如图所示,本实施例中的控制阀采用的是滚轮杠杆式机械阀。也就是说,将控制阀设置在系统的适当位置处,使得当前述先导阀的动作部件的关联运动最终导致另外的运动部件对滚轮造成挤压时,滚轮连同其杠杆被下压从而实现控制阀从初始状态切换至驱动状态,并且当所述另外的运动部件远离该控制阀使得对滚轮的挤压作用消失时,控制阀通过另一端设置的复位弹簧的驱动力恢复至初始状态。本领域技术人员能够预想的是,除了上述机械式的驱动机构以外,还可以采用电驱动的方式,即通过对外部信号的响应选择对控制阀中的电磁管通电或断电,以传统电磁阀的形式对阀芯驱动从而完成初始状态与驱动状态之间的切换。此外,本技术中的控制阀并不仅受限于图示的两位五通阀,本领域技术人员可根据实际应用采用能够实现两路输出管路切换的任何形式的控制阀。
28.以下结合图2所示的气动工作原理图对本实用新型的一键式气动控制系统的工作流程进行叙述。当准备进行拉臂放箱操作时,操作者对设置在驾驶室内的主气控阀进行手动操作,例如在本实施例中利用手柄将主气控阀向左侧掰动,使得来自气罐101的加压气体通过过滤器102以及该主气控阀103选择从第一输气管路l1输出,从该输气管路输出的加压气体通过进气口1_1_1进入第一类控制阀中的第一控制阀1_1,并且在该第一控制阀的初始状态下从第一出气口1_1_2输出进入先导阀104_4的第一气室a1,此时该先导阀的活塞杆向第二气室b1方向推动进而通过其关联运动使得该先导阀所属的稳定液压缸执行放下后滚轮支撑的操作,当放下后滚轮支撑的操作到位时,取决于该第一控制阀1_1的设置位置,其滚轮式的机械驱动机构受到在放下后滚轮支撑的过程中相应运动部件的挤压从而实现该第一控制阀的状态切换,此时该第一控制阀从初始状态下的进气口1_1_1与第一出气口1_1_2连通转换为驱动状态下进气口1_1_1与第二出气口1_1_4连通;接下来,从第二出气口1_1_4输出的加压气体经由进气口1_2_1进入第一类控制阀中的第二控制阀1_2,并且在该第二控制阀的初始状态下从第一出气口1_2_2输出进入先导阀104_3的第一气室a1,此时该先导阀的活塞杆向第二气室b1方向推动进而通过其关联运动使得该先导阀所属的锁定液压缸执行解锁拉臂锁紧结构的操作,当解锁拉臂锁紧结构的操作到位时,取决于该第二控制阀1_2的设置位置,其滚轮式的机械驱动机构受到在解锁拉臂锁紧结构的过程中相应运动部件的挤压从而实现该第二控制阀的状态切换,此时该第二控制阀从初始状态下的进气口1_2_1与第一出气口1_2_2连通转换为驱动状态下进气口1_2_1与第二出气口1_2_4连通;接下来,从第二出气口1_2_4输出的加压气体经由进气口1_3_1进入第一类控制阀中的第三控制阀1_3,并且在该第三控制阀的初始状态下从第一出气口1_3_2输出进入先导阀104_2的第一气室a1,此时该先导阀的活塞杆向第二气室b1方向推动进而通过其关联运动使得该先导阀所属的滑动液压缸执行将拉臂带动箱体滑动的操作,当上述滑动操作到位时,取决于该第三控制阀1_3的设置位置,其滚轮式的机械驱动机构受到在拉臂连同箱体滑动的过程中相应运动部件的挤压从而实现该第三控制阀的状态切换,此时该第三控制阀从初始状态下的进气口1_3_1与第一出气口1_3_2连通转换为驱动状态下进气口1_3_1与第二出气口1_
3_4连通;接下来,从第二出气口1_3_4输出的加压气体进入先导阀104_1的第一气室a1,此时该先导阀的活塞杆向第二气室b1方向推动进而通过其关联运动使得该先导阀所属的主液压缸执行使拉臂举升翻转从而放箱的操作。通过如上方式,操作者可通过对主气控阀的一键式操作完成放箱四个阶段的全部操作。
