1.本发明涉及用于切割食物对象的切割设备,更具体地,涉及包括可以围绕穿过圆形刀片的中心的第一轴线旋转的圆形刀片的切割设备,并且其中,圆形刀片还可以围绕第二轴线旋转,其中,第二轴线相对于第一轴线平行且不同轴。本发明还涉及相应的用途和方法。
背景技术:
2.在食物加工厂中,将家畜的切割物,诸如牛或猪的原始切割物,切割成子切割物是一种有利地以高产能的方式被实施,但同时必须在高质量、诸如留下确定大小的(诸如尺寸和/或质量)和具有整齐的切割界面的子切割物、的情况下被实施的过程。然而,高产能和高质量的参量需要权衡。
3.因此,用于切割食物对象的改进的系统、用途和方法,特别是减轻或克服权衡、诸如同时实现高产能和高质量、的系统、用途和方法,将是有利的。
技术实现要素:
4.本发明的目的可以视为提供克服上述问题的系统、用途和方法。因此,在本发明的第一方面中,上述目的和其他几个目的意在通过提供用于切割食物对象、诸如将食物对象切成片、的切割设备来获得,所述设备包括:
5.‑
第一圆形刀片,该第一圆形刀片可以围绕穿过圆形刀片的中心的第一轴线旋转,并且其中,圆形刀片可以围绕第二轴线旋转,其中,第二轴线相对于第一轴线平行且不同轴,
6.所述设备进一步包括:
7.‑
测量装置,该测量装置用于确定待切割的食物对象的至少一部分表面的位置,该测量装置是诸如高度轮廓仪,该高度轮廓仪布置成用于确定食物对象的高度轮廓,以及
8.‑
处理器,该处理器布置成用于基于待切割的食物对象的至少一部分表面的位置,诸如高度轮廓,来控制圆形刀片围绕第二轴线的角速度,诸如角速率。
9.系统主要用一个圆形刀片来描述,但也可以配备有两个、三个、四个或更多个刀片,这些刀片在同一切割平面中切割并且这些刀片都以与关于第一圆形刀片所描述的方式类似的方式围绕第二轴线定位。
10.本发明可以被视为特别地但不排他地有利于获得能够实现高产能但同时能够实现高质量、诸如能够留下确定大小的(诸如尺寸和/或质量)和具有整齐的切割界面的子切割物、的切割设备。更具体地,通过具有用于确定待切割的对象的至少一部分表面的位置的测量装置和布置成用于基于待切割的食物对象的至少一部分表面的位置来控制圆形刀片围绕第二轴线的角速度的处理器,可能以任何给定的角度将角速度调整为适当的。例如,可以在圆形刀片不与任何食物对象接触的角度、诸如角间隔、处应用相对高的角速度(相对于下面提到的相对低的角速度),。这可以确保高产能,因为圆形刀片在完成切割一个食物对
象到开始切割随后的食物对象(诸如在同一食物对象的另一位置处的食物对象)之间横越角距离上花费的时间最少。此外,当开始切割食物对象时(诸如当开始切割时以及在食物对象的整个切割过程中),可以应用相对低的角速度(相对于下面提到的相对高的角速度),其中,用于应用所述相对低的角速度的角位置由测量装置获得。这可以特别是通过能够留下整齐的切割界面确保高质量。此外,可以应用关于表面的位置的信息来估计子切割物的质量和/或大小,这又可以使得能够获得更确定的大小。
11.切割设备可以布置成每分钟进行60次或更多次,诸如100次或更多次,诸如120次或更多次,诸如180次或更多次,诸如200次或更多次的切割。
12.食物对象的“高度轮廓”被理解为至少在食物对象将被切割的位置/线/平面处确定。“高度轮廓”被理解为当沿与由第一圆形刀片限定的切割平面正交的轴线注视时所观察到的轮廓。“高度轮廓”被理解为是定量的,诸如不仅形状是确定的,而且绝对值的确定的(诸如高度和位置的对应值)。高度被理解为到线或平面、诸如水平线或水平平面、的距离,例如到传送机带的表面的距离,其中待切割的食物对象位于该表面上。在实施例中,(例如通过确定多个单独的高度轮廓),确定食物对象的表面,诸如整个食物对象的表面,这可以用于例如基于对产生的子切割物的大小的预测,确定在何处进行切割。
