1.本发明涉及一种播种设备,尤其涉及一种新一代农业智能播种设备。
背景技术:
2.播种通常指在农田的地面上刨出一系列大小相同的坑,将种子均匀撒至坑内,施加一定的养料,中间加以维护直到结出果实的过程,如今在一些地区也会采用播种机来进行播种,但是目前市面上的播种机在实际使用时,无法将翻土和播种两个过程有效结合,导致播种的效率不高,另外现有的播种机在播种过程中需要耗费大量的人力和物力,进而需要较高的成本。
3.专利申请cn211321992u,公开日为2020.08.25,公开了一种农业用播种设备,包括有车架、挡板、管道、储料盒、第一传动轴、盒体、第一电机、第二传动轴和锥杆等,所述车架底部一侧设置有播种机构,所述车架底部另一侧设置有打孔机构,所述播种机构由挡板、管道、储料盒和第一传动轴组成,所述挡板固定连接于管道底部,所述管道固定连接于储料盒底部,所述第一传动轴转动连接于储料盒内部,所述第一传动轴贯穿储料盒底部并延伸至底部外侧,所述第一传动轴与挡板固定连接,通过凸轮带动锥头向下运动在地面上打孔,打孔结束后推动车架使管道处于圆孔上方,转动摇把,使圆盘脱离管道底部,从而使种子通过管道流至圆孔内部,完成播种,然而该装置不能自动翻土。
4.因此,需要研发一种能够自动翻土、间歇下料且能够自动下种的新一代农业智能播种设备。
技术实现要素:
5.为了克服现有的播种设备经济成本高、不能自动翻土且播种效率低的缺点,技术问题为:提供一种能够自动翻土、间歇下料且能够自动下种的新一代农业智能播种设备。
6.本发明的技术方案是:一种新一代农业智能播种设备,包括有:支架和滚轮,支架下部内侧转动式设有滚轮;把手,支架上设有两个把手;接触开关,支架上设有接触开关;滚动机构,支架上设有滚动机构;接料筒,滚动机构上滑动式设有接料筒;下料机构,滚动机构上设有下料机构,下料机构与接料筒配合;接料机构,滚动机构上设有接料机构,接料机构与接料筒连接;翻转机构,接料机构上设有翻转机构,翻转机构与滚动机构连接。
7.进一步,滚动机构包括有:安装架,支架上设有安装架;外壳,安装架底部设有外壳;第一转轴,安装架内侧转动式设有第一转轴,第一转轴与外壳转动式连接;
支撑架,第一转轴上设有两根支撑架;滚筒,两根支撑架之间连接有滚筒,滚筒与外壳滑动式连接。
8.进一步,下料机构包括有:第一安装块,滚筒内部设有六块第一安装块;存料箱,六块第一安装块之间连接有存料箱;固定块,存料箱上设有固定块;第一电动推杆,固定块底部设有第一电动推杆;推块,第一电动推杆的伸缩杆上设有推块,推块与固定块滑动式连接;挡板,推块上设有挡板,挡板与存料箱滑动式连接。
9.进一步,接料机构包括有:第二安装块,一侧的支撑架上设有第二安装块;第二电动推杆,第二安装块内侧设有第二电动推杆;连接板,第二电动推杆的伸缩杆底部设有连接板,连接板与接料筒连接,连接板与相近的一侧的支撑架滑动式连接;第一距离传感器,滚筒上设有第一距离传感器;第二距离传感器,接料筒上设有第二距离传感器。
10.进一步,翻转机构包括有:齿条,另一侧的支撑架上设有齿条;第二转轴,接料筒上部内侧转动式设有第二转轴;直齿轮,第二转轴上设有直齿轮,直齿轮与齿条啮合;接料板,第二转轴上设有六块接料板,接料板与接料筒滑动式连接。
11.进一步,还包括有翻土机构,翻土机构包括有:安装板,两根支撑架上均设有安装板;第三电动推杆,安装板内侧设有第三电动推杆;铲板,两根第三电动推杆的伸缩杆之间连接有铲板,铲板与滚筒滑动式连接。
12.进一步,还包括有卡住机构,卡住机构包括有:第一伸缩杆,支架下部设有四根第一伸缩杆;压板,四根第一伸缩杆顶部之间连接有压板,压板与支架滑动式连接;摩擦块,压板下部内侧连接有摩擦块,摩擦块与滚轮滑动式连接;压杆,压板上部内侧设有压杆;第一弹簧,第一伸缩杆上绕有第一弹簧,第一弹簧连接在压板与支架之间;卡块,压板内侧滑动式设有卡块,卡块与支架配合,卡块与压板之间连接有拉绳;第二伸缩杆,卡块与压板之间连接有两根第二伸缩杆;第二弹簧,第二伸缩杆上绕有第二弹簧,第二弹簧连接在卡块与压板之间。
