基于ai驱动的高分遥感森火风险普查以及预警防控方法
技术领域
1.本发明属于森林火灾防控技术领域,尤其涉及基于ai驱动的高分遥感森火风险普查以及预警防控方法。
背景技术:
2.森林火灾涉灾范围广、无法及时发现、处理难度大、危害性严重,是世界八大自然灾害之一;它能烧毁大量森林资源,是森林生态环境的主要扰动因子,直接破坏自然环境和生态平衡;也是动植物的潜在威胁来源,直接影响工农业生产甚至威胁人民生命财产的安全。传统的森林火灾风险监测主要通过群测群防获取非重点区域的状态信息,以常规监测手段获取重点区域的状态信息,耗费大量的人力且数据获取的时效性较低。因此,研发能结合人工智能技术开展遥感应用研究,建立并优化相关遥感模型,辅助完成森林火灾风险普查的基于ai驱动的高分遥感森火风险普查以及预警防控方法成为了急需解决的技术问题。
技术实现要素:
3.本发明为解决上述问题,提供了基于ai驱动的高分遥感森火风险普查以及预警防控方法。
4.本发明的技术方案,基于ai驱动的高分遥感森火风险普查以及预警防控方法,所述风险普查以及预警防控方法基于高分遥感影像以及人工智能技术识别影像,该方法包括林区的可燃物致灾要素识别、建筑物承载要素识别、道路与水体减灾要素识别以及森林火灾监测预警传感网系统;所述可燃物致灾要素识别基于结合注意机制的林区可燃物识别,采集林区可燃物类型及其分布范围,进行可燃物遥感信息提取和专题分析,获取可燃物类型载量分布数据,生成可燃物类型图表;所述建筑物承载要素识别基于顾及地物多尺度性的林区建筑物识别,以林区内的建筑物以及基础设施作为主要的承灾体进行提取调查,获取承灾体空间分布以及灾害属性特征,建立承灾体调查成果地理信息数据库;所述道路与水体减灾要素识别包括基于拓扑连通性的林区道路水体识别,获取林区道路水体分布数据,建立森林火灾综合减灾资源数据库,并生成相应的林区道路水体减灾体图表;所述森林火灾监测预警传感网系统包括若干物联网传感器以及在线预警防控平台,所述物联网传感器均基于无人机灵活投放至林区,该物联网传感器内设有北斗模块以及n
‑
r通讯模块且基于ad
‑
hoc组网技术自组网通信;所述在线预警防控平台设有森林防火监测功能,该在线预警防控平台信号连接物联网传感器。
5.采用上述方法后,通过高分遥感影像以及人工智能技术识别影像,实现森林火灾风险调查与火情灾害防控的涉灾要素的高效与精准识别,将灾害隐患区域可视化呈现,为森林火灾隐患预警与灾后灾情处理提供关键技术支撑;通过可燃物致灾要素识别生成可燃物类型图表,便于掌握准确的林区可燃物类型及其分布范围,为森林火灾的灾前预警预测过程提供数据和技术支持,实现森林火灾常态化监测和应急响应;通过提取调查承灾体空间分布以及灾害属性特征并建立数据库,便于及时地对可能受到森林火灾影响的人民生命
财产进行紧急转移和安全撤离,实现为生态文明建设工作提供基础数据和科学决策依据;通过获取林区道路水体分布数据并生成林区道路水体减灾体图表,确保救灾时人力、物力的有针对性的精准投放,实现救灾资源的最大化利用,节约人力成本与公共资源,有效减少森林火灾所带来的人员与财产损失;通过物联网传感器信号连接在线预警防控平台,由集成传感器组实时采集林区内的各项数据,并通过在线预警防控平台对异常的数据进行预警,便于及时发现林区异常情况;通过无人机灵活投放物联网传感器,降低了建设成本,缩短部署时间,减轻运维压力;通过北斗模块获取物联网传感器的定位数据,并通过n
‑
r通讯模块将环境以及定位数据发送至在线预警防控平台,实现森林环境的监测和火情隐患的自动探知;通过ad
‑
hoc组网技术,实现设备间自组网,快速构建物联网传感器间的移动通信网络,提高对复杂林区环境的适应能力;实现实时、远程监测监控,降低人员现场巡查监测的安全风险,降低森林火灾预防成本,可在森林火灾发生时有效掌握相关信息,并进行决策指挥辅助,提升森林火灾应急反应速度和处理能力,降低因救灾慢救灾难造成的社会经济财产损失。
6.作为本发明的进一步改进,所述结合注意机制的林区可燃物识别包括通道注意机制和空间注意机制,基于人工智能模型模拟人眼球移动调用视觉系统信息处理机制,进行关注、取舍以及选择可燃物对象,生成一组实时权重系数,并将实时权重系数赋予不同可燃物要素区域。
7.采用上述方法后,通过通道注意机制可以充分考虑不同特征通道之间的相关性,空间注意机制能够考虑不同位置之间的空间依赖关系,结合人工智能模型模拟人眼球移动进行视觉系统信息处理,实现区分可燃物与非可燃物区域,并重点关注存在风险的森林可燃物区域;同时针对不同可燃物类别进行关注,缓解不同可燃物的异物同谱和边界模糊问题,实现高效准确地林区可燃物类型自动识别。