[0013]“食物对象”可以是鱼或肉,诸如肉,诸如来自牛或猪的肉,诸如来自牛或猪的原始切割物。“食物对象”可以是新鲜的食物对象,诸如未冷冻的和/或未过冷的。食物对象也可以是被冷冻的和/或过冷的。食物对象可以具有至少100克、诸如至少1000克、的质量和/或小于10千克、诸如小于5千克、的质量。食物对象可以具有在0.1千克至10千克的范围内、诸如在1千克至5千克的范围内、的质量。
[0014]
圆形刀片围绕其自身轴线(第一轴线)旋转,并且围绕另一轴线(第二轴线)旋转,诸如除了围绕圆形刀片的自身轴线旋转(诸如至少每分钟50转(rpm),诸如至少100rpm,诸如至少250rpm,诸如至少500rpm)之外,圆形刀片还围绕另一轴线旋转(诸如进行行星旋转)。第一轴线与第二轴线大体上平行,诸如第一轴线与第二轴线之间的角度在0度至10度的范围内,诸如在0度至2度的范围内,诸如在0度至1度的范围内,诸如0度,诸如平行。切割设备可以包括一个或多个致动器或马达,诸如用于使圆形刀片围绕第一轴线和第二轴线旋转的一个或多个电动马达,诸如用于使圆形刀片围绕第一轴线旋转的电动马达和用于使刀片围绕第二轴线旋转的电动马达。第一轴线和第二轴线、诸如至少在与第一轴线正交并包括圆形刀片的平面处、是不同轴的,第一轴线和第二轴线之间的距离至少为1厘米,诸如至少为2厘米,诸如至少为5厘米,诸如至少为10厘米,诸如至少为20厘米,诸如至少为35厘米,诸如至少为50厘米。替代地,所述距离至少为等于圆形刀片的半径的距离。第一轴线与第二轴线之间的距离至多为100厘米,诸如至多为50厘米,诸如至多为35厘米,诸如至多为20厘米,诸如至多为10厘米。第一轴线与第二轴线之间的距离在1厘米至100厘米的范围内,诸如在10厘米至50厘米的范围内。
[0015]
在实施例中,可以有多个圆形刀片,诸如第一圆形刀片和第二圆形刀片,诸如n个圆形刀片,其中n可以是2、3、4、5、6、8、10、16,诸如其中,相邻的多个刀片之间的角度为360
°
/n。多个刀片的优点可以是增加产能,因为每个刀片需要在先前(由另一刀片)切割结束的时间点和直到切割开始的时间点之间行进更小的角距离。在有多个圆形刀片的情况下,多个圆形刀片可以被一起控制,例如被安装在共同的构件上以围绕第二轴线旋转,或者
被单独地控制,例如围绕第二轴线以可能不同的角速度值运行。
[0016]
圆形刀片的优点可以是圆形刀片比例如剑形刀片能够更好地切割(诸如留下更整齐的切割界面)。在实施例中,可以单独地控制围绕第一轴线和第二轴线的旋转速度。这种单独地控制旋转速度的可能的优点是可以针对特定应用对切割动作进行微调。圆形刀片可以以恒定速度围绕第一轴线运转,并且圆形刀片围绕第二轴线转动时的角速度可以根据待切割的食物对象的位置而不同。在实施例中,圆形刀片围绕第一轴线运转的方向与圆形刀片围绕第二轴线移动的方向相反。
[0017]“测量装置”可以被理解为能够确定待切割的食物对象的至少一部分表面的位置的任何装置。例如,测量装置可以是用于接触食物对象、诸如被食物对象移位、从而可以确定表面的一个点的位置的装置。替代地,测量装置是用于获得高度轮廓的装置,诸如光学装置,诸如激光扫描仪,其中食物对象的存在会改变激光发射的光线,改变的线被摄像机检查到,随之图像处理可以产生食物对象的高度轮廓。待切割的食物对象的至少一部分表面的位置可以使得能够确定(当圆形刀片围绕第二轴线旋转时)圆形刀片与食物对象接触的第一角位置、圆形刀片完成切割食物对象的第二角位置和圆形刀片与食物对象失去接触的第三角位置中的一个或多个或全部。换句话说,第一角位置、第二角位置、第三角位置和/或(如在别处所描述的)第四角位置可以各自取决于食物对象的在食物对象将被切割的位置处的至少一部分表面的位置。特别地,第一角位置可以取决于食物对象的在食物对象将被切割的位置处的至少一部分表面的位置。由于食物对象不一定是圆柱形的,即在待切割的位置处的表面的位置可能会随着切割而变化,所以第一角位置、第二角位置、第三角位置和/或第四角位置(诸如定量角值)中的每一个可能会随着切割而变化。高度轮廓仪(诸如用于获得高度位置和横向位置的多个对应值的装置)的优点可以是即使对于不规则形状的食物物品,高度轮廓仪也能够确定第一角位置、第二角位置和/或第三角位置。