1.本发明涉及行驶车系统。
背景技术:
2.在半导体制造工厂等制造工厂中,例如使用通过行驶车对收容半导体晶片或掩模的输送容器(foup,掩模盒)等物品进行输送的行驶车系统。作为该行驶车系统,公知有保持物品的行驶车沿着铺设于顶棚的轨道行驶的系统,为了使行驶车的行驶路径多样化,提出了将轨道配置为格子状而使行驶车纵横行驶的结构。
3.在使行驶车纵横行驶的行驶车系统中,收容物品的收容部与行驶车的主体部一起配置于轨道的上方的结构中,在与轨道的下方的规定位置之间装卸物品的情况下,需要使用没有轨道的部位或者轨道与轨道之间使物品升降,因此物品的装卸位置受到限制。因此,提出了行驶车能够在轨道的下侧保持物品的状态下沿着格子状的轨道纵横行驶的行驶车系统(参照专利文献1)。
4.如专利文献1的行驶车系统那样,在轨道的下侧保持物品的系统中,行驶车轮配置于轨道的上方,而物品的收容部或行驶车的主体部配置于轨道的下方。因此,成为将行驶车轮与收容部(或主体部)连结的连结部件跨越轨道的上下而设置的结构。在格子状的轨道中实现该结构的情况下,在轨道的交叉位置需要用于允许连结部件经过的间隙(狭缝)。在专利文献1的行驶车系统中,在轨道的交叉位置设置间隙,具有利用间隙将交叉位置的轨道断开而成的局部轨道。若在轨道的一部分存在间隙,则行驶车的行驶车轮落入间隙,而有可能对物品造成振动,因此要求抑制该振动。在专利文献1的行驶车系统中,在行驶车轮的行驶方向的前后设置第一辅助轮及第二辅助轮,抑制行驶车轮落入在格子状的轨道的一部分设置的间隙。
5.另外,提出了如下行驶车系统,以使辅助轮的下端比行驶车轮的下端高的方式配置辅助轮,并且在轨道上设置在行驶时行驶车轮位于间隙上时供辅助轮抵接的辅助轨道,由此防止行驶车轮落入间隙(参照专利文献2)。
6.专利文献1:国际公开2018/037762号
7.专利文献2:日本特开2012
‑
116648号公报
8.在专利文献1的行驶车系统中,为了防止在行驶车轮与行驶面接触时,第一辅助轮及第二辅助轮与轨道接触,将第一辅助轮及第二辅助轮各自的下端配置为比行驶车轮的下端高。在该结构中,行驶车轮向间隙落入和第一辅助轮及第二辅助轮各自的下端与行驶车轮的下端之差相当的量。
9.另外,在上述的局部轨道中,行驶车轮行驶的行驶面往往在多个方向上一部分重叠。因此,在局部轨道设置专利文献2所记载的辅助轨道的结构中,会妨碍行驶车的行驶。
技术实现要素:
10.鉴于以上那样的状况,本发明的目的在于抑制行驶车轮落入在轨道的一部分设置
的间隙,并且不需要在局部轨道配置供辅助轮的下端抵接的辅助轨道等。
11.本发明的方式所涉及的行驶车系统包括轨道和沿着轨道行驶的行驶车,轨道沿着行驶车的行驶方向依次具有第一间隙、局部轨道以及第二间隙,行驶车具有:驱动轮,在轨道的行驶面滚动;第一辅助轮,相对于行驶面非接触,并且配置于驱动轮的行驶方向的后方侧而相对于驱动轮的上下方向的相对位置被固定;以及第二辅助轮,相对于行驶面非接触,并且配置于驱动轮的行驶方向的前方侧而相对于驱动轮的上下方向的相对位置被固定,驱动轮的旋转轴与第一辅助轮的旋转轴在行驶方向上的间隔为第一间隙在行驶方向上的长度以上,驱动轮的旋转轴与第二辅助轮的旋转轴在行驶方向上的间隔为第二间隙的行驶方向上的长度以上,上述行驶车系统具备:第一辅助轨道,在行驶方向上设置于第一间隙的上游侧,并具有至少与第一间隙在行驶方向上的长度相同的行驶方向的长度,当驱动轮进入局部轨道时,在驱动轮的下端经过第一间隙的期间第一辅助轮的下端与第一辅助轨道抵接;和第二辅助轨道,在行驶方向上设置于第二间隙的下游侧,具有至少与第二间隙的行驶方向上的长度相同的行驶方向的长度,当驱动轮从局部轨道退出时,在驱动轮的下端经过第二间隙的期间第二辅助轮的下端与第二辅助轨道抵接,在第一辅助轮与第一辅助轨道抵接的期间,第二辅助轨道不处于第二辅助轮抵接的位置,在第二辅助轮与第二辅助轨道抵接的期间,第一辅助轨道不处于第一辅助轮抵接的位置。
12.另外,也可以构成为,第一辅助轮及第二辅助轮配置为相对于驱动轮在旋转轴向上错开,并且第一辅助轮及第二辅助轮的下端成为比驱动轮的下端高出第一高度,第一辅助轨道及第二辅助轨道设置于从轨道的行驶面错开的位置并具有比行驶面高出第二高度的上表面。另外,第一高度与第二高度相同或大致相同。另外,第一辅助轨道及第二辅助轨道的一方或双方是设置于轨道的凸部。另外,第一辅助轮及第二辅助轮在旋转轴向上相互错开配置,第一辅助轨道及第二辅助轨道分别与第一辅助轮及第二辅助轮对应,在旋转轴向上错开配置。
13.另外,也可以构成为,第一辅助轨道配置为在驱动轮的下端到达第一间隙时开始与第一辅助轮抵接,第二辅助轨道配置为在驱动轮的下端到达第二间隙时开始与第二辅助轮抵接。另外,行驶车在行驶方向上前方侧及后方侧分别具备驱动轮,在行驶方向上前方侧的驱动轮的下端与后方侧的驱动轮的下端在行驶方向上的间隔被设定为从局部轨道在行驶方向上的长度至第一间隙的上游侧的端部与第二间隙的下游侧的端部之间在行驶方向上的长度为止的范围之外的长度。另外,行驶车具备主体部,该主体部安装于从驱动轮的旋转轴垂下的连结部件,并位于比轨道靠下方的位置,第一间隙及第二间隙双方设置为能够供连结部件经过。另外,轨道具有沿着第一方向设置的第一轨道和沿着与第一方向正交的第二方向设置的第二轨道,局部轨道配置于第一轨道与第二轨道的交叉部分。
14.对于本发明的行驶车系统而言,在驱动轮的下端经过第一间隙的期间,第一辅助轮与第一辅助轨道抵接,第二辅助轮成为与轨道的行驶面及第二辅助轨道非接触的状态,另外,在驱动轮的下端经过第二间隙的期间,第二辅助轮与第二辅助轨道抵接,第一辅助轮成为与轨道的行驶面及第二辅助轨道非接触的状态,因此能够通过第一辅助轮及第二辅助轮中的任一方抑制驱动轮落入第一间隙或第二间隙,并且不需要在局部轨道配置供第一辅助轮或第二辅助轮的下端抵接的辅助轨道等。因此,例如即使在局部轨道中的驱动轮的行驶面在多个方向上一部分重叠的情况下,由于在该行驶面上没配置辅助轨道等,所以能够
使驱动轮在局部轨道上顺畅地行驶。
