1.本实用新型涉及自动驾驶车辆充电技术领域,具体涉及一种自动驾驶车辆的充电桩。
背景技术:
2.充电桩是为以电能为动力的车辆提供充电服务的设备,其主要分为落地式充电桩和挂壁式充电桩。随着科技的发展,自动驾驶车辆作为服务机器人在越来越多的领域被应用,其对于充电桩的需求也随之增加,现有的充电桩往往不能移动,只能在车辆以特定的姿态进入特定的区域时,充电桩才能够顺利为车辆进行充电。若是自动驾驶的车辆,现有的充电桩对于自动驾驶车辆的定位导航精度要求很高,为了方便自动驾驶车辆的充电,充电桩需要提供一定的辅助功能。
技术实现要素:
3.本实用新型的目的在于提供一种自动驾驶车辆的充电桩,用于辅助自动驾驶车辆与充电桩的自动连接,解决了自动驾驶车辆自动充电时与充电桩对接准确度不高的问题。
4.为了解决上述问题,本实用新型采用以下技术方案:
5.本实用新型提供了一种自动驾驶车辆的充电桩,包括底座、立柱、第一充电臂、第二充电臂、充电接口、第一电机、第二电机和第三电机,立柱可伸缩设置在底座上,第一充电臂可伸缩设置在立柱顶端且伸缩方向与立柱垂直,第二充电臂可伸缩设置在第一充电臂上且伸缩方向与第一充电臂的伸缩方向垂直,第一充电臂和第二充电臂用于接近待充电的自动驾驶车辆,充电接口设置在第二充电臂上,充电接口用于与待充电的自动驾驶车辆的充电接口连接,第一电机设置在底座上用于控制立柱上下伸缩和左右旋转,第二电机设置在第一充电臂和立柱的连接处用于控制第一充电臂的伸缩,第三电机设置在第二充电臂上用于控制第二充电臂的伸缩。
6.本实用新型的有益效果为:
7.通过电机控制立柱的伸缩和旋转以及两个充电臂的伸缩,能够增加充电桩为自动驾驶车辆充电的灵活性以及准确程度,增大了自动驾驶车辆的充电区域的范围,解决了自动驾驶车辆自动充电时与充电桩对接准确度不高的问题。
8.进一步的,第二充电臂上还设置有用于辅助待充电的自动驾驶车辆与充电接口对接的红外摄像头;通过红外摄像头的设置可以提升自动驾驶车辆与充电桩自动连接时的准确度。
9.进一步的,第二充电臂上还设置有用于辅助待充电的自动驾驶车辆与充电接口对接的激光测距模块;通过激光测距模块的设置可以提升自动驾驶车辆与充电桩自动连接时的准确度。
10.进一步的,立柱上还设置有用于辅助待充电的自动驾驶车辆与充电接口对接的照明装置;通过照明装置可以使充电桩在光线不足的情况下顺利工作,完成自动驾驶车辆与
充电桩的自动连接。
附图说明
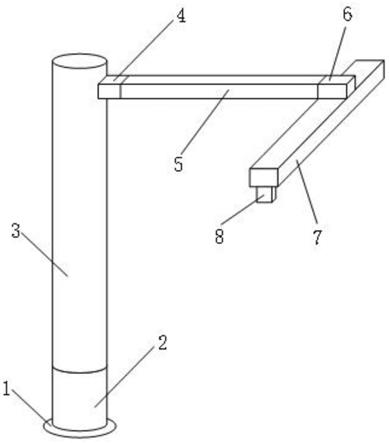
11.图1是实施例的自动驾驶车辆的充电桩的示意图;
12.图2是实施例的自动驾驶车辆的充电桩的各部件旋转或伸缩方向示意图。
具体实施方式
13.本实用新型所提供的一种自动驾驶车辆的充电桩,包括底座、立柱、第一充电臂、第二充电臂、充电接口、第一电机、第二电机和第三电机,立柱可伸缩设置在底座上,第一充电臂可伸缩设置在立柱顶端且伸缩方向与立柱垂直,第二充电臂可伸缩设置在第一充电臂上且伸缩方向与第一充电臂的伸缩方向垂直,第一充电臂和第二充电臂用于接近待充电的自动驾驶车辆,充电接口设置在第二充电臂上,充电接口用于与待充电的自动驾驶车辆的充电接口连接,第一电机设置在底座上用于控制立柱上下伸缩和左右旋转,第二电机设置在第一充电臂和立柱的连接处用于控制第一充电臂的伸缩,第三电机设置在第二充电臂上用于控制第二充电臂的伸缩。
14.本实用新型的实施例:
15.自动驾驶车辆的充电桩的示意图如图1所示,立柱3可伸缩设置在底座1上,第一充电臂5可伸缩设置在立柱3顶端且伸缩方向与立柱3垂直,第二充电臂7可伸缩设置在第一充电臂5上且伸缩方向与第一充电臂5的伸缩方向垂直,第一充电臂5和第二充电臂7用于接近待充电的自动驾驶车辆,充电接口8设置在第二充电臂7上,充电接口8用于与待充电的自动驾驶车辆的充电接口连接,第一电机2设置在底座1上用于控制立柱3上下伸缩和左右旋转,第二电机4设置在第一充电臂5和立柱3的连接处用于控制第一充电臂5的伸缩,第三电机6设置在第二充电臂7上用于控制第二充电臂7的伸缩。充电桩的各部件旋转或伸缩方向如图2所示,第一电机2控制立柱3沿虚线a的方向左右旋转,第一电机2控制立柱3沿垂直于虚线a的方向上下伸缩;第二电机4控制第一充电臂5沿虚线b的方向伸缩;第三电机6控制第二充电臂7沿虚线c的方向伸缩。