这种高度轮廓仪的另一优点可以是高度轮廓仪能够更精确地估计子切割物的大小,诸如能够提供在何处切割食物对象以便获取某一大小的子切割物的信息。“测量装置”可以布置成用于诸如以模拟或数字的形式发送或输出待切割的食物对象的至少一部分表面的位置。处理器可以布置成用于接收待切割的食物对象的至少一部分表面的位置。此外,处理器可以布置成用于基于待切割的食物对象的至少一部分表面的位置来确定、诸如计算、第一角位置、第二角位置和/或第三角位置。处理器布置成用于例如经由联接至使圆形刀片围绕第二轴线旋转的电动马达的数字模拟转换器(dac)控制圆形刀片围绕第二轴线的角速度。
[0018]
根据实施例,提出了切割设备,其中,处理器布置成用于基于待切割的食物对象的至少一部分表面的位置,诸如高度轮廓,确定当圆形刀片围绕第二轴线旋转时圆形刀片与食物对象接触的第一角位置。可能的优点是第一角值的确定能够控制围绕第二轴线的角速度,使得当圆形刀片开始切割食物对象时,角速度不会太高(诸如不超过阈值,诸如第一阈值)。在这个点处的过高的角速度危险或导致子切割物不会以整齐的切割界面结束和/或子切割物未对齐(诸如具有大体上相似的,诸如相似的或相同的、如切割之前的相对空间布置的子切割物的问题)。另一可能的优点是第一角值的确定能够控制围绕第二轴线的角速度,使得当圆形刀片在圆形刀片开始切割食物对象的角位置之前和/或之后时,角速度不会太低。在这个角位置之前和/或之后处的过低的角速度危险或导致切割设备的产能少于最佳值。“第一角位置”可以与“当圆形刀片围绕第二轴线旋转时圆形刀片与食物对象接触的角
位置”互换使用。
[0019]
根据实施例,提出了切割设备,其中,处理器布置成用于基于待切割的食物对象的至少一部分表面的位置,诸如高度轮廓,确定当圆形刀片围绕第二轴线旋转时圆形刀片完成切割食物对象的第二角位置。一个或多个可能的优点类似于上面对第一角值提到的那些(除了“第一角值”被“第二角值”代替)。“第二角位置”可以与“当圆形刀片围绕第二轴线旋转时圆形刀片完成切割食物对象的角位置”互换使用。
[0020]
根据实施例,提出了切割设备,其中,处理器布置成用于基于待切割的食物对象的至少一部分表面的位置,诸如高度轮廓,确定当圆形刀片围绕第二轴线旋转时,圆形刀片与食物对象失去接触的第三角位置,诸如其中当沿垂直于切割平面的轴线观察时,圆形刀片和食物对象的在由圆形刀片限定的切割平面中的横截面之间不再有任何重叠的第三角位置。可能的优点是能够确定角位置和对应的时间点,在该时间点食物对象的剩余部分可以开始朝向由圆形刀片限定的切割平面被移动,诸如在传送机上被传送,并且通过由圆形刀片限定的切割平面,该时间点为诸如圆形刀片不再挡住传送食物对象的剩余部分的时间点。换句话说,这使得能够尽可能早地开始移动、诸如传送、剩余的食物对象,这又可以增加切割设备的产能。“第三角位置”可以与“当圆形刀片围绕第二轴线旋转时圆形刀片与食物对象失去接触的角位置”互换使用。
[0021]
第一角位置、第二角位置和第三角位置中的每一个均指代圆形刀片围绕第二轴线旋转移动的角位置。
[0022]
根据实施例,提出了切割装置,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线的角速度在第一角位置处不超过第一阈值。这能够避免在圆形刀片开始切割食物对象时角速度过高,这可能是有利的,因为在第一角位置处的过高的角速度会有切割界面不整齐和/或一个或多个切割下的子切割物不太对齐的危险。
[0023]
可以理解,处理器可以控制圆形刀片围绕第二轴线的角速度(例如弧度/秒),并且这个角速度对应于圆形刀片的在圆形刀片接触食物对象的点处的(笛卡尔)速度(例如米/秒)。因此,“圆形刀片围绕第二轴线的角速度”可以与例如“圆形刀片的在圆形刀片接触食物对象的点处的速度”互换使用,其中后者是特定角位置、这里是指第一角位置、处的速度。