15.另外,在第一辅助轮及第二辅助轮配置为相对于驱动轮在旋转轴向上错开,并且下端成为比驱动轮的下端高出第一高度,第一辅助轨道及第二辅助轨道设置于从轨道的行驶面错开的位置并具有比行驶面高出第二高度的上表面的结构中,由于第一辅助轮及第二辅助轮相对于驱动轮在旋转轴向上错开,并且第一辅助轨道及第二辅助轨道从轨道的行驶面错开,因此能够避免驱动轮驶上第一辅助轨道及第二辅助轨道,并且能够容易地配置第一辅助轨道及第二辅助轨道。
16.另外,在第一高度与第二高度相同或大致相同的结构中,由于第一高度与第二高度相同或大致相同,因此能够防止在驱动轮的下端经过第一间隙或第二间隙时,驱动轮自行驶面的高度上下地移动,通过维持驱动轮的高度,能够抑制行驶车在行驶中上下摇晃而振动。
17.另外,在第一辅助轨道及第二辅助轨道的一方或双方是设置于轨道的凸部的结构中,能够容易且低成本地设置第一辅助轨道及第二辅助轨道。
18.另外,在第一辅助轮及第二辅助轮在旋转轴向上相互错开配置,第一辅助轨道及第二辅助轨道分别与第一辅助轮及第二辅助轮对应地,在旋转轴向上错开配置的结构中,由于第一辅助轮与第二辅助轮在旋转轴向上错开配置,并且第一辅助轨道与第二辅助轨道在旋转轴向上错开配置,因此能够避免第一辅助轮与第二辅助轨道抵接、以及第一辅助轮与第二辅助轨道抵接,从而能够避免行驶时产生阻力或振动。
19.另外,在第一辅助轨道配置为当驱动轮的下端到达第一间隙时开始与第一辅助轮抵接,第二辅助轨道配置为当驱动轮的下端到达第二间隙时开始与第二辅助轮抵接的结构中,由于当驱动轮的下端到达第一间隙时开始与第一辅助轮抵接,或者当驱动轮的下端到达第二间隙时开始与第二辅助轮抵接,因此在与驱动轮的下端到达第一间隙或第二间隙同时或大致同时,能够通过第一辅助轮或第二辅助轮支承行驶车,并且能够将第一辅助轨道及第二辅助轨道设定为在行驶方向上较短。
20.另外,在行驶车在行驶方向上前方侧及后方侧分别具备驱动轮,在行驶方向上前方侧的驱动轮的下端与后方侧的驱动轮的下端在行驶方向上的间隔被设定为从局部轨道在行驶方向上的长度至第一间隙的上游侧的端部与第二间隙的下游侧的端部之间在行驶方向上的长度的范围之外的长度的结构中,由于前方侧及后方侧的驱动轮之间的间隔被设定为从局部轨道的长度至第一间隙的上游侧的端部与第二间隙的下游侧的端部之间的长度的范围之外的长度,因此在前方侧及后方侧中的一方的驱动轮的下端经过第一间隙或第二间隙时,另一方的驱动轮也与轨道的行驶面抵接,从而能够避免行驶车的行驶驱动力中断。
21.另外,在行驶车具备主体部,该主体部安装于从驱动轮的旋转轴垂下的连结部件,并位于比轨道靠下方的位置,第一间隙及第二间隙双方设置为能够供连结部件经过的结构中,由于行驶车经由连结部件具备主体部,并且连结部件能够经过第一间隙及第二间隙,因此通过利用该第一间隙及第二间隙,能够在轨道的一部分形成交叉部分,或者使行驶方向变更为直角等的部分。
22.另外,在轨道具有沿着第一方向设置的第一轨道和沿着与第一方向正交的第二方向设置的第二轨道,局部轨道配置于第一轨道与第二轨道的交叉部分的结构中,由于在第
一轨道与第二轨道的交叉部分配置有局部轨道,因此即使在行驶车在第一轨道或第二轨道的任一个上行驶的情况下,也能够避免在经过交叉部分时驱动轮与第一辅助轨道或第二辅助轨道抵接,能够避免在行驶车经过交叉部分时产生不必要的振动。
附图说明
23.图1是示意性地示出本实施方式所涉及的行驶车系统的一个例子的图。
24.图2是表示本实施方式所涉及的行驶车系统的一个例子的立体图。
25.图3是表示轨道的一个例子的俯视图。
26.图4是表示行驶车的一个例子的立体图。
27.图5是图4所示的行驶车的侧视图。
28.图6的(a)~(c)是表示行驶部的一个例子的图,(a)是侧视图,(b)是主视图,(c)是俯视图。
29.图7的(a)~(c)是表示行驶部在轨道上行驶的状态的图。
30.图8的(a)~(c)是表示行驶部在轨道上行驶的状态的图。
31.图9的(a)~(c)是表示行驶部在轨道上行驶的状态的图。
32.图10的(a)~(c)是表示行驶部在轨道上行驶的状态的图。
33.图11的(a)~(c)是表示行驶部在轨道上行驶的状态的图。
34.图12的(a)~(c)是表示行驶部在轨道上行驶的状态的图。
35.图13是表示变更行驶方向的动作的一个例子的图。
具体实施方式
36.以下,参照附图对本发明的实施方式进行说明。但是,本发明并不限定于以下的说明。另外,在附图中,为了对实施方式进行说明,将一部分放大或者强调记载等,适当地变更比例尺而表现。在以下的各图中,使用xyz坐标系对图中的方向进行说明。在该xyz坐标系中,将与水平面平行的平面设为xy平面。为了方便,将该xy平面中的行驶车1的行驶方向即一个直线方向记为x方向,将与x方向正交的方向记为y方向。另外,将与xy平面垂直的方向记为z方向。将x方向、y方向以及z方向各自的图中的箭头方向作为 方向,与箭头方向相反的方向作为-方向进行说明。另外,将以y方向为轴的旋转方向记为θy方向。另外,将以z方向为轴的旋转方向记为θz方向。此外,行驶车1除了沿x方向行驶以外,也有时沿y方向行驶。另外,行驶车1也能够沿直线方向以外行驶,也有时例如在俯视时呈曲线形状的轨道上行驶。
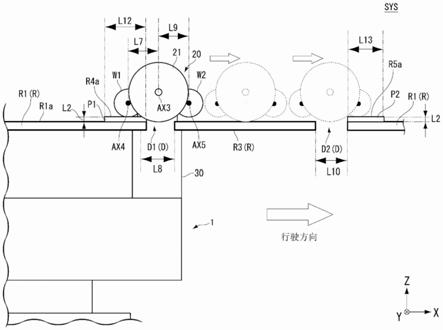
37.图1是示意性地示出本实施方式所涉及的行驶车系统sys的一个例子的图。图2是表示本实施方式所涉及的行驶车系统sys的一个例子的立体图。图3是表示轨道r的一个例子的从 z方向观察的俯视图。此外,在图3中,示出轨道r的一部分。
38.如图1及图2所示,行驶车系统sys包括轨道r和沿着轨道r行驶的行驶车1。行驶车系统sys例如是用于在半导体制造工厂的无尘室中通过行驶车1输送物品m的系统。行驶车1对收容半导体晶片的foup或者收容掩模的掩模盒等物品m(参照图5)进行输送。在行驶车系统sys中,行驶车1沿着格子状的轨道r移动,输送物品m。在行驶车系统sys中,也可以使用多台行驶车1。通过由多台行驶车1输送物品m,能够进行高密度的输送,从而能够提高物品m的