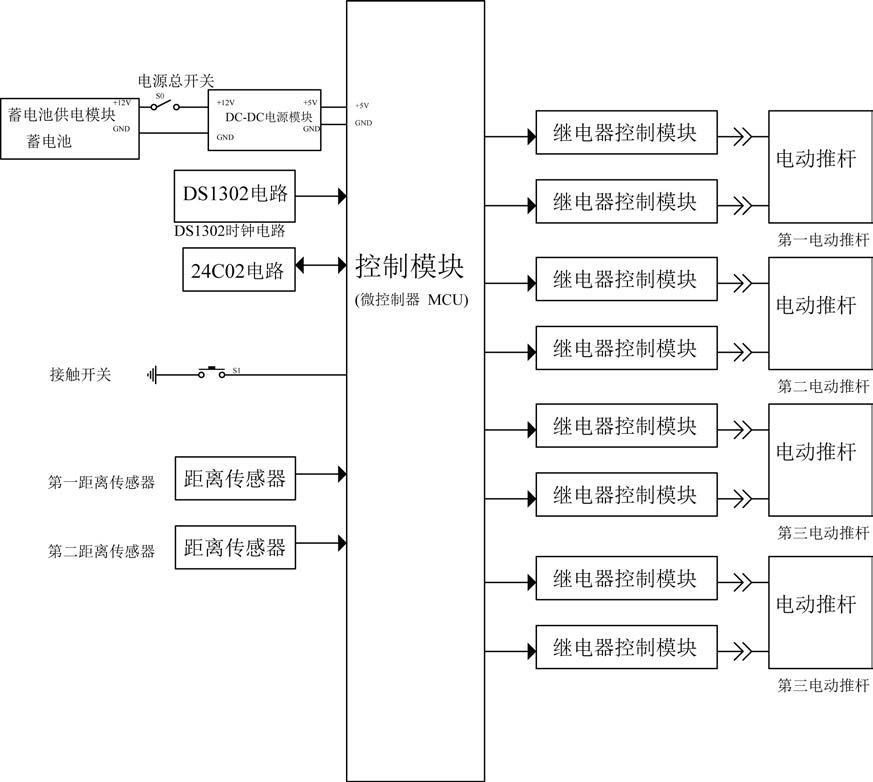
13.进一步,还包括有控制箱,支架上设有控制箱,控制箱内安装有蓄电池、控制模块和电源模块,开关电源为新一代农业智能播种设备供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;接触开关与控制模块通过电性连接,第一距离传感器和第二距离传感器均与控制模块通过电性连接,第一电动推杆、第二电动推杆和
第三电动推杆均与控制模块通过继电器控制模块连接。
14.本发明的有益效果为:1、本发明通过设有滚动机构和卡住机构,滚动机构运转并使接料筒做圆周运动并向前移动,进而能够使种子均匀洒入土壤中,待播种结束后,卡住机构使本设备停止移动,如此达到了均匀播种的效果;2本发明通过设有下料机构和接料机构,接料机构运带动下料机构运转,继而使下料机构内的种子间歇性向下流至接料筒内,达到了间歇下料的效果;3、本发明通过设有翻转机构,翻转机构运转并使接料筒内的种子向下流至土壤中,达到了自动下种的效果;4、本发明通过设有翻土机构,翻土机构运转并将土壤翻开,然后进行下种,从而达到了自动翻土的效果。
附图说明
15.图1为本发明的第一视角立体结构示意图。
16.图2为本发明的第二视角立体结构示意图。
17.图3为本发明的滚动机构立体结构示意图。
18.图4为本发明的下料机构立体结构示意图。
19.图5为本发明的接料机构第一部分立体结构示意图。
20.图6为本发明的接料机构第二部分立体结构示意图。
21.图7为本发明的翻转机构剖面立体结构示意图。
22.图8为本发明的翻土机构立体结构示意图。
23.图9为本发明的卡住机构第一部分立体结构示意图。
24.图10为本发明的卡住机构第二部分立体结构示意图。
25.图11为本发明的电路框图。
26.图12为本发明的电路原理图。
27.图中零部件名称及序号:1_支架,2_滚轮,3_把手,4_控制箱,5_接触开关,6_接料筒,7_滚动机构,71_安装架,72_外壳,73_第一转轴,74_滚筒,75_支撑架,8_下料机构,81_第一安装块,82_存料箱,83_固定块,84_第一电动推杆,85_推块,86_挡板,9_接料机构,91_第二安装块,92_第二电动推杆,93_连接板,94_第一距离传感器,95_第二距离传感器,10_翻转机构,101_齿条,102_第二转轴,103_直齿轮,104_接料板,11_翻土机构,111_安装板,112_第三电动推杆,113_铲板,12_卡住机构,121_压板,122_摩擦块,123_压杆,124_第一伸缩杆,125_第一弹簧,126_卡块,127_第二伸缩杆,128_第二弹簧。
具体实施方式
28.下面结合附图详细说明本发明的优选技术方案。
29.实施例1一种新一代农业智能播种设备,如图1
‑
7所示,包括有支架1、滚轮2、把手3、接触开关5、接料筒6、滚动机构7、下料机构8、接料机构9和翻转机构10,支架1下部内侧转动式设有滚轮2,支架1左右两侧上部均设有把手3,支架1前侧中部设有接触开关5,支架1底部前侧设
有滚动机构7,滚动机构7上滑动式设有接料筒6,滚动机构7上设有下料机构8,下料机构8与接料筒6配合,滚动机构7上设有接料机构9,接料机构9与接料筒6连接,接料机构9上设有翻转机构10,翻转机构10与滚动机构7连接。
30.人们按下电源总开关,然后触碰接触开关5,从而将本设备上电,人们再抓住把手3,然后向前推动把手3,使得支架1向前移动,使得滚轮2在地面上向前转动,如此使本设备移动,同时支架1移动使滚动机构7运转,滚动机构7带动接料机构9运转,使得接料筒6间歇性向上移动,当接料筒6向上移动时,下料机构8运转,使得下料机构8中的种子掉落至接料筒6内,随后人们进行翻土,然后接料机构9运转带动翻转机构10运转,使得接料筒6向下移回原位,同时接料筒6内的种子由于重力向下掉落至翻开的土壤中,从而达到播种的目的,待播种工作完成后,人们使本设备停止移动,使得滚轮2停止转动,然后人们再次触碰接触开关5,再按下电源总开关,将本设备断电即可。