[0024]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线的角速度在经过第一角位置后,诸如在第一角位置和第二角位置或第三角位置之间,超过和/或增加到高于第一阈值。这可以有利于确保行进在开始切割食物对象和开始切割随后的同一或另一食物对象之间的角距离(诸如大约360度)所花费的时间更少,这又可以有利于增加切割设备的产能。
[0025]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线的角速度在第一角位置和第二角位置之间(诸如在碰撞食物对象后和切割过程中)增加,诸如增加到第一阈值和第二阈值之间的值。
[0026]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线的角速度在经过第一角位置之后超过第一阈值,随后在到达第二角位置之前减小。这可以既有利于确保行进在开始切割食物对象和开始切割随后的同一或另一食物对象之间、诸如在开始切割食物对象和完成切割同一食物对象之间、的角距离所花费的时间更少,又有利于能够避免当圆形刀片完成切割食物对象(在第二角位置处)时角速度过高,因
为在第二角位置处的过高的角速度会有一个或多个切割下的子切割物不太对齐的危险。
[0027]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线的角速度在第二角位置和第三角位置之间(诸如在完成切割之后,但是在圆形刀片仍与食物对象接触并挡住食物对象时)增加。
[0028]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片和第二圆形刀片围绕第二轴线的角速度在经过第三角位置之后(诸如在圆形刀片与食物对象失去接触并且不再挡住食物对象之后,并且直到开始切割随后的同一或另一食物对象)增加和/或减小。
[0029]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线在第一角位置处或在第一角位置之前的角速度大体上为零,诸如在0度/秒至3度/秒的范围内,诸如在1度/秒至3度/秒的范围内或诸如零(0度/秒)。这可以有利于确保圆形刀片准备好切割食物对象。例如,如果将食物对象传送到切割位置需要时间,可以将圆形刀片保持在与第一角位置几乎没有角距离或没有角距离的位置,以便在食物对象就位时,切割可以在很短的时间内或及时开始。
[0030]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于确保圆形刀片围绕第二轴线的在第一角位置处的角速度不为零。这可以有利于使将圆形刀片移动到开始切割食物对象的位置所花费的时间最小和/或减少切割设备的(通过停止/开始产生的)磨损和能量消耗。
[0031]
根据实施例,提出了切割设备,其中,切割设备布置成使得食物对象的切割下的部分满足预定标准,诸如厚度(诸如其中,切片的厚度在小于或等于10毫米的范围内,诸如在小于或等于5毫米的范围内,诸如在小于或等于4毫米的范围内,诸如在小于或等于3毫米的范围内)或质量(诸如其中,切片的质量值在小于或等于1000克的范围内,诸如在小于或等于500克的范围内,诸如在小于或等于200克的范围内,诸如在小于或等于100克的范围内,诸如在等于或小于50克的范围内,诸如在等于或小于10克的范围内)。任何预定标准可以是值,诸如厚度值,诸如1毫米、2毫米、3毫米、4毫米、5毫米、10毫米、20毫米,或质量值,诸如10克、20克、50克、60克、100克、200克、500克、1千克,上述值可选地具有公差,诸如在负方向和/或正方向上与所述值的允许偏差在1%、2%、5%、10%、20%或50%的范围内的公差。
[0032]
根据实施例,提出了切割设备,其中,在第一角位置处的角速度,诸如第一角位置和第二角位置之间的角速度分布,诸如第一角位置和第三角位置之间的角速度分布是根据食物产品的性质、状况和/或类型预定的。可能的优点是对食物产品的性质、状况和/或类型的了解可以直接指导适当或最佳的角速度。“性质”可以被理解为,例如脂肪和/或水含量和/或骨骼的存在。“状况”可以被理解为,例如温度和食物对象内的温度分布。“类型”可以被理解为动物、,诸如家禽、牛或猪、和/或切割,诸如颈部、腰部、腿部、肩胛等。