输送效率。此外,行驶车系统sys也能够应用于半导体器件制造领域以外的设备。
39.如图2及图3所示,轨道r是设置为俯视时呈格子状的格子状轨道。格子状轨道是轨道r的一个形态。轨道r铺设于无尘室等建筑物的顶棚(未图示)或顶棚附近。
40.轨道r具有第一轨道r1、第二轨道r2以及局部轨道r3。第一轨道r1沿着x方向(第一方向)设置。第二轨道r2沿着y方向(第二方向)设置。在本实施方式中,多个第一轨道r1与多个第二轨道r2以沿着相互正交的方向设置,但不相互直接交叉的方式设置。局部轨道r3配置于第一轨道r1与第二轨道r2交叉的交叉部分。
41.轨道r通过第一轨道r1与第二轨道r2沿着正交的方向设置,成为俯视时呈格子状的单元c(分区)相邻的状态。行驶车1形成为俯视时收敛于一个单元c内的尺寸(参照图2)。根据该结构,能够与在相邻的轨道r上行驶的其他行驶车1交错,在轨道r上配置有多个行驶车1的情况下,能够扩大使各行驶车1能够与其他行驶车1互不干涉地行驶的范围。
42.第一轨道r1、第二轨道r2以及局部轨道r3以经由悬挂部件n悬挂于顶棚的状态设置(参照图2)。悬挂部件n具有用于供第一轨道r1悬挂的第一部分n1、用于供第二轨道r2悬挂的第二部分n2以及用于供局部轨道r3悬挂的第三部分n3。第一部分n1及第二部分n2分别设置于夹持第三部分n3的两处。第一轨道r1、第二轨道r2以及局部轨道r3沿着相同或者大致相同的水平面(xy平面)设置。
43.轨道r沿着行驶车1的行驶方向依次具备第一间隙d1、局部轨道r3以及第二间隙d2(参照图1)。第一间隙d1相对于局部轨道r3,设置于与行驶车1的行驶方向相反的一侧(有时也称为上游侧、后方侧)。第二间隙d2相对于局部轨道r3,设置于行驶车1的行驶方向侧(有时也称为下游侧、前方侧)。此外,第一间隙d1及第二间隙d2是相同的间隙,在不对第一间隙d1与第二间隙d2进行区别的情况下,适当地表示为间隙d。
44.第一间隙d1及第二间隙d2设置在第一轨道r1与局部轨道r3之间,或者第二轨道r2与局部轨道r3之间(参照图2)。第一间隙d1及第二间隙d2是在行驶车1在第一轨道r1上行驶而横穿第二轨道r2时,或者在第二轨道r2上行驶而横穿第一轨道r1时,供作为行驶车1的一部分的后述的连结部30经过的部分。因此,第一间隙d1及第二间隙d2双方设置为能够供连结部30经过的规定的大小(间隔)。在将第一间隙d1及第二间隙d2双方构成为能够供连结部30经过的情况下,如后面图13的(a)~(c)中说明的那样,通过利用第一间隙d1及第二间隙d2,能够使连结部30的连接部件32旋转,因此能够形成在格子状轨道中能够变更行驶车1的行驶方向的部分。关于第一间隙d1及第二间隙d2,在后面进一步说明。
45.第一轨道r1、第二轨道r2以及局部轨道r3分别具有供后述的驱动轮21行驶的行驶面(上表面)r1a、r2a、r3a(参照图2、图3)。在第一轨道r1及第二轨道r2分别邻接地形成有两个行驶面r1a、r2a。行驶面r1a、r2a、r3a沿着相同或大致相同的水平面(xy平面)设置。
46.在第一轨道r1及第二轨道r2分别设置有供后述的第一辅助轮w1抵接的第一辅助轨道p1、以及供第二辅助轮w2抵接的第二辅助轨道p2(参照图3)。第一辅助轨道p1与第二辅助轨道p2成对地形成。在第一轨道r1,一对第一辅助轨道p1及第二辅助轨道p2分别设置于第一轨道r1的 y侧及-y侧。另外,在第二轨道r2,一对第一辅助轨道p1及第二辅助轨道p2分别设置于第二轨道r2的 x侧及-x侧。例如,如图3所示,在第一轨道r1的 y侧及-y侧的每一侧,第一辅助轨道p1设置于第一轨道r1的 x侧的端部,第二辅助轨道p2设置于第一轨道r1的-x侧的端部,各第一辅助轨道p1相对于成对的第二辅助轨道p2设置于 y侧。另外,
在第二轨道r2的 x侧及-x侧的每一侧,第一辅助轨道p1设置于第二轨道r2的 y侧的端部,第二辅助轨道p2设置于第二轨道r2的-y侧的端部,各第一辅助轨道p1相对于成对的第二辅助轨道p2设置于-x侧。第一辅助轨道p1及第二辅助轨道p2分别具有供第一辅助轮w1、第二辅助轮w2抵接的行驶面(上表面)r4a、r5a(参照图1)。第一辅助轨道p1的行驶面r4a以及第一辅助轨道p1的行驶面r4a形成为比驱动轮21的行驶面r1a、r2a高出第二高度l2。第二高度l2例如被设定为数100μm~数mm。此外,第一辅助轨道p1的行驶面r4a以及第一辅助轨道p1的行驶面r4a相对于驱动轮21的行驶面r1a、r2a的高度也可以不同。此外,图3所示的第一辅助轨道p1以及第二辅助轨道p2的结构只是一个例子,也可以是其他结构。例如,在第一轨道r1中,第一辅助轨道p1也可以相对于成对的第二辅助轨道p2设置于-y侧,在第二轨道r2中,第一辅助轨道p1也可以相对于成对的第二辅助轨道p2设置于 x侧。
47.第一辅助轨道p1及第二辅助轨道p2分别是设置于轨道r的凸部(参照图1)。第一辅助轨道p1及第二辅助轨道p2分别是相对于轨道r的上表面( z侧的面)向 z方向突出的凸部。第一辅助轨道p1及第二辅助轨道p2的形状在俯视时为矩形形状。第一辅助轨道p1及第二辅助轨道p2可以通过在轨道r上安装部件而形成,也可以与轨道r形成为一体。在使第一辅助轨道p1及第二辅助轨道p2为使轨道r的一部分突出而成的凸部的结构的情况下,不需要与轨道r分开设置第一辅助轨道p1及第二辅助轨道p2,因此能够使装置结构变得容易。在第一辅助轨道p1及第二辅助轨道p2的一方或双方为设置于轨道r的凸部的情况下,能够容易且低成本地设置第一辅助轨道p1及第二辅助轨道p2。此外,第一辅助轨道p1及第二辅助轨道p2的形状分别是任意的,例如第一辅助轨道p1及第二辅助轨道p2的形状可以是第一辅助轮w1及第二辅助轮w2进入的一侧的端部具有斜面的形状,也可以是具有限制第一辅助轮w1及第二辅助轮w2在与行驶方向正交的方向上的移动的引导件的形状。
