1.本发明涉及一种矿区运输卡车自动控制路径的方法。
背景技术:
2.露天矿场相比城市道路,行驶路线较为单一,障碍物与各种场景较为可控,是无人驾驶的一个很有前景的落地方向,同时,矿区的作业条件艰苦,运用无人驾驶技术也可以避免人工作业的各种风险,然而,矿区道路地形条件复杂,车道等地图信息不明显,同时会随着作业流程不断变化,这些因素也为自动驾驶实现矿区运输全作业流程提出了很大挑战;现有技术的无人驾驶的路径技术主要聚焦城市道路场景,是基于高精地图的点对点驾驶,并没有成熟的应用与矿山场景的控制路径方法。同时矿山的地图具有可变性大,无明显车道线等问题,而且任务流程较为复杂,现有城市道路的无人驾驶技术并不能很好的适应矿用卡车的作业场景。
技术实现要素:
3.本发明的目的是提供一种矿区运输卡车自动控制路径的方法,该方法能够有效实现了无人驾驶矿车在工作过程中的各种路径的控制任务,完成全作业流程,并将规划模块信息交由下层控制模块进行执行,同时与云端调度中心进行通信,保证无人驾驶矿车能够安全精准行驶。
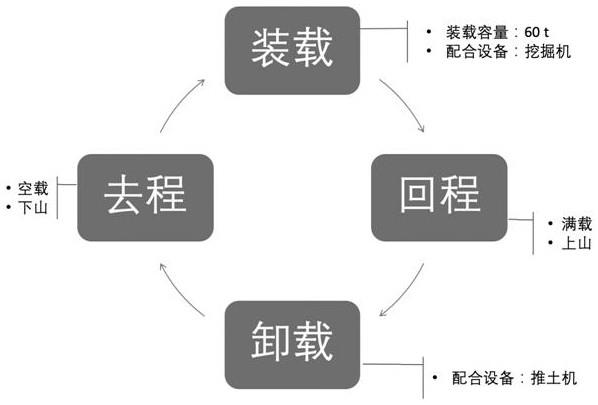
4.上述的目的通过以下的技术方案实现:一种矿区运输卡车自动控制路径的方法,该方法包括如下步骤:首先是矿区运输卡车的工作流程包括装载、回程、卸载、去程4个工作过程,所述的工作流程各个子任务之间差异较大,每个子任务之间互相独立,中控平台发送调度命令,选定无人驾驶的矿区运输卡车执行指定子任务作业命令,规划模块负责执行当前的任务,并反馈实时执行情况;(1)装载区行驶阶段:所述的矿区运输卡车从卸载区场驾驶至装载区的固定终点位置a;入库第一阶段:挖掘机位置上报调度平台,所述的调度平台计算适合的倒车点b,并发送给规划模块,所述的矿区运输卡车行驶至点a的位置;入库第二阶段:所述的矿区运输卡车在点b结束自动驾驶后,调度平台发送指令,所述的矿区运输卡车开始向铲车位置倒车,行至铲车范围2米内c,或遇障碍物无法行进10秒
‑
30秒后,任务结束;出库阶段:所述的调度平台根据装载位置c计算出合适的重新回道路点的位置,所述的矿区运输卡车从c出发,重新回到道路,准备下一个行驶阶段的任务;(2)卸载区行驶阶段:所述的矿区运输卡车从装载区驾驶至卸载区的固定终点位置d,等待云端发送卸载指令;入库第一阶段:卸载点位置由推土机上报调度平台,调度平台计算适合的倒车点
e,并发送给规划模块,所述的矿区运输卡车行驶至点e;入库第二阶段:所述的矿区运输卡车在点e结束自动驾驶后,调度平台发送指令,所述的矿区运输卡车开始向卸载位置倒车,行至卸载点1米内f,或遇障碍物无法行进10秒
‑
30秒后,任务结束;出库阶段:调度平台根据排土位置f点,计算出合适的重新回道路点的位置,所述的矿区运输卡车从f点出发,重新回到道路,准备下一个行驶阶段的任务。
5.所述的矿区运输卡车自动控制路径的方法,所述的行驶阶段为一般的点对点自动驾驶任务,可以沿用的正常的自动驾驶规划模块;所述的入库第一阶段的任务,目标是找到可行的入库第二阶段的初始倒车点,作为该阶段任务的终点,由于铲车点或卸载点对于每个任务循环都有可能发生变化,需要动态确定该终点位置;确定方法:从铲车点或卸载点往道路做垂线,交点往前延伸20m,具体数值由所述的矿区运输卡车的转弯半径而定,需要大于2倍的车辆转弯半径,调度平台在计算出终点位置以后,发送给规划模块,依然可以沿用正常的自动驾驶规划模块;所述的入库第二阶段的任务,是一个没有车道线的车辆规划,调度平台将目标点铲车点或者卸载点的位置以及目标朝向角信息发给规划模块,规划模块在收到目标点信息后,采用dubins曲线构造车道中心线,在rsr、lsl、rsl、lsr四种线型中选取总距离最短的一种作为最优的车道中心线,然后把该中心线的左右各扩展半车宽 1米作为车道边界,然后可以使用正常的规划模块构造轨迹信息。
6.有益效果:1.本发明主要是提供一种矿区运输卡车自动控制路径的方法,该方法能够有效解决现有技术没有针对无人驾驶的矿区卡车在矿山场景的自动控制路径的弊病,采用中控平台发送调度命令,选定无人驾驶矿车执行指定子任务作业命令,并且通过规划模块负责执行当前的任务,并将规划模块信息交由下层控制模块进行执行,同时与云端调度中心进行通信,保证无人驾驶矿车能够安全精准行驶。
7.2.本发明适用于矿山露天矿自动驾驶应用场景,可辅助实现自动驾驶稳定运行。
8.3.本发明的方法解决了矿区环境艰苦,作业的危险性高,人工作业成本高的难题,使用无人驾驶矿车长期来看可以降低人力成本,同时降低作业人员的安全风险。