[0033]
根据实施例,提出了切割设备,其中,测量装置包括成像系统,该成像系统用于采集食物对象的图像数据。这可以有利于能够以非接触的方式确定待切割的食物对象的至少一部分表面的位置,诸如食物对象的高度轮廓。图像数据可以由单独的处理单元或处理器转换为所述位置或高度轮廓。
[0034]
根据实施例,提出了切割设备,其中,圆形刀片是限定切割平面的第一圆形刀片,并且其中,切割设备进一步包括可以围绕穿过第二圆形刀片的中心的第三轴线旋转的第二
圆形刀片,其中,第三轴线相对于第一轴线和第二轴线中的每一个平行且不同轴,并且其中,第二圆形刀片大体上在切割平面内,诸如在切割平面内,其中,第二圆形刀片可以围绕第二轴线旋转。第二圆形刀片通常可以布置成以类似于第一圆形刀片的方式运行。
[0035]
根据实施例,提出了切割设备,其中,圆形刀片限定了切割平面,并且其中,切割设备进一步包括:
[0036]
‑
传送机,该传送机用于将食物对象从第一位置传送至第二位置:
[0037]
‑
在第一位置中,食物对象不与切割平面相交,
[0038]
‑
在第二位置中,食物对象与切割平面相交,并且其中,在圆形刀片围绕第二轴线旋转时,食物对象将被切割,诸如被切成片或完全切割。
[0039]“传送”可以被理解为沿与由圆形刀片限定的切割平面、诸如由圆形刀片扫过的切割区域、相交的路径进行传送,诸如其中,传送机的路径在切割平面的位置处与切割平面大体上正交。
[0040]
根据实施例,提出了切割设备,其中,处理器进一步布置成用于基于第三角值,诸如第三角值和第一角值,来控制传送机的传送速度。可能的优点是处理器能够控制传送机的改进的或最佳的控制,例如在达到第三角值之前(其中,食物对象被挡住),传送机不传送或仅以非常低的速度传送,并且其中,在达到第三角值之后(并且食物对象不再被挡住),传送机速度增加。
[0041]
系统中使用的圆形刀片可以是用于切割食物对象的任何圆形刀片,诸如具有或不具有齿或凹痕的圆形刀片或刀。如果存在齿的话,可以针对待切割的食物对象选择齿的类型。用于将肉切成片的圆形刀片的优选类型可以是细锯齿刀片或无齿圆形刀。
[0042]
根据第二方面,提出了根据第一方面的设备的用途,该设备用于切割食物对象,诸如鱼对象或肉对象,诸如将食物对象、诸如鱼对象或肉对象、切成片(诸如其中,切片的厚度小于或等于10毫米,诸如小于或等于5毫米,诸如小于或等于4毫米,诸如小于或等于3毫米)。
[0043]
根据第三方面,提出了用于切割食物对象的方法,所述方法包括:
[0044]
‑
使圆形刀片围绕穿过圆形刀片的中心的第一轴线旋转,
[0045]
‑
使圆形刀片围绕第二轴线旋转,其中,第二轴线相对于第一轴线平行且不同轴,
[0046]
‑
确定待切割的食物对象的至少一部分表面的位置,诸如食物对象的高度轮廓,以及
[0047]
基于待切割的食物对象的至少一部分表面的位置,来控制圆形刀片围绕第二轴线旋转的角速度。
[0048]
可以理解,通过使切割刀片旋转来切割食物对象,诸如所述切割刀片围绕第二轴线的旋转被理解为使切割刀片移动穿过食物对象并因此切割食物对象,同时与食物对象接触的圆形刀片围绕圆形刀片自身的轴线、诸如第一轴线、旋转。
[0049]
根据实施例,提出了方法,其中,食物对象是新鲜的,诸如未冷冻的和/或未过冷的和/或未结壳冷冻的,和/或食物对象的温度高于0摄氏度。这种的可能的优点是这允许保持食物对象新鲜,这可以避免食物对象的保质期的缩短。此外,这还能够省去冷却食物对象所需的设备和过程。
[0050]
本发明的第一方面、第二方面和第三方面可以各自与其他方面中的任何一个组
合。参考下文描述的实施例,本发明的这些方面和其他方面将变得显而易见并被阐明。
附图说明
[0051]