48.在第一轨道r1与第二轨道r2的交叉部分配置有局部轨道r3的结构中,存在行驶车1相对于局部轨道r3从第一轨道r1沿x方向侵入及经过的情况、和行驶车1相对于局部轨道r3从第二轨道r2沿y方向侵入及经过的情况,因此在局部轨道r3,行驶车1的驱动轮21行驶的行驶面r3a在x方向及y方向多个方向上一部分重叠。因此,在局部轨道r3设置第一辅助轨道p1及第二辅助轨道p2的结构中,会妨碍行驶车1的行驶。因此,在本实施方式中,在局部轨道r3既没设置第一辅助轨道p1也没设置第二辅助轨道p2。在局部轨道r3没有设置第一辅助轨道p1及第二辅助轨道p2的结构的情况下,即使在局部轨道r3的驱动轮21的行驶面r3a在多个方向上一部分重叠的情况下,由于在该行驶面r3a没有设置第一辅助轨道p1或第二辅助轨道p2等,因此能够使驱动轮21在局部轨道r3上顺畅地行驶。
49.如上所述,在本实施方式中,轨道r具有沿着第一方向设置的第一轨道r1和沿着与第一方向正交的第二方向设置的第二轨道r2,局部轨道r3配置于第一轨道r1与第二轨道r2的交叉部分。在该结构的情况下,由于在第一轨道r1与第二轨道r2的交叉部分配置有既没设置第一辅助轨道p1也没设置第二辅助轨道p2的局部轨道r3,因此在行驶车1在第一轨道r1或第二轨道r2的任一个上行驶的情况下,也能够避免在经过交叉部分时驱动轮21与第一辅助轨道p1或第二辅助轨道p2抵接,从而能够避免在行驶车1经过交叉部分时产生不必要的振动。
50.对行驶车1进行说明。图4是表示行驶车的一个例子的立体图。图5是从-y方向观察图4所示的行驶车的侧视图。行驶车1具有主体部10、行驶部20、连结部30(连结部件)以及
控制部50(参照图5)。控制部50对行驶车1的各部的动作统一地进行控制。控制部50可以设置于主体部10,也可以设置在主体部10的外部。主体部10配置在轨道r的下方(-z侧)。主体部10安装于从驱动轮21的旋转轴ax3垂下的连结部30,配置于比轨道r靠下方的位置。主体部10形成为俯视时例如呈矩形形状。主体部10形成为俯视时收敛于格子状的轨道r的一个单元c的尺寸(参照图2)。在该结构的情况下,能够确保与在相邻的第一轨道r1或第二轨道r2上行驶的其他行驶车1交错的空间。主体部10具备上部单元17和移载装置18。上部单元17经由连结部30悬挂于行驶部20。上部单元17例如在俯视时呈矩形形状,在上表面17a具有四个角部(参照图4)。
51.移载装置18设置在上部单元17的下方。移载装置18保持物品m,并且在自身与轨道r的下方的规定的位置之间进行物品m的交接。例如,移载装置18在自身与保管装置的架部或搬入搬出部,或者加工装置等的搬入搬出部等之间进行物品m的交接。移载装置18能够绕铅垂方向的旋转轴ax1旋转(参照图5)。移载装置18具有保持物品m的物品保持部13、使物品保持部13沿铅垂方向升降的升降驱动部14、使升降驱动部14移动的横向伸出机构11、以及保持横向伸出机构11的转动部12。物品保持部13通过把持物品m的凸缘部ma,悬挂并保持物品m。物品保持部13例如是具有能够沿水平方向移动的爪部13a的卡盘,通过使爪部13a进入物品m的凸缘部ma的下方,使物品保持部13上升,来保持物品m。物品保持部13与线或带等悬挂部件13b连接。
52.升降驱动部14例如是升降机,通过放出悬挂部件13b来使物品保持部13下降,通过卷绕悬挂部件13b来使物品保持部13上升。升降驱动部14被控制部50控制,以规定的速度使物品保持部13下降或上升。另外,升降驱动部14被控制部50控制,将物品保持部13保持于目标高度。横向伸出机构11例如具有在z方向上重叠配置的多个可动板。可动板能够在y方向上移动。在最下层的可动板安装有升降驱动部14。横向伸出机构11如图5中双点划线所示,通过未图示的驱动装置使可动板移动,能够使安装于最下层的可动板的升降驱动部14及物品保持部13相对于行驶方向横向伸出。
53.转动部12设置在横向伸出机构11与上部单元17之间。转动部12具有转动部件12a和转动驱动部12b。转动部件12a设置为能够在围绕z轴的方向上转动。转动部件12a支承横向伸出机构11。转动驱动部12b使用电动马达等,使转动部件12a在围绕旋转轴ax1的方向上转动。转动部12通过来自转动驱动部12b的驱动力使转动部件12a转动,能够使横向伸出机构11(升降驱动部14及物品保持部13)在围绕旋转轴ax1的方向上旋转。
54.如图4及图5所示,也可以在行驶车1以包围移载装置18以及由移载装置18保持的物品m的方式设置罩w。罩w是下端敞开的筒状,并且具有横向伸出机构11的可动板突出的部分被切口的形状。罩w使上端安装于转动部12的转动部件12a,随着转动部件12a的转动而绕旋转轴ax1转动。
55.行驶部20具有驱动轮21、第一辅助轮w1以及第二辅助轮w2(参照图5)。行驶部20分别配置在上部单元17(主体部10)的上表面17a的四个角部(参照图3)。在本实施方式中,四个行驶部20为相同的结构。即,行驶车1在行驶方向上前方侧及后方侧分别各具备两个合计四个行驶部20(驱动轮21、第一辅助轮w1、第二辅助轮w2)。各行驶部20的驱动轮21是通过后述的行驶驱动部33的驱动力进行旋转驱动的驱动轮。此外,并不限定于四个驱动轮21全部通过行驶驱动部33的驱动力进行旋转驱动的结构,也可以是使四个驱动轮21中的一部分进
行旋转驱动的结构。即,四个驱动轮21中的一部分也可以是从动轮。各行驶部20设置为能够以旋转轴ax2为中心绕θz方向旋转(参照图5)。各行驶部20通过后述的转向机构34绕θz方向旋转,其结果,行驶车1能够变更行驶方向。
56.图6的(a)~(c)是表示行驶部20的一个例子的图。图6的(a)是从-y方向观察的侧视图。图6的(b)是从 x方向观察的主视图。图6的(c)是从 z方向观察的俯视图。
57.驱动轮21、第一辅助轮w1以及第二辅助轮w2分别安装在与后述的连结部30的支承部件31连接的旋转轴ax3、ax4、ax5(参照图6的(c))。旋转轴ax3、ax4、ax5分别沿与xy平面平行且与行驶车1的行驶方向正交的方向设置。
