1.本发明涉及一种根据权利要求1的前序部分的用于在电梯系统的电梯井道中执行安装过程的安装设备和根据权利要求9的用于在电梯系统的电梯井道中执行安装过程的方法。
背景技术:
2.在建筑物中安装电梯系统,特别是在电梯井道内安装电梯系统的部件可能会导致高消耗和/或高成本,因为大量部件必须安装在电梯井道内不同的位置处。为此,例如,必须在井道壁的特定位置处钻出孔,并且必须将所谓的锚固螺栓引入所述钻出的孔中。
3.wo 2019/068469 a1描述了一种设备,借助该设备,电梯系统的提升高度可以通过驱动平台的提升来增加。
4.wo 2018/234351 a1描述了一种系统,该系统使得维护技术人员能够容易地进入电梯井道以执行维护工作和/或从损坏的电梯轿厢进行疏散。
5.wo 2017/016783 a1描述了一种用于在电梯系统的竖直延伸的电梯井道中执行安装过程的安装设备。该安装设备具有载体部件、工业机器人形式的机电安装部件以及移位部件和柔性承载装置的组合形式的移位系统。移位系统被设计用于在电梯井道内竖直地移位载体部件。安装部件被保持在载体部件上并且设计用于至少部分自动地执行在所述安装过程的范围内的安装步骤。通过使用这种安装设备,与由一个或多个装配工进行的纯手动安装相比,可以以更少的人工及成本耗费在电梯井中进行所述部件的安装。
技术实现要素:
6.相比之下,本发明的目的尤其是提出一种用于在电梯系统的电梯井道中执行安装过程的安装设备和方法,其允许以特别少的人工、时间和/或成本耗费来安装电梯系统。根据本发明,该目的通过具有权利要求1的特征的安装设备和具有权利要求9的特征的方法来实现。
7.所描述的实施例同等地涉及用于执行安装过程的安装设备和方法。换句话说,下面例如参考安装设备提到的特征也可以被实施为方法步骤,反之亦然。
8.根据本发明的用于在电梯系统的竖直延伸的电梯井道中执行安装过程的安装设备具有载体部件、机电安装部件和移位系统。移位系统被设计用于在电梯井道内竖直地移位载体部件。安装部件被保持在载体部件上并且被设计为至少部分自动地执行作为安装过程的一部分或者说在安装过程的范围内的安装步骤。根据本发明,移位系统被实施和布置成使得它也能够使载体部件在电梯井道内沿着移动方向水平地移位。
9.所提到的水平移位可以与竖直移位相结合,或者由不同的部分组成,这些部分至少还包括一个竖直移位。所以它不必完全水平地进行。
10.与根据wo 2017/016783 a1的安装设备相比,载体部件的上述水平移位使得安装
部件能够在电梯井道内的更大工作区域中执行安装步骤,而无需相对复杂且因此人工、时间和成本密集的整个安装设备的移位。载体部件水平移位的可能性也可用于在安装设备的工作区域至少保持不变的情况下减小安装部件的到达范围。与根据wo 2017/016783 a1的安装设备相比,安装部件和载体部件于是可以被制造得更小、更轻并且也更具成本效益。这也将使得能够简单且因此廉价地管理安装部件和载体部件。
11.电梯系统具有至少一个电梯轿厢,通过该电梯轿厢可以在电梯井道的轿厢竖直路径中运输人员和/或货物。电梯系统还可以在电梯井道内具有多于一个的轿厢竖直路径,其中,在每个轿厢竖直路径中,至少一个电梯轿厢能够竖直地移位。在这种情况下,电梯轿厢在各个轿厢竖直路径中的移位尤其是相互独立的。这种电梯系统通常也被称为所谓的电梯组。在完全组装或运行就绪状态下,电梯井道的轿厢竖直路径通常通过钢梁相互隔开,钢梁也称为所谓的“分隔梁”。例如,用于引导电梯轿厢和/或配重的所谓导轨然后附接到钢梁上。
12.载体部件可以以不同的方式设计。例如,载体部件可以设计为简单的平台、框架(gestell)、脚手架(ger
ü