现在将参照随附附图更详细地描述根据本发明的用于切割食物对象的切割设备、用途和方法。附图示出了实施本发明的一种方法,并且不应被解释为限制落入所附权利要求组范围内的其他可能实施例。
[0052]
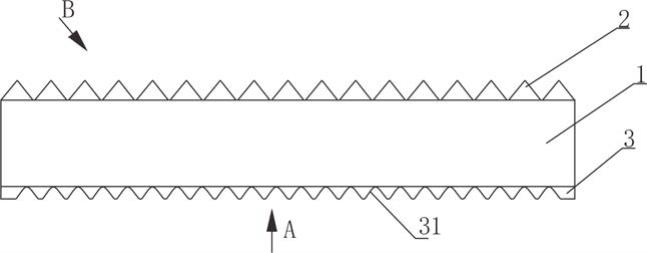
图1示出了具有成像系统和传送机的切割设备。
[0053]
图2示出了圆形刀片围绕第二轴线的角移动的示意图。
[0054]
图3至图6示出了圆形刀片围绕第二轴线的角移动的示意图。
[0055]
图7示出了圆形刀片围绕第二轴线的角速度和作为圆形刀片围绕第二轴线的角值的函数的传送机速度的示意图。
[0056]
图8示出了具有两个圆形刀片的切割系统。
[0057]
图9示出了圆形刀片围绕第二轴线的角移动和传送机带速度的曲线图。
具体实施方式
[0058]
图1示出了具有成像系统116、118和传送机126的切割设备100,更具体地是用于切割食物对象120、124的切割设备100,所述设备包括圆形刀片102,该圆形刀片102可以围绕穿过圆形刀片的中心的第一轴线103旋转,并且其中,圆形刀片102并且特别是第一轴线103可以围绕第二轴线107旋转,其中,第二轴线相对于第一轴线平行且不同轴。第一轴线103围绕第二轴线107的旋转从而限定了圆106,并且由圆形刀片102扫过的区域具有圆形外边界108。本实施例中的圆形刀片102为第一圆形刀片,该第一圆形刀片限定了切割平面,并且其中,切割设备进一步包括第二圆形刀片104,该第二圆形刀片104可以围绕穿过第二圆形刀片的中心的第三轴线105旋转,其中,第三轴线相对于第一轴线103和第二轴线107中的每一个平行且不同轴,其中,第二圆形刀片104大体上在切割平面内,诸如在切割平面内,并且其中,第二圆形刀片(104)可以围绕第二轴线旋转。第一圆形刀片102和第二圆形刀片104均布置在共同的构件上并且布置成围绕共同的轴线107进行行星运动。设备进一步包括测量装置110,该测量装置110用于确定待切割的食物对象120、124的至少一部分表面的位置,并且更具体地确定食物对象的高度轮廓。测量装置110是高度轮廓仪,该高度轮廓仪包括线激光器112、114和成像系统,该成像系统具有用于采集线激光器的线的图像数据并由此采集食物对象120、124的图像数据的摄像机116、118(在本实施例中,分别存在多个摄像机和线激光器,更具体地分别为三个,其中,在附图中仅两个可见)。设备还包括处理器(未示出),该处理器布置成用于基于待切割的食物对象的至少一部分表面的位置,诸如高度轮廓,来控制圆形刀片102围绕第二轴线107的角速度(ω)。切割设备进一步包括传送机126,该传送机126用于将食物对象从第一位置传送至第二位置,在第一位置中,食物对象120(其中,食物对象120示出在第一位置并在如箭头122指示的传送方向上移动)不与切割平面相交,在第二位置中,食物对象124(其中,食物对象124示出在第二位置并保持静止或以低的速度(诸如移动速度为0毫米/秒至2毫米/秒,诸如0毫米/秒至1毫米/秒)移动以由第一圆形刀片102切割)与切割平面相交,并且其中,食物对象将根据圆形刀片102围绕第二轴线107(在从第一位置观察的逆时针方向上)的旋转而被切割。此外,切割设备包括第二传送机128,该第二
传送机128用于将一个或多个子切割物(食物对象的(一个或多个)片状切割物)远离切割平面传送。
[0059]
图2示出了圆形刀片202a
‑
d围绕第二轴线107的角移动的示意图。示意图示出了从远离切割平面的位置(诸如对应于图1中食物对象120的第一位置的位置)观察的圆形刀片202a
‑
d在围绕第二轴线107逆时针角移动过程中处于四个不同的角位置。每个角位置示出为相对于水平轴线228测量。四个位置包括:
[0060]
a)圆形刀片202a在第一角位置230a处,其中,圆形刀片202a与食物对象124在点232处接触并开始切割。
[0061]