58.驱动轮21在轨道r上,在第一轨道r1、第二轨道r2以及局部轨道r3的行驶面r1a、r2a、r3a上滚动,使行驶车1行驶。驱动轮21的直径以及与行驶方向正交的方向的厚度的尺寸各自都没有限定,可以任意设定。驱动轮21也可以在与轨道r接触的周面上贴附橡胶等而实施防滑加工。另外,图6的(a)~(c)所示的驱动轮21只是一个例子,也可以是其他结构。例如,也可以是驱动轮21对一个行驶部20设置有两个以上的结构。
59.前方侧的驱动轮21的下端以及后方侧的驱动轮21的下端设置为前方侧的驱动轮21的下端以及后方侧的驱动轮21的下端不同时经过间隙d,在本实施方式中,在行驶方向上前方侧的驱动轮21的下端与后方侧的驱动轮21的下端在行驶方向上的间隔l3被设定为从行驶方向上的局部轨道r3的长度l4到行驶方向上的第一间隙d1的上游侧的端部与第二间隙d2的下游侧的端部之间的长度l5的范围之外(参照图3)。在该结构的情况下,在前方侧及后方侧中的一方的驱动轮21的下端经过第一间隙d1或第二间隙d2时,另一方的驱动轮21也与轨道r的行驶面r1a、r2a、r3a中的任一个抵接,因此能够避免行驶车1的行驶驱动力中断。
60.第一辅助轮w1配置在驱动轮21的行驶方向的后方侧。第二辅助轮w2配置在驱动轮21的行驶方向的前方侧(参照图6的(a))。第一辅助轮w1及第二辅助轮w2配置为在从与行驶方向正交的方向(在图6中从y方向)观察时,各自的一部分与驱动轮21重叠。在该结构的情况下,能够使行驶部20紧凑。第一辅助轮w1及第二辅助轮w2相对于驱动轮21的铅垂方向的中心线c1对称地配置。
61.另外,第一辅助轮w1的直径及第二辅助轮w2的直径小于驱动轮21的直径。在该结构的情况下,能够缩短驶部20的全长,并且能够减小使行驶部20绕θz方向旋转时的旋转半径。另外,在第一辅助轮w1及第二辅助轮w2中,与行驶方向正交的方向的厚度的尺寸小于驱动轮21的厚度的尺寸。在该结构的情况下,能够使轨道r及行驶部20紧凑。在本实施方式中,第一辅助轮w1及第二辅助轮w2各自的直径以及厚度的尺寸分别设定为相同。在该结构的情况下,能够使第一辅助轮w1及第二辅助轮w2的部件共用,因此能够抑制装置成本。
62.此外,第一辅助轮w1及第二辅助轮w2各自的直径及宽度也可以相互不同。另外,也可以对第一辅助轮w1及第二辅助轮w2与轨道r接触的周面实施降低摩擦的加工。在该结构的情况下,第一辅助轮w1及第二辅助轮w2相对于轨道r的摩擦系数减小,因此能够抑制行驶车1的行驶速度降低。另外,图6所示的第一辅助轮w1及第二辅助轮w2只是一个例子,也可以是其他结构。例如,第一辅助轮w1及第二辅助轮w2的一方或双方可以是具备两个以上的车轮的结构,也可以使用相对于旋转轴向具有锥形形状的车轮。
63.在本实施方式中,将行驶方向上的驱动轮21的旋转轴ax3与第一辅助轮w1的旋转轴ax4之间的间隔l7设定为第一间隙d1的行驶方向上的长度l8以上(参照图1)。在该结构的
情况下,通过使用第一辅助轨道p1,能够抑制驱动轮21落入第一间隙d1。另外,将行驶方向上的驱动轮21的旋转轴ax3与第二辅助轮w2的旋转轴ax5之间的间隔l9设定为第二间隙d2的行驶方向上的长度l10以上(参照图1)。在该结构的情况下,通过使用第二辅助轨道p2,能够抑制驱动轮21落入第二间隙d2。
64.第一辅助轮w1及第二辅助轮w2各自相对于驱动轮21的上下方向(z方向)的相对位置被固定。第一辅助轮w1及第二辅助轮w2分别配置在相对于第一轨道r1、第二轨道r2以及局部轨道r3的行驶面r1a、r2a、r3a非接触的位置。第一辅助轮w1及第二辅助轮w2分别配置在使它们的下端比驱动轮21的下端高的位置。另外,第一辅助轮w1被设置为铅垂方向上的第一辅助轮w1的下端与第一辅助轨道p1的行驶面r4a抵接的高度。另外,第二辅助轮w2被设置为铅垂方向上的第二辅助轮w2的下端与第二辅助轨道p2的行驶面r5a抵接的高度(参照图1)。
65.第一辅助轮w1及第二辅助轮w2配置为第一辅助轮w1的下端及第二辅助轮w2的下端分别比驱动轮21的下端高出第一高度l1(参照图6的(a))。在基于驱动轮21行驶时,若第一辅助轮w1及第二辅助轮w2与行驶面r4a、r5a接触,则存在驱动轮21的轮压无法传递到行驶面r1a的担忧,但在该结构的情况下,在基于驱动轮21行驶时,在驱动轮21不经过第一间隙d1或第二间隙d2时,驱动轮21与行驶面r1a接触,第一辅助轮w1及第二辅助轮w2双方不与行驶面r4a、r5a接触,因此能够抑制上述的驱动轮21的轮压无法传递到行驶面r1a。第一高度l1例如被设定为数100μm~数mm。此外,第一辅助轮w1的下端的高度与第二辅助轮w2的下端的高度也可以不同。
66.另外,在本实施方式中,第一高度l1与第二高度l2被设定为相同或大致相同。在该结构的情况下,能够防止在驱动轮21的下端经过第一间隙d1或第二间隙d2时,驱动轮21的下端自行驶面r1a、r2a、r3a的高度上下地移动,通过维持驱动轮21的高度,能够抑制行驶车1在行驶中上下摇晃而振动。
67.另外,第一辅助轮w1及第二辅助轮w2分别相对于驱动轮21在其旋转轴ax4、ax5方向(与行驶方向正交的方向)上错开配置,并且第一辅助轮w1与第二辅助轮w2在其旋转轴ax4、ax5方向上相互错开配置(参照图6的(b))。另外,第一辅助轨道p1及第二辅助轨道p2分别与第一辅助轮w1及第二辅助轮w2对应地,相对于驱动轮21的行驶面r1a、r2a在驱动轮21的旋转轴ax3方向(与行驶方向正交的方向)上错开配置,并且第一辅助轨道p1及第二辅助轨道p2在第一辅助轮w1及第二辅助轮w2的旋转轴ax4、ax5方向上相互错开配置。在本实施方式中,第一辅助轮w1及第二辅助轮w2分别相对于驱动轮21在轨道r的外侧的方向错开配置(参照图6的(b))。在该结构的情况下,由于驱动轮21配置在轨道r的内侧方向,因此能够抑制驱动轮21从与行驶方向正交的方向侧从轨道r脱落。此外,可以是第一辅助轮w1及第二辅助轮w2分别相对于驱动轮21在轨道r的内侧的方向错开配置,另外,也可以是驱动轮21配置于在与行驶方向正交的方向上被第一辅助轮w1与第二辅助轮w2夹持的位置。