31.滚动机构7包括有安装架71、外壳72、第一转轴73、滚筒74和支撑架75,支架1底部前侧设有安装架71,安装架71底部设有外壳72,安装架71内侧转动式设有第一转轴73,第一转轴73与外壳72转动式连接,第一转轴73左右两侧均设有支撑架75,两根支撑架75之间连接有滚筒74,滚筒74与外壳72滑动式连接。
32.人们将本设备上电后,支架1前移会带动安装架71向前移动,进而使外壳72向前移动,使得滚筒74在地面上向前转动,继而使支撑架75转动,使得第一转轴73转动,同时滚筒74转动使接料筒6做圆周运动,另外支架1前移使接料筒6向前移动,如此能够达到均匀播种的效果,待播种工作完成后,人们使支架1停止移动,使得接料筒6停止运动。
33.下料机构8包括有第一安装块81、存料箱82、固定块83、第一电动推杆84、推块85和挡板86,滚筒74内部前后两侧均设有三块第一安装块81,六块第一安装块81之间连接有存料箱82,存料箱82底侧后部设有固定块83,固定块83底部设有第一电动推杆84,第一电动推杆84的伸缩杆后侧设有推块85,推块85与固定块83滑动式连接,推块85顶部前侧设有挡板86,挡板86与存料箱82滑动式连接。
34.当接料机构9运转时,接料机构9使控制模块控制第一电动推杆84的伸缩杆伸长两秒,进而使推块85向后移动两秒,使得挡板86向后移动两秒,此时存料箱82内的种子由于重力向下掉落至接料筒6内,两秒后,挡板86停止运动,当接料机构9恢复原位时,接料机构9使控制模块控制第一电动推杆84的伸缩杆缩短两秒,使得挡板86移回原位,进而阻止存料箱82内的种子向下流出,两秒后,挡板86停止运动。
35.接料机构9包括有第二安装块91、第二电动推杆92、连接板93、第一距离传感器94和第二距离传感器95,右侧的支撑架75左侧设有第二安装块91,第二安装块91内侧设有第二电动推杆92,第二电动推杆92的伸缩杆底部设有连接板93,连接板93与接料筒6连接,连接板93与右侧的支撑架75滑动式连接,滚筒74后侧下部设有第一距离传感器94,接料筒6顶侧中部设有第二距离传感器95。
36.滚筒74转动会使第一距离传感器94做圆周运动,第一距离传感器94对其与外壳72后侧中部之间的距离进行检测,当第一距离传感器94的检测值达到了控制模块中的预设值时,控制模块会控制第二电动推杆92的伸缩杆缩短三秒,进而使连接板93向存料箱82方向移动三秒,使得接料筒6向存料箱82方向移动三秒,直至与存料箱82接触,继而使第二距离传感器95向存料箱82方向移动三秒,三秒后,控制模块控制第二电动推杆92延时四秒启动,
使得接料筒6停留四秒,四秒后,控制模块控制第二电动推杆92的伸缩杆伸长三秒,使得接料筒6和第二距离传感器95向下移回原位,同时接料筒6插进翻开的土壤中,进而进行播种,另外在第二距离传感器95上移的过程中,第二距离传感器95对其与存料箱82之间的距离进行检测,待第二距离传感器95的检测值达到了控制模块中的预设值时,控制模块会控制第一电动推杆84启动,使得存料箱82打开,当第二距离传感器95向下移动时,第二距离传感器95的检测值大于控制模块中的预设值,控制模块会控制第一电动推杆84的伸缩杆恢复原位,使得存料箱82关闭。
37.翻转机构10包括有齿条101、第二转轴102、直齿轮103和接料板104,左侧的支撑架75右侧下部设有齿条101,接料筒6上部内侧转动式设有第二转轴102,第二转轴102左侧设有直齿轮103,直齿轮103与齿条101啮合,第二转轴102上设有六块接料板104,接料板104与接料筒6滑动式连接。