b)圆形刀片202b在第二角位置230b处,其中,圆形刀片202b在点234处切割食物124的由切割分开的部分之间的最后连接,并且因此角位置230b是切割完成后的角位置(但是,其中,圆形刀片202b仍然挡住食物对象124的剩余部分,诸如食物对象124的剩余部分和在这个图中看到的圆形刀片202b之间仍然存在重叠)。
[0062]
c)圆形刀片202c在第三角位置230c处,其中,圆形刀片在点236处与食物对象124失去接触(即,其中,圆形刀片202c不再挡住食物对象124的剩余部分,诸如食物对象124的剩余部分和在这个图中看到的圆形刀片202c之间不再有重叠)。
[0063]
d)圆形刀片202d在第四角位置230d处,其中,圆形刀片202d尚未与食物对象124接触并开始切割。这个角位置可以是以下位置:
[0064]
a.如果食物对象尚未就位以进行(下一次)切割,则圆形刀片202d被“暂停”,
[0065]
b.圆形刀片202d围绕第二轴线107的角旋转的减速开始,使得在第一角位置230a处的角速度不超过第一阈值,和/或
[0066]
c.传送机126的速度的减速开始,使得传送机速度在切割过程中为零或低于传送机阈值。
[0067]
图3至图6示出了圆形刀片202a
‑
d围绕第二轴线107的角移动的示意图。更具体地,图3至图6对应于图2,除了在图3至图6中的每一者中,图2中的元素已经被移除,以分别更清楚地图示第一角位置、第二角位置、第三角位置和第四角位置。
[0068]
图7示出了圆形刀片围绕第二轴线的角速度(ω)和作为圆形刀片围绕第二轴线的角值(θ)的函数的传送机速度(v)的示意图。
[0069]
更详细地,附图示出了上面的曲线图(a),其中,角值(θ)在第一轴742上,并且角速度(ω)在第二轴744上。此外,曲线图描绘了作为角值的函数的角速度曲线740。曲线示出了圆形刀片围绕第二轴线107的角速度在第一角位置230a处不超过第一阈值746(其中,角速度正好是第一阈值746)。第一阈值可以是至少100度/秒,诸如至少200度/秒,和/或最多400度/秒,诸如最多300度/秒,诸如在100度/秒至400度/秒内,诸如在200度/秒至300度/秒内,诸如250度/秒。此外,曲线示出了在经过第一角位置230a之后,圆形刀片围绕第二轴线107的角速度增加至高于第一阈值746的值。曲线单调递增直到第二角值230b,但在替代实施例中,在经过第一角位置之后,随后圆形刀片围绕第二轴线的超过第一阈值的角速度在到达第二角位置之前减小。此外,曲线示出了在经过第二角位置230b之后,圆形刀片围绕第二轴线107的角速度增加至高于第二阈值748的值。第二阈值可以是至少500度/秒,诸如至少650度/秒,和/或最多1000度/秒,诸如最多850度/秒,诸如在500度/秒至1000度/秒内,诸如在650度/秒至850度/秒内,诸如750度/秒。此外,曲线示出了圆形刀片围绕第二轴线107的角
速度减小(在本实施例中在第二角位置230b和第三角位置230c之间开始减小),因此,在下次到达第一角位置时,诸如在开始随后的切割时,圆形刀片围绕第二轴线107的角速度也不超过第一阈值746(注意,下一个“第一角位置”可能具有不同的角值,因为食物对象的高度轮廓可能会随着切割而变化)。在替代实施例中,其中,例如由于低的传送机速度或大的部分,食物对象尚未到达切割位置,角速度将在第三角位置230c之后减小到大体上为零,诸如零,并到达暂停位置(第四角位置230d),位置的定量角值由下一次切割的高度轮廓给出并且布置为使得可以在(下一个)第一角位置230a中达到第一阈值746。应当注意,图7中的第四角位置示出为与圆形刀片的“暂停位置”和传送机开始减速的位置重合,并且在实施例中可能是这种情况也可能不是这种情况,即,暂停位置可以与传送机速度发生变化的位置和/或加速度发生变化的位置不同或重合。
[0070]