68.这样,在第一辅助轮w1及第二辅助轮w2在其旋转轴ax4、ax5方向上相互错开配置,第一辅助轨道p1及第二辅助轨道p2分别与第一辅助轮w1及第二辅助轮w2对应,在其旋转轴ax4、ax5方向上错开配置的结构中,能够避免第一辅助轮w1与第二辅助轨道p2抵接、以及第一辅助轮w1与第二辅助轨道p2抵接,从而能够避免行驶时产生阻力或振动。
69.另外,在第一辅助轮w1及第二辅助轮w2配置为相对于驱动轮21在其旋转轴ax4、
ax5方向上错开,并且下端成为比驱动轮21的下端高出第一高度l1,第一辅助轨道p1及第二辅助轨道p2设置于从驱动轮21的行驶面r1a、r2a错开的位置并具有比行驶面r1a、r2a高出第二高度l1的上表面的结构中,能够避免驱动轮21驶上第一辅助轨道p1及第二辅助轨道p2,并且能够容易地配置第一辅助轨道p1及第二辅助轨道p2。
70.第一辅助轨道p1及第二辅助轨道p2分别以与第一辅助轮w1及第二辅助轮w2的结构对应的方式形成。第一辅助轨道p1在行驶方向上设置在第一间隙d1的上游侧。第一辅助轨道p1设置为在驱动轮21进入局部轨道r3时,在驱动轮21的下端经过第一间隙d1的期间供第一辅助轮w1的下端抵接(参照图1)。第一辅助轨道p1具有至少与第一间隙d1的行驶方向上的长度l8相同的行驶方向的长度l12。此外,第一辅助轨道p1的长度越短,第一辅助轨道p1与第一辅助轮w1的接触越被抑制,越能够抑制因接触而导致颗粒产生。例如,长度l12也可以设定为比长度l8长数10mm左右。
71.另外,在本实施方式中,设置为在第二辅助轮w2与第二辅助轨道p2抵接的期间,第一辅助轨道p1不处于第一辅助轮w1抵接的位置。根据该结构,能够抑制第一辅助轨道p1与第一辅助轮w1的不必要的接触。
72.第二辅助轨道p2在行驶方向上设置在第二间隙d2的下游侧。第二辅助轨道p2设置为在驱动轮21从局部轨道r3退出时,在驱动轮21的下端经过第二间隙d2的期间供第二辅助轮w2的下端抵接。第二辅助轨道p2具有至少与第二间隙d2的行驶方向上的长度l10相同的行驶方向的长度l13。此外,第二辅助轨道p2的长度越短,第二辅助轨道p2与第二辅助轮w2的接触越被抑制,越能够抑制因接触而导致颗粒产生。例如长度l13也可以设定为比长度l10长数10mm左右。
73.另外,在本实施方式中,设置为在第一辅助轮w1与第一辅助轨道p1抵接的期间,第二辅助轨道p2不处于第二辅助轮w2抵接的位置。根据该结构,能够抑制第二辅助轨道p2与第二辅助轮w2的不必要的接触。
74.另外,在本实施方式中,第一辅助轨道p1配置为在驱动轮21的下端到达第一间隙d1时开始与第一辅助轮w1抵接,并且第二辅助轨道p2配置为在驱动轮21的下端到达第二间隙d2时开始与第二辅助轮w2抵接。在该结构的情况下,在与驱动轮21的下端到达第一间隙d1或第二间隙d2同时或大致同时,能够通过第一辅助轮w1或第二辅助轮w2支承行驶车1,并且能够将第一辅助轨道p1及第二辅助轨道p2设定为在行驶方向上较短。
75.图7至图12是表示行驶部20在轨道r上行驶的状态的一个例子的图。在图7至图12的各图中,(a)是从-y方向观察行驶方向上前方侧的行驶部20的侧视图,(b)是从(a)的 z方向观察的俯视图。(c)是从 z方向观察行驶方向上前方侧及后方侧的行驶部20的俯视图。
76.图7的(a)~(c)所示的状态是行驶车1在第一轨道r1上朝向第一间隙d1行驶,行驶部20位于第一间隙d1的上游的状态。在该状态时,驱动轮21的下端与行驶面r1a抵接。第一辅助轮w1的下端及第二辅助轮w2的下端不与行驶面r1a、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。另外,在后方侧的行驶部20中,驱动轮21的下端与局部轨道r3的行驶面r3a抵接,另外,第一辅助轮w1的下端及第二辅助轮w2的下端不与行驶面r1a、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。因此,行驶车1被行驶方向上前方侧的驱动轮21及后方侧的驱动轮21支承。
77.接着,图8的(a)~(c)所示的状态是驱动轮21的下端即将进入第一间隙d1前的状
态。在该状态时,驱动轮21的下端位于比第一间隙d1靠上游的位置,与行驶面r1a抵接。因此,驱动轮21的下端不会落入第一间隙d1。此外,在将第一辅助轨道p1的长度l12设定为比第一间隙d1的行驶方向上的长度l8长的情况下,在该状态时第一辅助轮w1的下端向第一辅助轨道p1的抵接开始。在本实施方式中,第一辅助轨道p1配置为在驱动轮21的下端到达第一间隙d1时开始与第一辅助轮w1抵接,因此在该状态下,第一辅助轮w1的下端不与第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。另外,第二辅助轮w2的下端也不与第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。另外,在后方侧的行驶部20中,驱动轮21的下端与第一轨道r1抵接,并且第一辅助轮w1的下端及第二辅助轮w2的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。因此,行驶车1被行驶方向上前方侧的驱动轮21及后方侧的驱动轮21水平地支承。