16.充电桩工作时,首先需要自动驾驶车辆到达特定的充电区域,到达充电区域后,通过第一电机2控制立柱3的上下伸缩和左右旋转、通过第二电机4控制第一充电臂5伸缩以及通过第三电机6控制第二充电臂7的伸缩,逐步调整充电接口8的位姿,以配合不同位姿下的自动驾驶车辆充电,以保证充电接口8与自动驾驶车辆上的充电接口顺利对接,完成充电。
17.作为其他实施方式,第二充电臂7上还设置有用于辅助待充电的自动驾驶车辆与充电接口8对接的红外摄像头,通过红外摄像头的设置可以提升自动驾驶车辆与充电桩自动连接时的准确度。
18.作为其他实施方式,第二充电臂7上还设置有用于辅助待充电的自动驾驶车辆与充电接口8对接的激光测距模块,通过激光测距模块的设置可以提升自动驾驶车辆与充电桩自动连接时的准确度。
19.作为其他实施方式,立柱3上还设置有用于辅助待充电的自动驾驶车辆与充电接口8对接的照明装置,通过照明装置可以使充电桩在光线不足的情况下顺利工作,完成自动驾驶车辆与充电桩的自动连接。
20.上述实施例仅以一种具体的实施方式说明本实用新型的技术方案,任何对本实用新型进行的等同替换及不脱离本实用新型精神和范围的修改或局部替换,其均应涵盖在本实用新型权利要求保护的范围之内。
技术特征:
1.一种自动驾驶车辆的充电桩,其特征在于:包括底座、立柱、第一充电臂、第二充电臂、充电接口、第一电机、第二电机和第三电机,所述立柱可伸缩设置在所述底座上,所述第一充电臂可伸缩设置在所述立柱顶端且伸缩方向与所述立柱垂直,所述第二充电臂可伸缩设置在所述第一充电臂上且伸缩方向与所述第一充电臂的伸缩方向垂直,所述第一充电臂和所述第二充电臂用于接近待充电的自动驾驶车辆,所述充电接口设置在所述第二充电臂上,所述充电接口用于与待充电的自动驾驶车辆的充电接口连接,所述第一电机设置在所述底座上用于控制所述立柱上下伸缩和左右旋转,所述第二电机设置在所述第一充电臂和所述立柱的连接处用于控制所述第一充电臂的伸缩,所述第三电机设置在所述第二充电臂上用于控制所述第二充电臂的伸缩。2.根据权利要求1所述的一种自动驾驶车辆的充电桩,其特征在于:所述第二充电臂上还设置有用于辅助待充电的自动驾驶车辆与所述充电接口对接的红外摄像头。3.根据权利要求1或2所述的一种自动驾驶车辆的充电桩,其特征在于:所述第二充电臂上还设置有用于辅助待充电的自动驾驶车辆与所述充电接口对接的激光测距模块。4.根据权利要求3所述的一种自动驾驶车辆的充电桩,其特征在于:所述立柱上还设置有用于辅助待充电的自动驾驶车辆与所述充电接口对接的照明装置。
技术总结
本实用新型涉及一种自动驾驶车辆的充电桩,包括底座、立柱、第一充电臂、第二充电臂、充电接口、第一电机、第二电机和第三电机,立柱可伸缩设置在底座上,第一充电臂可伸缩设置在立柱顶端且伸缩方向与立柱垂直,第二充电臂可伸缩设置在第一充电臂上且伸缩方向与第一充电臂的伸缩方向垂直,第一充电臂和第二充电臂用于接近待充电的自动驾驶车辆,充电接口设置在第二充电臂上,充电接口用于与待充电的自动驾驶车辆的充电接口连接,第一电机设置在底座上用于控制立柱上下伸缩和左右旋转,第二电机设置在第一充电臂和立柱的连接处用于控制第一充电臂的伸缩,第三电机设置在第二充电臂上用于控制第二充电臂的伸缩。于控制第二充电臂的伸缩。于控制第二充电臂的伸缩。
技术研发人员:牟海明 孟庆斌 栾粉粉 郭宜兴 吕培康 郑景乐
受保护的技术使用者:中原动力智能机器人有限公司
技术研发日:2021.02.05
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