st)、舱室或类似物。载体部件的尺寸应该被选择为,使得载体部件可以毫无问题地容纳在电梯井道中并且可以在该电梯井道内移位。
13.安装部件应该是机电式的,即它应该具有协同工作的机械、电子和信息技术元件或模块。例如,安装部件应该具有合适的机械结构,以便能够在例如安装步骤中操纵工具。例如,工具可以由所述机械结构适当地带到安装位置和/或在安装步骤期间被适当地引导。
14.机电安装部件的电子元件或模块可以用于例如以合适的方式操控(anzusteuern)或控制安装部件的机械元件或模块。这样的电子元件或模块因此可以用作例如用于安装部件的控制器。
15.此外,安装部件可以具有信息技术元件或模块,借助这些元件或模块,例如可以推导出工具将被带到的位置和/或工具在安装步骤期间将如何被致动和/或引导到那里。
16.机械、电子和信息技术元件或模块之间的相互作用应该以这样一种方式发生,即,在安装过程的范围内,至少一个安装步骤可以由安装设备部分自动地或全自动地执行。
17.安装设备尤其是具有控制安装设备的控制装置。它例如操控移位系统的致动器,所述致动器例如是可控的绞盘或电动机。此外,它还评估来自安装设备传感器的测量值,并与安装部件的电子元件和模块通信连接。
18.在载体部件上还可以设置引导部件,借助于该引导部件可以在电梯井道内的移位期间沿着电梯井道的一个或多个井道壁引导载体部件。引导部件例如可以设计为在电梯井道的井道壁上滚动的支撑滚轮。根据支撑滚轮在载体部件上的布置,可以提供一个到特别是四个支撑滚轮。为了在载体部件在电梯井道中竖直和水平移位的情况下都能够滚动,支撑滚轮被设计为特别是能够围绕垂直于相关竖井壁的轴线枢转。
19.移位系统尤其具有至少一个移位部件,所述移位部件例如呈绞盘或所谓的缆绳绞盘(seildurchlaufwinde)的形式。载体部件然后经由可弯曲的承载装置与至少一个移位部件连接并且可以通过承载装置的移位而在电梯井道中移位。承载装置可以具有呈绳、链或带形式的一根或多根平行布置的股线至少一个移位部件尤其以位置固定的方式布置在载体部件上方,使得载体部件通过承载装置悬挂在所述至少一个移位部件上。
也可以将至少一个移位部件布置在载体部件上并且将承载装置的与移位部件相对的端部固定在载体部件上方。在这种情况下,载体部件和至少一个移位部件挂在承载装置上。
20.除了移位系统之外,安装设备例如与根据wo 2017/016783 a1的安装设备相应地设计。
21.在本发明的一个实施例中,所述移位系统被实施和布置成,其使得载体部件能够
22.‑
在电梯井道中延伸的电梯系统的第一轿厢竖直路径中竖直地移位,
23.‑
从所述第一轿厢竖直路径水平移位到电梯系统的第二轿厢竖直路径,所述第二轿厢竖直路径在所述电梯井道中在移位方向上在所述第一轿厢竖直路径的旁边延伸,并且
24.‑
在所述第二轿厢竖直路径中竖直地移位。
25.以这种方式,通过安装设备,安装步骤可以在彼此相邻的轿厢竖直路径中以至少部分自动化的方式进行,而无需复杂的转换工作(umbauarbeiten)。这意味着可以以非常节省时间和成本效益的方式在电梯组的电梯井道中进行安装。
26.第一和第二轿厢竖直路径不一定必须彼此直接相邻(即彼此挨着)地布置。可以在第一和第二轿厢竖直路径之间布置一个或多个另外的轿厢竖直路径。
27.在本发明的一个实施例中,移位系统具有水平移动装置、仅一个移位部件、和(一个)承载装置。所述承载装置可借助于所述移位部件竖直地移位,载体部件通过所述承载装置和移位部件而与水平移动装置连接,并且所述移位组件能够与所述承载装置和载体部件一起水平地在移动方向上沿水平移动装置移位。
28.载体部件的水平移位因此可以容易且因此成本低廉地实现。