78.接着,图9的(a)~(c)所示的状态是驱动轮21的下端进入第一间隙d1时的状态。在该状态时,驱动轮21的下端位于第一间隙d1上,因此驱动轮21不与第一轨道r1及局部轨道r3中的任一个抵接。在本实施方式中,第一辅助轨道p1配置为在驱动轮21的下端到达第一间隙d1时开始与第一辅助轮w1抵接,因此在该状态下,第一辅助轮w1的下端与第一辅助轨道p1抵接。因此,驱动轮21的下端不会落入第一间隙d1。另外,在本实施方式中,在第一辅助轮w1与第一辅助轨道p1抵接的期间,由于在第二辅助轮w2抵接的位置没配置第二辅助轨道p2,因此第二辅助轮w2的下端不与行驶面r1a、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。另外,在后方侧的行驶部20中,驱动轮21的下端与第一轨道r1抵接,并且第一辅助轮w1的下端及第二辅助轮w2的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。因此,行驶车1被行驶方向上前方侧的第一辅助轮w1及后方侧的驱动轮21水平地支承。
79.接着,图10的(a)~(c)所示的状态是驱动轮21的下端进入局部轨道r3时的状态。在该状态时,驱动轮21的下端与局部轨道r3抵接,因此驱动轮21的下端不会落入第一间隙d1。此时,第一辅助轮w1与第一辅助轨道p1抵接。另外,在本实施方式中,在第一辅助轮w1与第一辅助轨道p1抵接的期间,由于在第二辅助轮w2抵接的位置没配置第二辅助轨道p2,因此第二辅助轮w2的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。另外,在后方侧的行驶部20中,驱动轮21的下端与第一轨道r1抵接,并且第一辅助轮w1的下端及第二辅助轮w2的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。因此,行驶车1被行驶方向上前方侧的驱动轮21、第一辅助轮w1以及后方侧的驱动轮21水平地支承。
80.接着,图11的(a)~(c)所示的状态是驱动轮21的下端进入第二间隙d2时的状态。在该状态时,驱动轮21的下端位于第二间隙d2上,因此驱动轮21不与第一轨道r1及局部轨道r3中的任一个抵接。在本实施方式中,第二辅助轨道p2配置为在驱动轮21的下端到达第二间隙d2时开始与第二辅助轮w2抵接,因此第二辅助轮w2的下端与第二辅助轨道p2抵接。因此,驱动轮21的下端不会落入第二间隙d2。第一辅助轮w1的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。另外,在后方侧的行驶部20中,驱动轮21的下端与第一轨道r1抵接,并且第一辅助轮w1的下端及第二辅助轮w2的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。因此,行驶车1被行驶方向上前方侧的第二辅助轮w2及后方侧的驱动轮21水平地支承。
81.接着,图12的(a)~(c)所示的状态是驱动轮21的下端从第二间隙d2退出后的状态。在该状态时,驱动轮21的下端抵接于第一轨道r1上。另外,在后方侧的行驶部20中,驱动轮21的下端与第一轨道r1抵接,并且第一辅助轮w1的下端及第二辅助轮w2的下端不与第一轨道r1、第一辅助轨道p1以及第二辅助轨道p2中的任一个抵接。因此,行驶车1被行驶方向上前方侧的驱动轮21及后方侧的驱动轮21水平地支承。
82.如以上说明的那样,在本实施方式中,能够抑制驱动轮21落入在轨道r的一部分设置的间隙d。
83.返回到图4及图5的说明,连结部30将主体部10的上部单元与行驶部20连结。连结部30从驱动轮21的旋转轴垂下,将主体部10与行驶部20连结。连结部30分别设置于上部单元17(主体部10)的上表面17a的四个角部。通过该连结部30,主体部10成为被悬挂的状态,配置于比轨道r靠下方的位置。连结部30具有支承部件31和连接部件32。支承部件31将驱动轮21的旋转轴ax3以及第一辅助轮w1及第二辅助轮w2的旋转轴ax4、ax5支承为可旋转。通过支承部件31保持驱动轮21与第一辅助轮w1及第二辅助轮w2的相对位置。
84.连接部件32从支承部件31向下方延伸并与上部单元17的上表面17a连结,保持上部单元17。连接部件32在内部具备将后述的行驶驱动部33的驱动力传递给驱动轮21的传递机构。该传递机构可以是使用链或带的结构,也可以是使用齿轮系的结构。连接部件32设置为能够以旋转轴ax2为中心绕θz方向旋转。该连接部件32通过以旋转轴ax2为中心旋转,能够使驱动轮21绕θz方向旋转。
85.在连结部30设置有行驶驱动部33和转向机构34。行驶驱动部33安装于连接部件32。行驶驱动部33是驱动驱动轮21的驱动源,例如使用电动马达等。四个驱动轮21分别被行驶驱动部33驱动而成为驱动轮。四个驱动轮21被控制部50控制为相同或大致相同的转速。
86.转向机构34通过使连结部30的连接部件32以旋转轴ax2为中心旋转,使行驶部20绕θz方向旋转。通过使行驶部20绕θz方向旋转,能够将行驶车1的行驶方向从第一方向(x方向)变更为第二方向(y方向),或者从第二方向变更为第一方向。
87.转向机构34具有驱动源35、小齿轮36以及齿条37。驱动源35安装在行驶驱动部33中远离旋转轴ax2的侧面。驱动源35例如使用电动马达等。小齿轮36安装在驱动源35的下表面侧,通过由驱动源35产生的驱动力而绕θz方向旋转驱动。小齿轮36在俯视时呈圆形,在外周的周向具有多个齿。齿条37固定于上部单元17的上表面17a。齿条37分别设置在上部单元17的上表面17a的四个角部,设置为以行驶部20的旋转轴ax2为中心的扇形。齿条37在外周的周向具有与小齿轮36的齿啮合的多个齿。
88.小齿轮36及齿条37以相互的齿啮合的状态配置。小齿轮36绕θz方向旋转,由此小齿轮36以沿着齿条37的外周的方式沿以旋转轴ax2为中心的圆周方向移动。通过该小齿轮36的移动,行驶驱动部33及转向机构34与小齿轮36一起沿以旋转轴ax2为中心的圆周方向旋转。
89.通过转向机构34的旋转,配置在上表面17a的四个角部的行驶部20分别以旋转轴ax2为中心绕θz方向在90度的范围内旋转。转向机构34的驱动被控制部50控制。控制部50可以指示在相同的时机进行四个行驶部20的旋转动作,也可以指示在不同的时机进行。通过使行驶部20旋转,驱动轮21从与第一轨道r1及第二轨道r2的一方接触的状态移至与另一方接触的状态。因此,能够在第一方向(x方向)与第二方向(y方向)之间切换行驶车1的行驶方
