1.本实用新型涉及链斗卸船机安全控制装置技术领域,尤其涉及一种轨道移动式链斗连续卸船机防撞自动卸料系统。
背景技术:
2.目前,国内外散货码头上应用的轨道移动式链斗连续卸船机,控制方式均为操作人员的手动操作,或者是手动设定教学路径后沿预定路径卸料的半自动控制方式。期间都需要人工判断卸料装置是否触碰到船舱的舱底或舱壁,从而限制了链斗式卸船机实现完全自动化控制。
3.为了克服上述存在的不足,考虑采用超声波探测装置,用于探查船舱的舱底或舱壁的精确位置,将信号反馈给设备的主控系统,以实现自动卸料,并为整机自动化控制提供了必要条件。其工作原理是,散装物料的堆积密度比船舱的金属面板密度小很多,利用其分界面对声波的反射来计算料层的厚度。
技术实现要素:
4.根据现有技术中存在的问题,本实用新型提供了一种轨道移动式链斗连续卸船机防撞自动卸料系统,旨在解决现有自动卸料系统需要人工判断触底、触壁的问题。
5.为实现上述目的,本实用新型的技术方案为:一种轨道移动式链斗连续卸船机防撞自动卸料系统,包括链斗连续卸船机,所述链斗连续卸船机包括送料通道及框架、输送链条、链斗、取料头支架、后链轮、前链轮;
6.所述后链轮与前链轮之间的输送链条上方固定设置有超声波探测装置,前链轮所在位置的输送链条后方固定设置有超声波探测装置;所述超声波探测装置由罩壳、探头与盖板构成;
7.还包括单片机控制模块,用于控制超声波信号发送,及根据超声波数据处理决策模块的计算结果与plc程序中预设最小安全距离进行比对,并控制警报装置;
8.超声波数据处理决策模块连接单片机控制模块,用于根据接收超声波信号计算得出探测距离值;
9.超声波信号发送模块连接单片机控制模块,用于发送超声波信号;
10.超声波信号接收模块连接单片机控制模块,用于接收超声波信号。
11.优选的,所述后链轮为安装于取料头支架的固定链轮,前链轮为张紧链轮,还包括用于安装张紧链轮的张紧机构,张紧机构固定于取料头支架;两个超声波探测装置通过罩壳及安装螺钉固定于张紧机构下表面与前端面。
12.优选的,所述警报装置为警报灯。
13.本实用新型的有益效果:通过自动检测、信号反馈来判断安全距离,为全自动化控制提供安全基础。
附图说明
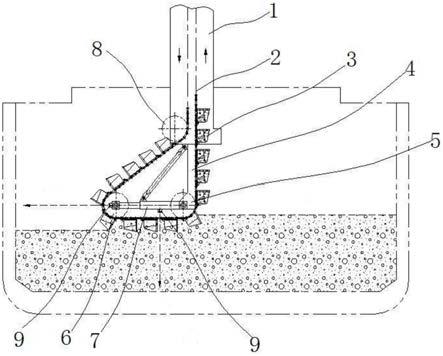
14.图1为链斗取料工作示意图。
15.图2为超声波探测装置的结构示意图。
16.图3为探测控制原理图。
17.图4为探测示意图。
18.其中:框架1、输送链条2、链斗3、取料头支架4、后链轮5、前链轮6,张紧机构7,导向链轮8,超声波探测装置9,罩壳91,探头92,盖板93,安装螺钉94,单片机控制模块95,超声波数据处理决策模块96,超声波信号发送模块97,超声波信号接收模块98。
具体实施方式
19.如图1、2、3所示,一种轨道移动式链斗连续卸船机防撞自动卸料系统,包括链斗连续卸船机,所述链斗连续卸船机包括送料通道及框架1、输送链条2、链斗3、取料头支架4、后链轮5、前链轮6;
20.所述后链轮5与前链轮6之间的输送链条2上方固定设置有超声波探测装置9,前链轮6所在位置的输送链条2后方固定设置有超声波探测装置9;所述超声波探测装置9由罩壳91、探头92与盖板93 构成;所述后链轮5为安装于取料头支架4的固定链轮,前链轮6为张紧链轮,还包括用于安装张紧链轮的张紧机构7,张紧机构7固定于取料头支架4;两个超声波探测装置9通过罩壳91及安装螺钉94 固定于张紧机构6下表面与前端面;
21.还包括单片机控制模块95,用于控制超声波信号发送,及根据超声波数据处理决策模块96的计算结果与plc程序中预设最小安全距离进行比对,并控制警报灯;
22.超声波数据处理决策模块96连接单片机控制模块95,用于根据接收超声波信号计算得出探测距离值;
23.超声波信号发送模块97连接单片机控制模块95,用于发送超声波信号;
24.超声波信号接收模块98连接单片机控制模块95,用于接收超声波信号。
