1.本技术涉及登高车的领域,尤其是涉及一种登高车用辅助装置。
背景技术:
2.登高车是市政中常用的一种登高作业设备。
3.相关技术中,如图1所示,登高车包括车体100和设置有车体100上的工作台200,工作台200通过升高组件与车体100连接,以使升高组件带动工作台200向远离地面的方向移动。工作人员需要对于较高位置处进行工作时,需要从车体100攀爬至工作台200上,然后控制升高组件,使得工作台200向远离地面的方向移动,以便于工作人员高空作业。
4.针对上述中的相关技术,发明人认为存在有如下缺陷,一般升高组件采用液压缸,而液压缸的缸体本身存在一定的高度,因此工作台与车体之间初始的高度会较高,从而导致工作人员攀爬至工作台上较为不便。
技术实现要素:
5.为了便于工作人员攀爬至工作台上,本技术提供一种登高车用辅助装置。
6.本技术提供的一种登高车用辅助装置,采用如下的技术方案:
7.一种登高车用辅助装置,包括工作台、第一支撑架以及沿工作台周向设置的多个第二支撑架,多个第二支撑架依次固定连接,且第二支撑架与工作台固定连接,所述第一支撑架位于首尾两第二支撑架之间,所述第一支撑架与工作台远离车体的一端转动连接,以使第一支撑架远离工作台的一端向靠近或远离车体的方向转动,并与工作台侧面可抵触,所述工作台上设置有用于驱动第一支撑架转动的驱动组件。
8.通过采用上述技术方案,工作人员需要爬上工作台上,控制驱动组件,使得驱动组件带动第一支撑架自由端向靠近车体的方向转动,并使第一支撑架与工作台侧面抵触,从而便于工作人员踩在第一支撑架上攀爬至工作台上,以实现便于工作人员攀爬至工作台上的目的。
9.可选的,所述第一支撑架上固定连接有转轴,所述转轴与工作台转动连接,所述驱动组件包括驱动电机、驱动轮、驱动皮带和传动轮,所述传动轮与转轴同轴固定连接,所述驱动电机的输出轴与驱动轮同轴固定连接,所述驱动轮与传动轮通过驱动皮带传动连接。
10.通过采用上述技术方案,启动驱动电机,使得驱动电机带动驱动轮转动,从而使得驱动皮带带动传动轮使得转轴带动第一支撑架转动,从而实现第一支撑架自由端向靠近或远离车体方向的转动。
11.可选的,所述第一支撑架包括两根竖杆和多根横杆,多根所述横杆平行间隔设置在两根竖杆之间,且横杆两端分别与对应侧的竖杆固定连接,所述竖杆与转轴固定连接。
12.通过采用上述技术方案,横杆与竖杆的设置使得第一支撑架呈梯子状设置,从而进一步便于工作人员利用第一支撑架攀爬至工作台上。
13.可选的,所述工作台上固定连接有支撑板,所述第一支撑架与支撑板可抵触。
14.通过采用上述技术方案,支撑板的设置为第一支撑架提供了部分支撑力,从而减小了第一支撑架与工作台连接位置受到的力,从而提高了第一支撑架与工作台连接的稳定性。
15.可选的,第一支撑架上固定连接有定位板,所述定位板与支撑板可抵触。
16.通过采用上述技术方案,定位板的设置,使得第一支撑架与竖直方向倾斜设置,从而进一步便于工作人员利用第一支撑架攀爬至工作台上。
17.可选的,所述定位板设置有多块,多块定位板沿远离转轴的方向依次设置,沿远离转轴的方向,多块定位板伸出第一支撑架的长度依次增加。
18.通过采用上述技术方案,多块定位板的设置提高了第一支撑架与支撑板抵触的稳定性。
19.可选的,所述第一支撑架相邻的第二支撑架上固定连接有第一锁定块,所述第一锁定块一端与第二支撑架固定连接,另一端向靠近车体的方向弯折形成定位沿,所述竖杆上设置有第二锁定块,所述第二锁定块沿竖杆长度方向与竖杆滑移连接,所述第二锁定块与定位沿靠近第二支撑架的侧面可抵触,所述竖杆上设置有用于调控第二锁定块滑移的调控件。