向。
90.接着,对行驶车系统sys变更行驶方向的情况进行说明。图13的(a)~(c)是表示将行驶车系统sys的行驶方向从 y方向变更为 x方向的动作的图。如图13的(a)所示,行驶车系统sys向 y方向行驶并在主体部10到达轨道r的一个分区(单元c)内的位置(四个角部伸到局部轨道r3的位置)停止。即,控制部50(参照图5)基于来自位置检测部(未图示)的位置信息,在上述的位置处使行驶驱动部33的驱动停止。此时,四个驱动轮21均成为与第二轨道r2的行驶面r2a接触了的状态。
91.接下来,如图13的(b)所示,控制部50使转向机构34驱动而使连结部30旋转,使配置在四个角部的行驶部20分别以旋转轴ax2为中心绕θz方向旋转。此时,处于对角的行驶部20等向相同方向旋转。例如,四个行驶部20中、图示中的左上的行驶部20等和右下的行驶部20等顺时针旋转。另一方面,图示中的右上的行驶部20等和左下的行驶部20等逆时针旋转。此外,这样的旋转动作可以在相同的时机进行,例如也可以使图示中的左上及右下的行驶部20等先同时旋转,然后使图示中的右上及左下的行驶部20等同时旋转等,在不同的时机进行旋转。
92.接下来,如图13的(c)所示,控制部50在各行驶部20等分别绕θz方向旋转了90
°
之后,使转向机构34的驱动停止。在该状态下使行驶驱动部33驱动,由此行驶车系统sys能够向 x方向行驶。此外,行驶车系统sys也能够向-x方向行驶。另外,即使在行驶部20等旋转了的情况下,主体部10也不旋转。因此,在行驶车系统sys向y方向行驶的情况或者向x方向行驶的情况的任意情况下,主体部10的朝向都不被变更。
93.如以上说明的那样,本实施方式的行驶车系统sys包括轨道r和沿着轨道r行驶的行驶车1,轨道r沿着行驶车1的行驶方向依次具有第一间隙d1、局部轨道r3以及第二间隙d2,行驶车1具有:驱动轮21,在轨道r的行驶面r1a、r2a、r3a上滚动;第一辅助轮w1,相对于行驶面r1a、r2a、r3a非接触,并且配置在驱动轮21的行驶方向的后方侧而相对于驱动轮21的上下方向的相对位置被固定;以及第二辅助轮w2,相对于行驶面r1a、r2a、r3a非接触,并且配置在驱动轮21的行驶方向的前方侧而相对于驱动轮21的上下方向的相对位置被固定,行驶方向上的驱动轮21的旋转轴与第一辅助轮w1的旋转轴之间的间隔l7为第一间隙d1的行驶方向上的长度l8以上,行驶方向上的驱动轮21的旋转轴与第二辅助轮w2的旋转轴之间的间隔l9为第二间隙d2的行驶方向上的长度l10以上,上述行驶车系统具备:第一辅助轨道p1,在行驶方向上设置于第一间隙d1的上游侧,具有至少与第一间隙d1的行驶方向上的长度l8相同的行驶方向的长度,在驱动轮21进入局部轨道r3时,在驱动轮21的下端经过第一间隙d1的期间供第一辅助轮w1的下端抵接;和第二辅助轨道p2,在行驶方向上设置于第二间隙d2的下游侧,具有至少与第二间隙d2的行驶方向上的长度相同的行驶方向的长度,在驱动轮21从局部轨道r3退出时,在驱动轮21的下端经过第二间隙d2的期间供第二辅助轮w2的下端抵接,在第一辅助轮w1与第一辅助轨道p1抵接的期间,第二辅助轨道p2不处于第二辅助轮w2抵接的位置,在第二辅助轮w2与第二辅助轨道p2抵接的期间,第一辅助轨道p1不处于第一辅助轮w1抵接的位置。此外,行驶车系统sys的上述以外的结构是任意的结构,上述以外的结构可以具有,也可以不具有。
94.根据上述结构,在驱动轮21的下端经过第一间隙d1的期间,第一辅助轮w1与第一辅助轨道p1抵接,第二辅助轮w2成为与轨道r的行驶面r1a、r2a、r3a及第二辅助轨道p2非接
触的状态,另外,在驱动轮21的下端经过第二间隙d2的期间,第二辅助轮w2与第二辅助轨道p2抵接,第一辅助轮w1成为与轨道r的行驶面r1a、r2a、r3a及第二辅助轨道p2非接触的状态,因此能够通过第一辅助轮w1及第二辅助轮w2中的任一方抑制驱动轮21落入第一间隙d1或第二间隙d2,并且不需要在局部轨道r3配置供第一辅助轮w1或第二辅助轮w2的下端抵接的辅助轨道等。因此,例如即使在局部轨道r3的驱动轮21的行驶面r3a在多个方向上一部分重叠的情况下,由于在该行驶面r3a没配置辅助轨道等,因此能够使驱动轮21在局部轨道r3上顺畅地行驶。
95.此外,本发明的技术范围并不限定于上述实施方式等中说明的方式。有时省略在上述实施方式等中说明的一个以上要件。另外,在上述实施方式等中说明的要件能够适当组合。另外,只要法规允许,则对日本专利申请的特愿2018
‑
203022以及在上述实施方式等中引用的所有文献的公开内容进行引用而作为本说明书的记载的一部分。
96.此外,在上述实施方式中,举出第一辅助轮w1及第二辅助轮w2旋转的结构为例进行了说明,但并不限定于该结构。例如,第一辅助轮w1及第二辅助轮w2也可以是不旋转而滑动的结构。
97.另外,在上述实施方式中,举出主体部10形成为俯视时收敛于格子状的轨道r的一个分区内的尺寸的结构为例进行了说明,但并不限定于该结构。例如,主体部10也可以形成为俯视时比轨道r的一个分区大的尺寸,也可以是一部分相对于轨道r的一个分区突出的形状。
98.附图标记说明
99.sys
…
行驶车系统;1
…
行驶车;d
…
间隙;d1
…
第一间隙;d2
…
第二间隙;m
…
物品;r
…
轨道;r1
…
第一轨道;r2
…
第二轨道;10
…
主体部;20
…
行驶部;21
…
驱动轮;d1
…
第一间隙;d2
…
第二间隙;p1
…
第一辅助轨道;p2
…
第二辅助轨道;r1
…
第一轨道;r2
…
第二轨道;r3
…
局部轨道;w1
…
第一辅助轮;w2
…
第二辅助轮。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