25.关于本实用新型的链斗连续卸船机,首先通过人工操作,将轨道移动式链斗连续卸船机的取料头部送入船舱并触及物料表面,然后可以通过人工或自动控制的方式取料。具体实施方式是,送料通道及框架1作为链斗式卸船机取料部件的主体结构,承接取料头与上部结构的连接,同时提供输送链条2、链斗3及物料的输送通道。安装在取料部件顶部的驱动机构,通过驱动输送链条2、链斗3在送料通道及框架1内上下循环运转,以达到将船舱内的物料送至上部输送皮带机并直至送上码头的卸料目的。
26.而送料通道及框架1下端设置有取料头支架4,用于支承固定链轮及张紧机构7,在张紧机构7的前端及下侧面分别安装了水平及垂直的超声波探测装置9,水平向用于探测链斗到船舱舱壁的距离,垂直向用于探测链斗到船舱舱底的距离,其工作原理一致,只是安装位置的区别。
27.罩壳91及盖板93用于支承及保护探头92,探头92为探测装置的核心元件,用于发射超声波信号及接收反馈信号来准确判定目标位置。
28.基于物料与货船壳体材质特性的差异,超声波在不同介质上的传播速度是不同的。plc程序中设超声波在物料中的传播速度为t
29.(t值根据不同物料,可在plc中更改编辑),单片机发出信号,由超声波测距传感器
上超声波信号发送模块97发出,超声波信号接收模块接收98,经超声波数据处理决策模块96,计算得出探测距离值l1,并与plc程序中预设最小安全距离l比对(如图4);通过plc上单片机控制模块95,对此给出处理信号如下;
30.一:l1<l,系统给于警报提示信号(外置警报灯等);
31.二:l1≥l,系统不给于警报,正常作业。
32.综上,作业人员通过警报指示灯判别取料头与舱底(仓壁)是否在安全作业距离,从而可以减少取料头与船底与仓壁刮擦磕碰的概率,提升卸料作业的服务质量,也减少了作业过程中对船体的损伤。
33.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种轨道移动式链斗连续卸船机防撞自动卸料系统,包括链斗连续卸船机,所述链斗连续卸船机包括送料通道及框架(1)、输送链条(2)、链斗(3)、取料头支架(4)、后链轮(5)、前链轮(6);其特征在于,所述后链轮(5)与前链轮(6)之间的输送链条(2)上方固定设置有超声波探测装置(9),前链轮(6)所在位置的输送链条(2)后方固定设置有超声波探测装置(9);所述超声波探测装置(9)由罩壳(91)、探头(92)与盖板(93)构成;还包括单片机控制模块(95),用于控制超声波信号发送,及根据超声波数据处理决策模块(96)的计算结果与plc程序中预设最小安全距离进行比对,并控制警报装置;超声波数据处理决策模块(96)连接单片机控制模块(95),用于根据接收超声波信号计算得出探测距离值;超声波信号发送模块(97)连接单片机控制模块(95),用于发送超声波信号;超声波信号接收模块(98)连接单片机控制模块(95),用于接收超声波信号。2.根据权利要求1所述一种轨道移动式链斗连续卸船机防撞自动卸料系统,其特征在于,所述后链轮(5)为安装于取料头支架(4)的固定链轮,前链轮(6)为张紧链轮,还包括用于安装张紧链轮的张紧机构(7),张紧机构(7)固定于取料头支架(4);两个超声波探测装置(9)通过罩壳(91)及安装螺钉(94)固定于张紧机构(7)下表面与前端面。3.根据权利要求1所述一种轨道移动式链斗连续卸船机防撞自动卸料系统,其特征在于,所述警报装置为警报灯。
技术总结
本实用新型公开了一种轨道移动式链斗连续卸船机防撞自动卸料系统,包括链斗连续卸船机,所述链斗连续卸船机包括送料通道及框架、输送链条、链斗、取料头支架、后链轮、前链轮;所述后链轮与前链轮之间的输送链条上方固定设置有超声波探测装置,前链轮所在位置的输送链条后方固定设置有超声波探测装置;所述超声波探测装置由罩壳、探头与盖板构成;还包括单片机控制模块,用于控制超声波信号发送,及根据超声波数据处理决策模块的计算结果与PLC程序中预设最小安全距离进行比对,并控制警报装置。置。置。
技术研发人员:周正
受保护的技术使用者:杭州云天港口机械装备有限公司
技术研发日:2020.12.22
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