29.水平移动装置尤其具有轨道,例如呈双t形梁形式的轨道,其在载体部件上方、在移位方向上水平地定向地固定在电梯井道中。承载装置或移位部件经由耦接装置(例如滚轮装置)被保持在所述轨道上并且因此悬挂在其上。耦接装置可以通过合适的水平驱动器沿轨道移动,所述水平驱动器例如由电动机、齿形带和相应的带轮组合而成。与耦接装置一起,带有承载装置和载体部件的移动部件然后也被水平移动。
30.在本发明的一个实施例中,移位系统包括带有第一承载装置的第一移位部件和带有第二承载装置的第二移位部件。载体部件通过第一移位部件和第一承载装置悬挂在第一悬挂点处,并通过第二移位部件和第二承载装置悬挂在第二悬挂点处,其中,第二悬挂点被布置成在相对于第一悬挂点在移动方向上偏移。因此,通过第一承载装置和/或第二承载装置的移位,载体部件可以竖直地和在移动方向上水平地移位。
31.载体部件的水平移位因此可以容易且因此成本低廉地实现。
32.上述悬挂点尤其是相对电梯井道位置固定地布置。悬挂点可以例如设计为固定在电梯井道的井道壁上的钩子、在电梯井道中位置固定地布置的平台上的钩子或在电梯井道中位置固定地布置的托架上的钩子。移位部件特别是固定在它们各自的悬挂点处。例如,它们可以直接附接到悬挂点上,或者也可以通过一段具有特别是恒定的长度的承载装置附接在悬挂点上。这样,在载体部件移位的情况下,移位部件不必也被一起移位。
33.例如,第一移位部件设置在第一轿厢竖直路径的上部区域,第二移位部件设置在第二轿厢竖直路径的上部区域。当载体部件仅悬挂在第一承载装置上,因此没有显着的力通过第二承载装置作用在载体部件上,则载体部件通过第一承载装置的移位在第一轿厢竖直路径中竖直地移位。当载体部件仅悬挂在第二承载装置上,因此没有显着的力通过第一
承载装置作用在载体部件上,则载体部件通过第二承载装置的移位在第二轿厢竖直路径中竖直地移位。如果通过两个支撑装置将足够的力作用在载体部件上,则载体部件也可以水平地移位。当载体部件例如最初仅悬挂在第一承载装置上,然后通过第二承载装置所述载体部件被拉向第二悬挂点的方向,则载体部件在围绕第一悬挂点的圆形弧段中在第二悬挂点的方向上移位。载体部件因此既竖直地又水平地移位。通过彼此协调的以第二承载装置进行的拉动和第一承载装置的松弛,载体部件也可以仅水平地移位。
34.因此,两个悬挂点相互间的布置方式、特别是它们彼此之间的水平距离确定了载体部件可以在哪一区域水平移动。特别地,悬挂点大致布置在两个不同轿厢竖直路径的上部区域的中间。两个轿厢竖直路径可以直接彼此邻接地布置,也可以在它们之间布置一个或多个轿厢竖直路径。悬挂点特别布置在电梯井道的最外面的轿厢竖直路径上,从而载体部件可以在所有轿厢竖直路径中水平移位并且在所有轿厢竖直路径中竖直移位。
35.在本发明的一个实施例中,第一悬挂点设置在第一平台上,第一平台在顶部闭合第一轿厢竖直路径。第二悬挂点布置在第二平台上,第二平台在顶部闭合第二轿厢竖直路径。第一平台和第二平台尤其被设计为单独的平台。但也有可能将它们实现为一个单一的、通用的平台。
36.当电梯井到在顶部没有闭合,因此平台上方的建筑物仍在建造中时,所提到的平台尤其用作保护平台。在这种情况下,为了防止坠落物体这种类型的平台无论如何都是必要的,从而可以不费力地将悬挂点布置在平台上。
37.此外,在这种情况下,通常在电梯井中设置台阶或凹陷,平台可以轻松安全地支撑在台阶或凹陷上。为此,每个平台尤其具有至少一个、尤其是两个或四个可水平地延伸的支撑梁,借助这些支撑梁,平台可以在合适的上述台阶或凹陷形式的支撑位置处在竖直方向上得到支撑。还可以是,在安装设备被引入电梯井道之前,支撑元件被固定在、特别是被螺旋拧入到电梯井道的井道壁上,平台可以被支撑在所述支撑元件上。