9.附图说明:附图1是本发明的工作流程图。
10.附图2是本发明的装载区运输卡车行程示意图。
11.附图3是本发明的卸载区运输卡车行程示意图。
12.附图4是本发明的矿区运输卡车行驶示意图之一。
13.附图5是本发明的矿区运输卡车行驶示意图之二。
14.附图6是本发明的矿区运输卡车行驶示意图之三。
15.附图7是本发明的矿区运输卡车行驶示意图之四。
16.附图8是本发明的矿区运输卡车升降示意图。
17.具体实施方式:实施例1:
一种矿区运输卡车自动控制路径的方法,该方法包括如下步骤:首先是矿区运输卡车的工作流程包括装载、回程、卸载、去程4个工作过程,所述的工作流程各个子任务之间差异较大,每个子任务之间互相独立,中控平台发送调度命令,选定无人驾驶的矿区运输卡车执行指定子任务作业命令,规划模块负责执行当前的任务,并反馈实时执行情况;(1)装载区行驶阶段:所述的矿区运输卡车从卸载区场驾驶至装载区的固定终点位置a;入库第一阶段:挖掘机位置上报调度平台,所述的调度平台计算适合的倒车点b,并发送给规划模块,所述的矿区运输卡车行驶至点a的位置;入库第二阶段:所述的矿区运输卡车在点b结束自动驾驶后,调度平台发送指令,所述的矿区运输卡车开始向铲车位置倒车,行至铲车范围2米内c,或遇障碍物无法行进10秒
‑
30秒后,任务结束;出库阶段:所述的调度平台根据装载位置c计算出合适的重新回道路点的位置,所述的矿区运输卡车从c出发,重新回到道路,准备下一个行驶阶段的任务;(2)卸载区行驶阶段:所述的矿区运输卡车从装载区驾驶至卸载区的固定终点位置d,等待云端发送卸载指令;入库第一阶段:卸载点位置由推土机上报调度平台,调度平台计算适合的倒车点e,并发送给规划模块,所述的矿区运输卡车行驶至点e;入库第二阶段:所述的矿区运输卡车在点e结束自动驾驶后,调度平台发送指令,所述的矿区运输卡车开始向卸载位置倒车,行至卸载点1米内f,或遇障碍物无法行进10秒
‑
30秒后,任务结束;出库阶段:调度平台根据排土位置f点,计算出合适的重新回道路点的位置,所述的矿区运输卡车从f点出发,重新回到道路,准备下一个行驶阶段的任务。
18.实施例2:根据实施例1所述的矿区运输卡车自动控制路径的方法,所述的行驶阶段为一般的点对点自动驾驶任务,可以沿用的正常的自动驾驶规划模块;所述的入库第一阶段的任务,目标是找到可行的入库第二阶段的初始倒车点,作为该阶段任务的终点,由于铲车点或卸载点对于每个任务循环都有可能发生变化,需要动态确定该终点位置;确定方法:从铲车点或卸载点往道路做垂线,交点往前延伸20m,具体数值由所述的矿区运输卡车的转弯半径而定,需要大于2倍的车辆转弯半径,调度平台在计算出终点位置以后,发送给规划模块,依然可以沿用正常的自动驾驶规划模块;所述的入库第二阶段的任务,是一个没有车道线的车辆规划,调度平台将目标点铲车点或者卸载点的位置以及目标朝向角信息发给规划模块,规划模块在收到目标点信息后,采用dubins曲线构造车道中心线,在rsr、lsl、rsl、lsr四种线型中选取总距离最短的一种作为最优的车道中心线,然后把该中心线的左右各扩展半车宽 1米作为车道边界,然后可以使用正常的规划模块构造轨迹信息。
19.对于矿区运输卡车的升降任务,车辆只需在原地进行货箱的举升下降即可,相应的货箱倾倒策略如图8所示:
此外,在任务执行的过程中存在执行失败的可能性,需要对状态异常进行额外的处理以及保护措施:任务中途:如果异常收到了调度平台新的任务指令,规划模块不予响应,需要等待掉图平台任务反馈失败或者人工接管后,才响应新的任务请求。
20.任务失败:由于环境多变、车辆线控不稳定等因素,因此真正运行过程中会经常出现任务失败的情况,人工接管以及规划模块反馈的任务失败均视为失败,此时,下一步的任务分为两种情况:(1)排除障碍后,可重新尝试本阶段任务:由安全员发起,调度平台根据主车以及目标点的位置等状态判断该任务是否还能重新进行。如果满足发起条件,则重新给规划模块发送对应的任务信息;(2)人工操作直接完成本阶段任务,开始下阶段任务:由安全员发起,调度平台根据主车以及目标点的位置等状态判断下个任务能否进行。如果满足发起条件,则给规划模块发送对应的任务信息;其中:附图4中的rsr是矿区运输卡车行驶路径为右直右;附图5中的lsl是矿区运输卡车行驶路径为左直左;附图6中的rsl是矿区运输卡车行驶路径为右直左;附图7中的lsr是矿区运输卡车行驶路径为左直右(具体:l为左,s为直线,r为右)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。