29.反之,当需要进行拉箱操作时,首先将拉臂的拉钩钩住箱体,接下来操作者对设置在驾驶室内的主气控阀进行手动操作,例如在本实施例中利用手柄将主气控阀向右侧掰动,使得来自气罐101的加压气体通过过滤器102以及该主气控阀103选择从第二输气管路l2输出。从该第二输气管路l2输出的加压气体通过进气口2_1_1进入第二类控制阀中的第一控制阀2_1,并且在该第一控制阀的初始状态下从第一出气口2_1_2输出进入先导阀104_1的第二气室b1,此时该先导阀的活塞杆向第一气室a1方向推动进而通过其关联运动使得该先导阀所属的主液压缸回收直至箱体整体放至箱体可卸式车辆的车架上。当箱体整体放至车架上的操作到位时,取决于该第一控制阀2_1的设置位置,其滚轮式的机械驱动机构受到上述操作过程中相应运动部件的挤压从而实现该第一控制阀的状态切换,此时该第一控制阀从初始状态下的进气口2_1_1与第一出气口2_1_2连通转换为驱动状态下进气口2_1_1与第二出气口2_1_4连通;接下来,从第二出气口2_1_4输出的加压气体经由进气口2_2_1进入第二类控制阀中的第二控制阀2_2,并且在该第二控制阀的初始状态下从第一出气口2_2_2输出进入先导阀104_2的第二气室b1,此时该先导阀的活塞杆向第一气室a1方向推动进而通过其关联运动使得该先导阀所属的滑动液压缸执行沿着车架使箱体整体向前滑动的操作,当滑动箱体的操作到位时,取决于该第二控制阀2_2的设置位置,其滚轮式的机械驱动机构受到在滑动箱体的过程中相应运动部件的挤压从而实现该第二控制阀的状态切换,此时该第二控制阀从初始状态下的进气口2_2_1与第一出气口2_2_2连通转换为驱动状态下进气口2_2_1与第二出气口2_2_4连通;接下来,从第二出气口2_2_4输出的加压气体经由进气口2_3_1进入第二类控制阀中的第三控制阀2_3,并且在该第三控制阀的初始状态下从第一出气口2_3_2输出进入先导阀104_3的第二气室b1,此时该先导阀的活塞杆向第一气室a1方向推动进而通过其关联运动使得该先导阀所属的锁定液压缸执行将拉臂锁紧结构进行锁定的操作,当上述锁定操作到位时,取决于该第三控制阀2_3的设置位置,其滚轮式的机械驱动机构受到在拉臂锁紧结构的锁定过程中相应运动部件的挤压从而实现该第三控制阀的状态切换,此时该第三控制阀从初始状态下的进气口2_3_1与第一出气口2_3_2连通转换为驱动状态下进气口2_3_1与第二出气口2_3_4连通;接下来,从第二出气口2_3_4输出的加压气体进入先导阀104_4的第二气室b1,此时该先导阀的活塞杆向第一气室a1方向推动进而通过其关联运动使得该先导阀所属的稳定液压缸执行收起后滚轮支撑的操作。通过如上方式,操作者可通过对主气控阀的一键式操作完成拉箱四个阶段的全部操作。
30.需要说明的是,在上述拉箱的各个阶段的转换期间,随着在之前放箱阶段中相应的运动部件对上述第一类中各控制阀的滚轮式机械驱动机构的挤压作用消失,同时由于第一输气管路在拉箱过程中关闭以及此时各控制阀另一端设置的复位弹簧的恢复力的作用,负责对放箱操作进行控制的各控制阀会依次恢复至其初始状态以准备进行下一次的放箱操作。反之亦然,即在放箱的各个阶段的转换期间,随着在之前拉箱阶段中相应的运动部件对上述第二类中各控制阀的滚轮式机械驱动机构的挤压作用消失,同时由于第二输气管路在放箱过程中关闭以及此时各控制阀另一端设置的复位弹簧的恢复力的作用,负责对拉箱