38.在本发明的一个实施例中,第一悬挂点布置在第一托架上,该第一托架在第一轿厢竖直路径内被支撑在电梯井道的相对的井道壁上的。第二悬挂点则布置在第二托架上,该托架在第二轿厢竖直路径内被支撑在电梯井道的相对的井道壁上。
39.长形的所述托架布置在电梯井道中,特别是倾斜向上地定向。托架的下端例如支撑在电梯井道的门开口的边台上。上端靠在与所述门开口相对的井道壁上并因此支撑在该井道壁上。托架可以像例如根据wo 2019/052970 a1或us 8,646,224 b2的安装装置那样设计。
40.上述目的还通过一种用于在电梯系统的竖直延伸的电梯井道中执行安装过程的方法来实现,该方法至少具有以下步骤:
41.‑
将根据本发明的安装设备引入电梯井中;
42.‑
使安装设备的载体部件在电梯井道内受控地移位;
43.‑
借助于安装设备的安装部件,至少部分自动地执行在所述安装过程的范围内或作为所述安装过程的一部分的安装步骤。
44.在本发明的一个实施例中,安装设备的载体部件被引入电梯井道的第一轿厢竖直路径中。在被引入电梯井道后,它在第一轿厢竖直路径中竖直地移位,并在第一轿厢竖直路径内执行要执行的安装步骤。在第一轿厢竖直路径内完成安装步骤后,它从第一轿厢竖直
路径水平地移位到电梯系统的第二轿厢竖直路径中,该第二轿厢竖直路径在移动方向上在第一轿厢竖直路径旁边延伸。完成上述移位后,它在第二轿厢竖直路径内进行竖直移位,并在第二轿厢竖直路径内执行要执行的安装步骤。
45.该流程能够特别有效地执行电梯井道中所需的安装步骤。
46.在本发明的一个实施例中,在已经完成电梯井道的第一竖直部段的轿厢竖直路径内的安装步骤之后,安装设备移位到电梯井道的布置在第一竖直部段上方的第二竖直部段中,以至少部分自动地在那里执行进一步的安装步骤。
47.例如,可以通过建筑起重机来进行所述移位,该建筑起重机已经被提供以用于建造该具有电梯井道的建筑物。
48.当电梯井道高到安装设备不能在整个电梯井道内移位时,可以有利地使用该流程。特别地,当安装设备已经在电梯井道的第一竖直部段中使用并且在第一竖直部段上方仍在进行施工时,也可以有利地使用它。
49.需要指出的是,本发明的一些可能的特征和优点在此一方面参照根据本发明的安装设备的不同实施例而在另一方面参照根据本发明的方法的不同实施例进行描述。本领域技术人员认识到,可以以合适的方式组合、修改、转移或交换这些特征以达到本发明的进一步实施例。
附图说明
50.本发明的其它优点,特征和细节将通过下面的对实施例描述和附图给出,在附图中,相同或功能相同的元件设有相同的附图标记。附图只是示意性的,而不是按比例绘制的。其中,
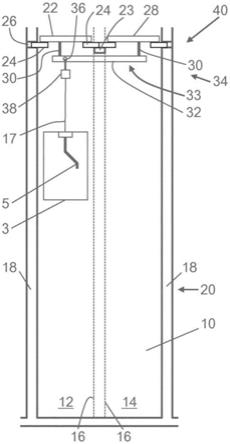
51.图1a示出了用于在具有两个轿厢竖直路径的电梯井道内执行安装过程的安装设备,其中,带有安装部件的载体部件被布置在第一轿厢竖直路径中,
52.图1b示出图1a中的安装设备,其中,带有安装部件的载体部件被布置在第一和第二轿厢竖直路径之间,
53.图1c示出从图1a和1b中的安装设备,其中,带有安装部件的载体部件被布置在第二轿厢竖直路径中,
54.图2在放大视图中示出了带有安装部件的载体部件,
55.图3a示出了在具有两个轿厢竖直路径的电梯井道中执行安装过程的安装设备的第二实施例,其中,带有安装部件的载体部件被布置在第一轿厢竖直路径中,
56.图3b示出了图3a中的安装设备,其中,带有安装部件的载体部件被布置在第一和第二轿厢竖直路径之间,
57.图3c示出了图3a和图3b的安装设备,其中,带有安装部件的载体部件被布置在所述第二轿厢竖直路径中,