20.通过采用上述技术方案,向第一支撑架自由端远离车体的方向转动第一支撑架,控制调控件,使得第一支撑架带动第二锁定块转动,直至控制调控件,第二锁定块与定位沿靠近第二支撑架的侧面抵触,从而使得第一支撑架在第二锁定块与第一锁定块不易下不易继续发生转动,以减小驱动电机的输出轴受到的力。
21.可选的,所述调控件为调控弹簧,调控弹簧一端与竖杆连接,另一端与第二锁定块连接,在调控弹簧弹力作用下,所述第二锁定块与第一锁定块靠近地面的侧面抵触,并与定位沿靠近第二支撑架的侧面抵触,所述第二锁定块靠近第二支撑架的侧面设置为斜面,且斜面沿远离转轴的方向由靠近向远离第二支撑架的方向倾斜。
22.通过采用上述技术方案,启动驱动电机,驱动电机带动第一支撑架转动,第二锁定块逐渐与定位沿抵触,由于第二锁定块靠近第二支撑架的侧面设置为斜面,从而使得第二锁定块在定位沿作用下发生滑移,调控弹簧发生形变,当第一支撑架带动第二锁定块转动至与定位沿的抵触状态解除时,第二锁定块在调控弹簧恢复形变力的作用下移动至与第二锁定块靠近地面的侧面抵触的位置,从而使得第一支撑架在第二锁定块和第一锁定块作用下不易发生转动。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.第一支撑架与工作台的转动连接,便于工作人员将第一支撑架转动至合适角度,以便于工作人员通过踩踏第一支撑架攀爬至工作台上,从而实现便于工作人员攀爬至工作台上的目的;
25.2.支撑板的设置,提高了第一支撑架辅助工作人员攀爬时的稳定性;
26.3.定位板的设置,使得第一支撑架倾斜设置,从而进一步实现便于工作人员攀爬至工作台上的目的。
附图说明
27.图1是相关技术的附图;
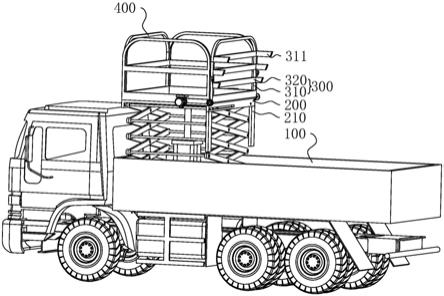
28.图2是本技术实施例的整体结构示意图;
29.图3是本技术实施例的工作台与第一支撑架、第二支撑架的结构示意图;
30.图4是图3中a部分的放大示意图。
31.附图标记说明:100、车体;200、工作台;210、支撑板;300、第一支撑架;310、竖杆;311、定位板;312、滑槽;313、第二锁定块;314、调控弹簧;320、横杆;330、转轴;400、第二支撑架;410、第一锁定块;411、定位沿;500、驱动组件;510、驱动电机;520、驱动轮;530、驱动皮带;540、传动轮。
具体实施方式
32.以下结合附图2
‑
4对本技术作进一步详细说明。
33.本技术实施例公开一种登高车用辅助装置。参照图2,辅助装置包括工作台200,工作台200的横截面为矩形。辅助装置还包括三个第二支撑架400,三个第二支撑架400沿工作台200周向依次设置,且第二支撑架400与工作台200固定连接,相邻第二支撑架400之间固定连接,本实施例中第二支撑架400与工作台200之间以及相邻第二支撑架400之间均采用焊接。
34.辅助装置还包括设置在首尾两个第二支撑架400之间的第一支撑架300,第一支撑架300包括两根竖杆310和多根横杆320。两根竖杆310平行间隔设置,且两根竖杆310分别与一个第二支撑架400抵触。多根横杆320平行间隔设置在两根竖杆310之间,且横杆320两端均与对应侧的竖杆310固定连接。本实施例中横杆320与竖杆310之间的固定连接采用焊接,以使第一支撑架300呈梯子状。
35.参照图3,靠近工作台200的一根横杆320与工作台200通过转轴330转动连接,工作台200上设置有用于驱动第一支撑架300转动的驱动组件500。驱动组件500设置有两组,且两组驱动组件500分别与转轴330两端连接。驱动组件500包括驱动电机510、驱动轮520、驱动皮带530和传动轮540。驱动电机510与工作台200通过螺栓固定连接。驱动轮520与驱动电机510的输出轴同轴固定连接,传动轮540与转轴330同轴固定连接,驱动皮带530套设在驱动轮520和传动轮540外侧,以实现驱动轮520与传动轮540之间的传动连接,以使得驱动轮520转动时带动传动轮540转动。