操作进行控制的各控制阀会依次恢复至其初始状态以准备进行下一次的拉箱操作。此外,在操作过程中,随着各先导阀的活塞杆在第一气室a1和第二气室b1之间往复移动,被推压一方气室中残留的加压气体可通过与其上游连接的对应控制阀的排气口3或5(具体取决于该控制阀当时所处的状态)排向大气,同时借助于在第一气室中设置的复位弹簧以实现对先导阀的气室间的压力平衡并将活塞杆复位。
31.图3示出了根据本实用新型的在图2基础上简化了的气动工作原理图。与图2相比,图3所示的气动控制系统减少了一个先导阀104_4(即作为稳定液压缸的先导作用部件的那个先导阀),同时分别与第一输气管路和第二输气管路的连接的两类控制阀各自减少了一个,其它气控元件的连接方式以及操作原理与图2完全相同。结合之前参考图2对一键式循序控制四个液压缸以完成放箱和拉箱操作的描述,图3所示的实施例能够实现一键式循序控制三个液压缸的操作。
32.图4示出了根据本实用新型的在图3基础上进一步简化了的气动工作原理图。与图3相比,图4所示的气动控制系统进一步减少了一个先导阀104_3(即作为锁定液压缸的先导作用部件的那个先导阀),同时分别与第一输气管路和第二输气管路的连接的两类控制阀各自进一步减少一个控制阀。与之前所述的实施例相比,不同之处仅在于,此时每类控制阀中仅各自剩余一个控制阀1_1和2_1,这两个控制阀分别在第一输气管路l1和第二输气管路l2的一个位置处连接于相应的输气管路,而非与其它控制阀依次串联连接。除上述连接方式的区别以外,该实施例的操作原理与之前所述实施例完全相同。结合之前参考图2对一键式循序控制四个液压缸以完成放箱和拉箱操作的描述,图4所示的实施例能够实现一键式循序控制两个液压缸的操作。
33.除了上述简化的实施例以外,本领域技术人员同样能够预想到以类似的连接方式逐级增加对应数量的控制阀和先导阀,从而实现对四个以上的液压缸进行循序控制的气动控制系统。例如,可以在上述四个先导阀的基础上进一步增加对箱体后门的开启和关闭进行驱动的液压缸的先导阀,同时以上述相同的工作原理增加对应的控制阀从而实现对放下后滚轮支撑、解锁拉臂锁紧结构、滑移箱体、举升拉臂以放下箱体、开启箱体后门一系列操作及相应反向操作的一键式控制。而且需要说明的是,本实用新型并不仅限于对多个液压缸的先导阀实现正序和倒序的一键循序控制。例如,在仅设置单独一条输气管路以及一类控制阀的情况下,同样能够实现上述循序控制以反映本实用新型的构思。
34.为了进一步增加操作的安全性,本技术的气动控制系统还设置有信号指示灯,当拉臂锁紧结构解锁的情况下,该信号指示灯常亮;反之在拉臂锁紧结构被锁定的情况下,该信号指示灯常灭。操作者可根据信号指示灯的显示确定当前拉臂的操作状态。除此之外,气动控制系统还设置有紧急制动开关,当整个操作过程的任一阶段出现紧急情况或故障时,可通过按下紧急制动开关来切断主气控阀的输气管路,从而停止当前操作。当紧急情况和故障解除后,操作者可通过关断紧急制动开关恢复输气管路对加压气体的输送而继续当前操作。
35.结合以上对本实用新型的具体实施方式的描述可知,相比于传统的控制方式,采用如本实用新型的一键式气动控制系统能够获得如下技术效果:1)操作更加便捷,误操作概率大幅度降低,提高工作效率;2)控制系统的整体结构更加简洁,维修更加简单;3)系统的整体安全性得以增加。
36.尽管这里详细描述了本技术的特定实施方式,但它们仅仅是为了解释的目的而给出,而不应认为它们对本技术的范围构成限制。此外,本领域技术人员应当清楚,本说明书所描述的各实施例可以彼此相互组合使用。在不脱离本技术精神和范围的前提下,各种替换、变更和改造可被构想出来。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。