58.图4a示出了用于在具有两个轿厢竖直路径的电梯井道的第一竖直部段中执行安装过程的安装设备
59.图4b示出了移位到电梯井道的布置在第一竖直部段上方的第二竖直部段中之后的图4a的安装设备。
具体实施方式
60.根据图1a至1c,未进一步地示出的电梯系统的竖直延伸的电梯井道10具有第一轿厢竖直路径12和直接布置在第一轿厢竖直路径12旁边的第二轿厢竖直路径14。两个轿厢竖直路径10、12在图1a至图1c中彼此通过两条虚线16分离。在电梯系统的完全组装状态下,在所述两条线16之间布置有竖直地间隔开的多个钢梁其将所述两个轿厢竖直路径12、14彼此分隔。然后导轨被固定到所述钢梁以及电梯井道10的与所述钢梁相对的井道壁18上,沿着每个轿厢竖直路径12、14,至少一个电梯轿厢在其在对应的轿厢竖直路径12、14中移位时在所述导轨上被引导。
61.电梯井道10的第一竖直部段20被示出在图1a至1c中。在上述第一竖直部段20之上,电梯井道10尤其还没有完全完成,而是仍在建设中。第一轿厢竖直路径12在顶部由一个第一平台22闭合,该第一平台用作所谓的保护平台。第一平台22保护第一轿厢竖直路径12以免从上方落下的部件的伤害。第一平台22具有总共四个可伸出的支撑梁(st
ü
tzbalken)24,其被安排在所述第一平台22的底部,并且可以水平地向井道壁18的方向伸出。为了将第一平台22引入到电梯井道10中,支承梁24可向内缩回到第一平台22下。朝向井道壁18的方向定向的支撑梁24被部分地布置在井道壁18中的凹部26中并因此从下部得到支撑。朝向第二轿厢竖直路径14的方向定向的其他两个支承梁24被搁置在支撑元件23(支撑元件23在引入第一平台22之前被固定在电梯井道10中)上并且因此从下部得到支撑。第二轿厢竖直路径14在顶部由第二平台28闭合,第二平台28被实施为与第一平台22类似并且也类似于第一平台22地从下部得到支撑。也可以将两个平台设计成一个单一的、共同的平台。
62.轨道32通过两个竖直延伸的保持杆30被保持在两个平台22、28的下方。其中,每个保持杆30被固定到平台22、28中的一个。轨道32被设计为例如双t形梁并水平地延伸。它从第一轿厢竖直路径12延伸到第二轿厢竖直路径14并因此在移动方向9上延伸。滚轮装置36形式的耦接装置在轨道32中被引导,耦接装置借助于一个未示出的水平驱动器来在轨道32上移动,并且从而可以在两个轿厢竖直路径12、14之间水平移动。
63.绞盘(winde)形式的移位部件38悬挂在滚轮装置36上。移位部件38可以使向下悬挂的、柔性的承载装置17竖直地移位,即向上拉动或使它向下。在承载装置17上悬挂有带有机电安装部件5的载体部件3,其将结合图2被更详细地描述。
64.轨道32、滚轮装置36和水平驱动器(未示出)一起形成水平移动装置33。保持杆30、轨道32、滚轮装置36、未示出的水平驱动器、单一的移位部件38和承载装置17一起形成移位系统34。平台22、28、移位系统34和载体部件3与布置在载体部件上的所有部件一起形成用于在电梯系统的竖直延伸的电梯井道中执行安装过程的安装设备40。
65.借助于移位部件38和承载装置17,如图1a所示,载体部件3可以在第一轿厢竖直路径12中移位。它可以被固定在不同的高度,并且至少部分自动地执行作为安装过程的一部分或者说在安装过程范围内的安装步骤。这可以是例如在电梯井道10的井道壁中钻出孔,并将锚定螺栓置入钻好的孔中。载体部件3和布置在其上的部件尤其可以像在wo 2017/016783 a1中所描述的那样设计。