图8示出了具有两个圆形刀片102、104的切割设备100,然而,例如三个或四个圆形刀片也可以围绕第二轴线107定位。圆形刀片定位在同一平面中并且因此能够、例如在两条传送机带之间的空间之间、在同一平面中切割。至少一个圆形刀片中的一个是第一圆形刀片102,并且可以围绕延伸穿过第一圆形刀片102的中心的第一轴线103旋转,并且第二圆形刀片104可以围绕延伸穿过第二圆形刀片104的中心的第三轴线105旋转,第一圆形刀片102和第二圆形刀片104均可以围绕第三轴线107旋转,其中,第三轴线相对于第一轴线103和第二轴线105中的每一个平行且不同轴。在实施例中,第一圆形刀片102限定了切割平面,并且第二圆形刀片104在这个切割平面内。还图示了食物对象124,该食物对象124在第一圆形刀片102和第二圆形刀片104围绕第二轴线107旋转过程中将首先被第一切割刀片102切割,并且随后(当传送机(未示出)在运输方向上已经进一步移动食物对象时)被第二切割刀片104切割。第一圆形刀片102和第二圆形刀片104中的每一个可以连续地并且以恒定速度运转,并且角速度、即第一圆形刀片102和第二圆形刀片104围绕第二轴线107的速度、可以如本文其他地方所描述的。当第一圆形刀片102在食物对象124中切割时,第二圆形刀片104不进行切割,而是在围绕第二轴线107的行进中以进入位置以再次切割。圆形刀片,例如2、3、4或5个圆形刀片优选地从圆形刀片的中心到第二轴线107具有相同的距离。
[0071]
图9图示了在切割食物对象时系统可能的数据。在曲线图“a”中,以度/秒为单位测量的刀速率被图示为以毫秒为单位测量的时间的函数。刀速率是围绕第二轴线107旋转的刀(例如102)的速率。刀的高速率用于将刀置于切割食物对象之间的位置。在曲线图“b”中,以米/秒为单位测量的相应的带速率被图示为以毫秒为单位测量的时间的函数。低的带速率对应于食物对象正在被切割的时间段。由曲线图图示了如何根据切割过程和切割平面中食物对象的存在来调整角刀速率。当切割平面内没有食物对象时,刀速率高。
[0072]
更详细地,附图示出了下面的曲线图(b),其中,角值(θ)在第一轴743上,并且传送机126的速度(v)在第二轴745上。此外,曲线图描绘了作为角值的函数的速度曲线750。曲线示出了当圆形刀片处于第一角位置230a时,传送机的速度不超过第一传送机速度值752(其中,传送机速度正好是第一传送机速度值752)。此外,曲线示出了在圆形刀片经过第三角位置230c之后,传送机的速度增加至高于第一传送机速度值752的值,实际上增加至第二传送机速度值754。此外,曲线示出了传送机速度降低(在本实施例中在第四角位置230d处开始降低),因此,当圆形刀片处于第一角值时,传送机的速度达到第一传送机速度值。在实施例中,第一传送机速度值752由当刀在第一角位置230a和第三角位置230c之间时传送机的允
许的(以距离为单位的)移动决定。因此,传送机速度由产品的大小和圆形刀片围绕第二轴线的旋转速度决定。
[0073]
虽然已经结合具体实施例对本发明进行了描述,但不应当将其解释为以任何方式限于所提出的示例。本发明的范围由随附的权利要求组阐述。在权利要求的上下文中,术语“包括(comprising)”或“包括(comprises)”不排除其他可能的元件或步骤。此外,提及诸如“一”或“一个”等的引用不应当被解释为排除多个。权利要求中关于附图中指示的元件的附图标记的使用也不应被解释为限制本发明的范围。此外,不同权利要求中提到的各个特征可能有利地组合,并且在不同权利要求中提到这些特征并不排除特征的组合是可能的和有利的。序数的使用,诸如“第一”、“第二”、“第三”、“主要”、“次要”和“第三的”,仅被视为用于能够或简化将例如特征或事件彼此区分的指示符、标签或标记,并不一定意味着排名。此外,序数并不意味着存在其他特征,例如,“第二特征”并不意味着存在“第一特征”,并且“第一特征”并不意味着存在“第二特征”,并且“第一特征x”或“第二特征y”可以分别各自替换为“特征x”和“特征y”。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。