36.参照图2和图3,启动驱动电机510,使得驱动电机510带动驱动轮520转动,从而使得传动轮540转动并带动转轴330使得第一支撑架300自由端向靠近车体100的方向转动,从而使得第一支撑架300可辅助工作人员攀爬至工作台200上,实现便于工作人员攀爬至工作台200上的目的。
37.为了提高工作人员踩踏在第一支撑架300上时第一支撑架300的稳定性,工作台200上固定连接有两块支撑板210,两块支撑板210与竖杆310位置一一对应,且本实施例中支撑板210与工作台200采用焊接的方式固定。两根竖杆310上均固定连接有多个定位板311,定位板311与支撑板210可抵触,沿远离转轴330的方向,多块定位板311依次设置,且定位板311伸出第一支撑架300的长度逐渐增大,从而使得第一支撑架300转动至定位板311与支撑板210抵触时,第一支撑架300沿靠近车体100的方向沿靠近向远离转轴330的方向倾斜,从而便于工作人员利用第一支撑架300攀爬至工作台200上。
38.参照图3和图4,为了使得第一支撑架300转动至竖杆310与第二支撑架400抵触的
位置时,第一支撑架300与第二支撑架400相对位置的稳定性,同时减小了驱动电机510的输出轴上受到的力,因此与第一支撑架300相邻的两第二支撑架400上均固定连接有第一锁定块410,第一锁定块410一端与对应的第二支撑架400固定连接,另一端向靠近车体100的方向弯折以形成定位沿411。两根竖杆310上均开设有沿其长度方向的滑槽312,滑槽312为t形槽,第一支撑架300上设置有与滑槽312形状适配的第二锁定块313,且第二锁定块313与滑槽312滑移连接。竖杆310上设置有用于调控第二锁定块313滑移的调控件。调控件为调控弹簧314,调控弹簧314设置在滑槽312内且一端与第二锁定块313固定连接,另一端与滑槽312侧壁固定连接。当第一支撑架300转动至竖杆310与第二支撑架400抵触时,在调控弹簧314弹力作用下,第二锁定块313与第一锁定块410靠近车体100的侧面抵触,且第二锁定块313与定位沿411靠近第二支撑架400的侧面抵触。为了便于第二锁定块313与第一锁定块410和定位沿411抵触状态的形成,第二锁定块313靠近第二支撑架400的侧面设置为斜面,且斜面沿远离转轴330的方向由靠近向远离第二支撑架400的方向倾斜。
39.启动驱动电机510,使得转轴330带动第一支撑架300转动,当第一支撑架300转动至第二锁定块313与定位沿411抵触时,第一支撑架300继续转动,定位沿411对第二锁定块313产生沿竖杆310长度方向的分力,从而使得第二锁定块313沿滑槽312向靠近转轴330的方向滑移,调控弹簧314被压缩,当第一支撑架300转动至第二锁定块313与定位沿411脱离时,第二锁定块313在调控弹簧314恢复形变力的作用下向远离转轴330的方向滑移,直至第二锁定块313远离转轴330的侧面与第一锁定块410靠近转轴330的侧面抵触,以达到使第一支撑架300不易继续转动的目的。
40.本技术实施例一种登高车用辅助装置的实施原理为:工作人员需要攀爬至工作台200上时,启动驱动电机510,使得驱动电机510带动驱动轮520使得传动轮540带动转轴330转动,第一支撑架300自由端向靠近车体100的方向转动,直至定位板311与支撑板210抵触,关闭驱动电机510,工作人员可从第一支撑架300作用下攀爬至工作台200上,从而实现便于工作人员攀爬至工作台200上的目的。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