66.因此,为了在电梯井道10中执行安装过程,安装设备40被首先引入到电梯井道10中。其中,如图1a所示,所述载体部件3被引入所述第一轿厢竖直路径12中。然后,执行所有要由安装设备40在第一轿厢竖直路径12中执行的安装步骤。为此,所述载体部件3借助于移
位部件38被竖直移位到所需的高度。第一轿厢竖直路径12内的安装步骤完成后,载体部件3被水平地移位到所述第二轿厢竖直路径14。为此,所述滚轮装置36借助于水平驱动装置沿着轨道32在第二轿厢竖直路径14的方向上(因此在移动方向9上)移位。与滚轮装置36一起,移位部件38、承载装置17、载体部件3以及所有布置在载体部件上的部件也都在第二轿厢竖直路径14的方向上被移动或移位。
67.在图1b中,中间位置被示出,其中,滚轮装置36和所述挂在其上的部件被布置在第一轿厢竖直路径12和第二轿厢竖直路径14之间。在图1c中,所描述的水平移位结束后的状态被示出。载体部件3从现在开始布置在第二轿厢竖直路径14中。上述水平移位后,执行所有要由安装设备40在第二轿厢竖直路径14中执行的安装步骤。为此,所述载体部件3再次借助于移位部件38竖直地移位到所需的高度。
68.电梯井道也可以具有多于两个的轿厢竖直路径,例如四个或六个。在这种情况下,水平移动装置被这样实施使得所述载体部件能够水平地移位到两个最外面的轿厢竖直路径中。载体部件从而可以在所有轿厢竖直路径中执行安装步骤。
69.图2以相对于图1a至1c放大且更详细的图示示出了载体元件3及布置在其上的部件。载体部件3被设计为笼状的框架,其中,若干水平和竖直延伸的杆形成了机械上可承载负荷的或者说耐用的(mechanisch belastbare)结构。杆的尺寸和可能的所提供的任何支撑被设计成使得所述载体部件3能够承受在安装部件5所执行的作为电梯井道10的安装过程的一部分或者说在安装过程范围内的各种安装步骤期间可能出现的力。
70.在笼状的载体部件3的顶部,附接有保持绳索27,保持绳索可与承载装置17连接。通过在电梯井道10内使承载装置17移位,也就是说例如通过使可弯曲的承载装置17缠绕到移位部件38上或从移位部件38解开缠绕,竖直悬挂在电梯井道10内的载体元件3可由此被竖直地移位。
71.在载体部件3上可以设置进一步的引导部件,引导部件例如是支撑滚子25的形式,在其帮助下,载体部件3可以在其在电梯井道10内移位期间被沿着电梯井道10的一个或多个井道壁18引导。为了在载体部件3在电梯竖井10中竖直和水平移位的情况下都能够滚动,支撑滚子25被设计为可绕与相关井道壁18垂直的轴线枢转。
72.固定部件19被设置在载体部件3的侧部。在所示的例子中,固定部件19被设计为具有在竖直方向上延伸的杆,其能够在水平方向上相对于所述载体部件3的框架移动。为此,所述杆可例如通过可锁定的液压缸或自锁式的电机主轴被附接到载体部件3上。当固定部件19的杆从载体部件3的框架移开,它侧向地移向电梯井道10的井道壁18中的一个。替代地或另外地,在承载部件3的后侧,推杆(stempel)可以向后移动,以将承载部件3撑或者说楔(verspreizen)在电梯竖井10中。以这种方式,所述载体部件3可被填充(verstemmt)在电梯井道10内,从而例如在执行安装步骤的期间将载体部件3在侧向上固定在电梯井道10内。
73.在示出的实施例中,机电安装部件5借助工业机器人7来实现。应当指出的是,机电安装部件5也可以以其它方式来实现,例如以不同设计的致动器、操纵器、效应器等。特别地,安装部件可以具有特别适用于电梯设备的电梯井道10内的安装过程的机电装置或机器人。
74.在示出的例子中,工业机器人7配备有多个可绕枢转轴线枢转的机器人手臂。例如,工业用机器人可以具有至少六个自由度,即,由工业机器人7引导的安装工具9可以以六