38.接料筒6向存料箱82方向移动会带动第二转轴102移动,进而使接料板104和直齿轮103移动,由于齿条101与直齿轮103啮合,使得直齿轮103转动半圈,进而使第二转轴102转动半圈,继而使接料板104转动半圈,进而将接料筒6堵住,随后接料筒6进行接料,种子由于重力掉落至接料板104顶部,待接料筒6向下插进翻开的土壤中时,齿条101使直齿轮103转回原位,使得接料板104转回原位,进而将种子倒出,从而达到下种的效果。
39.实施例2在实施例1的基础之上,如图1
‑
2和图8
‑
10所示,还包括有翻土机构11,翻土机构11包括有安装板111、第三电动推杆112和铲板113,两根支撑架75后侧下部均设有安装板111,安装板111内侧设有第三电动推杆112,两根第三电动推杆112的伸缩杆之间连接有铲板113,铲板113与滚筒74滑动式连接。
40.在第一距离传感器94运动的过程中,第一距离传感器94对其与地面之间的距离进行检测,当第一距离传感器94的检测值达到了控制模块中的预设值时,控制模块会控制第三电动推杆112的伸缩杆伸长三秒,进而使铲板113从滚筒74内向外滑动,三秒后,控制模块控制第三电动推杆112延时三秒启动,使得铲板113停留三秒,同时支撑架75转动带动安装板111运动,进而使第三电动推杆112运动,使得铲板113做圆周运动并向前移动,从而间歇性将土壤翻开,达到了翻土的效果,然后进行下种,三秒后,控制模块控制第三电动推杆112的伸缩杆恢复原位,使得铲板113滑回原位,然后铲板113停止滑动。
41.还包括有卡住机构12,卡住机构12包括有压板121、摩擦块122、压杆123、第一伸缩杆124、第一弹簧125、卡块126、第二伸缩杆127和第二弹簧128,支架1下部设有四根第一伸缩杆124,四根第一伸缩杆124顶部之间连接有压板121,压板121与支架1滑动式连接,压板121下部内侧连接有摩擦块122,摩擦块122与滚轮2滑动式连接,压板121上部内侧设有压杆123,第一伸缩杆124上绕有第一弹簧125,第一弹簧125连接在压板121与支架1之间,压板121内侧滑动式设有卡块126,卡块126与支架1配合,卡块126与压板121之间连接有拉绳,卡块126与压板121之间连接有两根第二伸缩杆127,第二伸缩杆127上绕有第二弹簧128,第二弹簧128连接在卡块126与压板121之间。
42.初始状态下,第二弹簧128处于压缩状态,当人们停止使用本设备时,人们用脚向下踩住压杆123,进而使压板121向下移动,第一伸缩杆124缩短,第一弹簧125被压缩,同时压板121带动卡块126向下移动,待卡块126与支架1分开,第二弹簧128复位,使得卡块126向
前移动,继而使连接在卡块126与压板121之间的拉绳绷直,进而阻止压板121向上复位,同时卡块126上的拉绳被拉直,另外压板121下移会带动摩擦块122向下移动,随后摩擦块122与滚轮2接触,进而将滚轮2卡住,从而能够防止本设备随意移动,待人们需要再次使用本设备时,人们移开脚,然后手动使卡块126向后移回原位,随后第一弹簧125复位,使得摩擦块122、卡块126和压杆123向上移回原位。
43.如图1、图11和图12所示,还包括有控制箱4,支架1前侧下部设有控制箱4,控制箱4内安装有蓄电池、控制模块和电源模块,开关电源为新一代农业智能播种设备供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;接触开关5与控制模块通过电性连接,第一距离传感器94和第二距离传感器95均与控制模块通过电性连接,第一电动推杆84、第二电动推杆92和第三电动推杆112均与控制模块通过继电器控制模块连接。
44.上述实施例,只是本发明的较佳实施例,并非用来限制本发明实施范围,故凡以本发明权利要求所述内容所做的等效变化,均应包括在本发明权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