个自由度运动,即,例如以三个旋转自由度和三个平移自由度运动。例如,工业机器人可以被设计为竖直关节臂机器人(vertikal
‑
knickarmroboter)、水平关节臂机器人或scara机器人或笛卡尔机器人或龙门式机器人(portalroboter)。
75.机器人可以在其自由支撑端8与各种安装工具9耦接。所述安装工具9可以在他们的设计和预期用途方面有所不同。所述安装工具9可以以这样的方式被保持在载体部件3上,使得工业机器人7的自由支撑端8可被移动到它们,并且可以与它们中的一个耦接。为此,工业机器人7可以具有例如工具更换系统,所述工具更换系统被设计成能够处理至少几个这样的安装工具9。
76.所述的安装工具9的一个可以被设计为类似于钻机的钻孔工具。通过工业机器人7与这样的钻孔工具的耦接,安装部件5可以被配置为能够至少部分地自动控制地钻孔,例如在电梯井道10的井道壁18之一中。钻孔工具在此可以由工业机器人7例如以这样的方式移动和处理,使得带有钻头的钻孔工具在例如电梯井道10的壁18的混凝土中将孔钻在指定位置处,稍后,例如,可以将紧固螺钉或锚定螺栓插入其中以固定紧固元件。
77.另一个装配工具9可以被设计为拧紧装置,以便至少部分自动地将螺钉拧入电梯井道10的井道壁18中先前钻出的孔中。
78.在载体部件3上还可以设置储存部件11。该储存部件11可以用来存储要安装的部件13并使其可被用于安装部件5。在所示的例子中,储存部件11被布置在所述载体部件3的框架的下侧区域中,并且容纳了例如呈不同异型件形式的各种部件13,所述部件将在电梯井道10内被安装在井道壁18上,以便例如能够将电梯系统的导轨固定在那里。在储存部件11中还可以存储和提供螺钉或锚定螺栓,借助安装部件5,所述螺钉或锚定螺栓可以被拧入或引入壁18中预制的孔中。
79.为了能够将载体部件3精确地定位在电梯井道10内,也可以设置定位部件21。该定位部件21可以例如固定安装在载体部件3上,并因此可以当载体部件3在电梯井道内移动时与载体部件3一起移动。替代地,定位部件21也可以不依赖于载体部件3地布置在电梯井道10内的另一位置处,并从那里确定载体部件3的当前位置。
80.所述安装设备的没有示出的控制器可以对来自定位部件21的信号进行评估,并基于这些信号来确定相对于电梯井道10内的目标定位的实际定位。在此基础上,控制器然后可以例如首先使或让载体部件3在第一电梯井道10内移动至期望高度。随后,控制器可以在考虑到所确定的实际位置适当地控制安装部件5,以例如在电梯井道10中所希望的位置处钻孔、拧上螺钉和/或最终对部件13进行安装。
81.图3a至3c示出了相对图1a至1c的安装设备40来说替代性的安装设备140。电梯井道10、载体部件3及所有布置在载体部件3中的部件是不变的,因此以下主要讨论移位系统的差异。
82.根据图3a至3c,所述安装设备140的移位系统134具有第一移位部件138和第二移位部件139,所述第一移位部件138是具有第一承载装置117的绞盘的形式,第二移位部件139是具有第二承载装置115的绞盘的形式。两个承载装置115、117与载体部件3连接。载体部件3因此可以挂在两个承载装置115、117上。
83.第一移位部件138被固定在第一长形托架142的第一悬挂点141上,第一长形托架被布置在第一轿厢竖直路径12的上侧,并在其下端144处被支撑在电梯井道10的第一门开
口148的门槛146上。其中,所述门槛146可以被看作是井道壁18的一部分。第一托架142的上端150抵靠与第一门开口148相对的井道壁18,并因此支撑在该井道壁18上。所述托架例如可实施为像根据wo 2019/052970 a1或us 8646224 b2的安装装置那样。第二移位部件139在第二轿厢竖直路径14中被布置在第二长形托架152的第二悬挂点143处。第二托架152被构造成与所述第一托架142相同并与第一托架142类似地被布置在第二门开口149和相对的井道壁18之间。由此,第二悬挂点143被布置成在移动方向9上相对于所述第一悬挂点141偏移。
84.在图3a所示的状态中,载体部件3完全悬挂在第一承载装置117上,第二承载装置115在载体部件3上不施加任何显著的力。载体部件3可由此通过第一承载装置117的移位而在电梯井道10的第一轿厢竖直路径12中竖直地移位。如果载体部件3要从图3a中所示的位置开始进一步向下移位,仅第二承载装置115必须相应地被释放,即被从第二移位部件139解开缠绕。这样,如结合图1a所描述的,可以在第一轿厢竖直路径12中执行必要的安装步骤。
85.在第一轿厢竖直路径12中的安装步骤完成后,载体部件3也被水平地移位到所述第二轿厢竖直路径14中。为此,它借助于第二承载装置115被在第二轿厢竖直路径14的方向上拉动。如果第一承载装置117既不缩短也不加长,所述载体部件3沿圆弧移动围绕第一移位部件138。第一移位部件138也可以以这样的方式操纵,即它使第一承载装置117匹配第二承载装置115的缩短而缩短,从而产生所述载体部件3的仅水平的移位。
86.载体部件3在两个轿厢竖直路径12、14之间的相应的中间位置被示出在图3b中。当载体部件3竖直地布置在第二移位部件139下面时,水平移位结束。此状态示于图3c。载体部件3然后只悬挂在第二支撑装置115上,所述第一承载装置117在载体部件3上不施加任何显著的力。载体部件3由此可通过第二承载装置115的移位而在在电梯井道10的第二轿厢竖直路径14中竖直地移位。以这种方式,如结合图1c中所描述的,可在第二轿厢竖直路径14中执行必要的安装步骤。
87.移位部件138、139和承载装置115、117从而一起形成移位系统134,移位系统使载体部件3既能够在两个轿厢竖直路径12、14内并且进而在电梯井道10内竖直地移动,还能够沿移动方向9,即,在两个轿厢竖直路径12、14之间水平地移动。
88.图4a示出了一种状态,在这种状态中,电梯井道10的第一竖直部段20的在轿厢竖直路径12、14中的所有安装步骤已经完成。现在开始安装要在电梯井道10的布置在第一竖直部段20上方且构造相同的第二竖直部60中继续进行。为此,整个安装设备140在未示出的建筑起重机的帮助下被从第一竖直部段20移位到第二竖直部段60中。移位已完成之后,安装步骤可以在第二竖直区段60的两个轿厢竖直路径12、14中以类似的方式进行。其中,安装特别是在第二轿厢竖直路径14中开始,然后在第一轿厢竖直路径12中继续。
89.与此类似,安装设备40也可以从第一竖直部段移位到电梯井道的布置在第一竖直部段上方的第二竖直部段中。
90.当然,根据图1a至1c的水平移位装置33也可以由根据图3a至3c的托架142、152保持,并且根据图3a到3c的移位部件138、139也可以固定到根据图1a到1c的平台22、28上。
91.最后,应该指出的是,像“具有”,“包括”等的术语不排除任何其他的元件或步骤,并且像“一”或“一个”这样的术语不排除多个。此外,应该指出的是,已经参照上述实施例中
的一个实施例描述的特征或步骤也可以与上述已描述实施例的其他实施例的其它特征或步骤组合使用。权利要求中的参考符号不应当被视为限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