8.作为本发明的进一步改进,所述顾及地物多尺度性的林区建筑物识别包括建立动态多尺度特征模块,该动态多尺度特征模块包括多个并行排列的动态卷积模块(dcms),所述动态卷积模块均利用不同的上下文感知卷积核来学习特定尺度的语义特征表达;基于将不同感知范围的动态卷积模块之间组成并行分支,并将不同分支的特征进行融合,获取高有效性的自适应多尺度特征表达。
9.采用上述方法后,通过将动态卷积模块之间组成并行分支且将不同分支的特征融合,动态选择不同尺度的建筑物特征表达,便于在建立数学模型时针对不同尺度的建筑物地物提取到相对应的特征表达,实现准确的建筑物特征的自适应学习,提高建筑物的识别精度和效果。
10.作为本发明的进一步改进,所述基于拓扑连通性的林区道路水体识别包括建立边界和拓扑感知模块,该拓扑感知模块依次从四个不同的方向对要素特征图的行和列使用卷积操作和非线性激活,并对空间上下文信息进行建模,建立完整的拓扑连接。
11.采用上述方法后,通过捕获不同方向上的地物特征表达来构建完整的拓扑连通结构,保持道路和水体的有效连通性,便于提取出完整的有效的道路和水体信息,提高规划救灾工作的效率,减少生命以及财产损失。
12.作为本发明的进一步改进,所述森林防火监测功能设有救灾无人机以及水陆救灾船,包括以下步骤,1)获取物联网传感器采集的林区环境数据,分析计算建立数学模型;2)
设置环境相关参数的预警阈值;3)获取物联网传感器采集的烟雾浓度以及温度信息,结合多终端协同边缘算法,分析是否发生火灾,并进行报警;4)基于边缘计算算法分析火灾的态势及蔓延情况,并通过物联网传感器内的北斗模块获取灾情发生的地理位置信息;5)根据地理位置信息,启动无人机以及水陆救灾船进行现场勘探核查;6)核实火灾报警后,操作控制救灾无人机以及水陆救灾船进行灭火处置。
13.采用上述方法后,通过系统可实时获取林区的环境数据,便于系统根据实际情况及时触发预警,提升森林防火监测的效率;通过北斗模块获取灾情地理位置信息,便于根据具体经纬度信息,操作救灾无人机以及水陆救灾船进行及时的灭火处置,防止火灾事故的扩大。
14.作为本发明的进一步改进,所述水陆救灾船包括船体、控制器、水枪、卷管盘、传感器组以及数字无线网桥,所述船体设有发动机、移动轮以及活动水枪架,所述发动机固定设置在船体的尾部,该发动机连接设有推进螺旋桨进行配合联动;所述移动轮连接设置在船体的底部,该移动轮连接设有固定在船体内的驱动电机并进行配合联动;所述活动水枪架以及卷管盘固定设置在船体顶部,该活动水枪架设有与水枪相适应的固定卡扣;所述卷管盘连接设有输水软管以及卷管电机,所述卷管电机固定连接卷管盘的转动轴进行配合联动;所述输水软管的一端固定连接水枪,该输水软管的另一端连接设有输水水泵,该输水水泵内设有进水阀;所述传感器组包括液位传感器以及若干激光传感器,所述液位传感器固定设置在船体底部,所述若干激光传感器分别固定设置在船体两侧;所述数字无线网桥固定设置在船体内部,该数字无线网桥信号连接控制器、传感器组、发动机、驱动电机、卷管电机以及输水水泵。
15.采用上述方法后,通过控制器发送信号到数字无线网桥控制船体以及船体上的其他部件,通过发动机驱动推进螺旋桨转动,推动船体沿河道进行移动,当发生火灾时,通过启动卷管电机带动卷管盘转动,将输水软管连接有输水水泵的一端放入水体中,打开进水阀并启动输水水泵,通过输水软管将水送到水枪,通过将水枪卡设在固定卡扣内,调整活动水枪架使水枪的喷水口朝向火源,由水枪向火源喷水;当火源离水体较远时,通过船体两侧的激光传感器检测水体水面与岸边的高度差,检测到高度差合适的位置时冲上陆地,同时通过船体底部的液位传感器检测船体的前端离开水体时,控制驱动电机启动带动移动轮转动,由移动轮驱使船体靠近起火点,再由水枪喷水浇灭火源,且可以将水枪从固定卡扣中取出,手持进行操作;实现了日常中救灾船能沿水体、河道移动巡逻,面对火灾发生能及时移动到附近水体,并从水体中汲水浇灭火源,同时面对起火点距离水源较远时,能通过激光传感器找到与水体水面高度差合适的位置冲上陆地,随后通过移动轮驱动靠近起火点,并沿途铺设输水软管,便于在最短时间内将水运输至起火点,提高了林区减灾效率。
16.作为本发明的进一步改进,所述船体的船头部分还设有导向板,该船体还设有与卷管盘的位置相适应的放管斜槽,所述放管斜槽连通船体的侧面;所述导向板的底端向船体所在的一侧倾斜,该导向板与船体间连接设有支撑弹簧;所述水枪包括直流水枪以及喷雾水枪,所述输水软管设有输水水泵的一端还连接设有定位锚。
17.采用上述方法后,通过船体的船头部分设置导向板,并将导向板的底部向船体倾斜,在船体冲上岸时,导向板率先与岸边接触向上抬升船头,便于船体底部的移动轮接触陆地;通过设置连通船体侧面的放管斜槽,便于在卷管盘转动释放输水软管时引导进入水中,
避免输水软管在船体上堆积;通过在输水软管有输水水泵的一端设置定位锚,在河道进行汲水时能由定位锚将输水软管固定,防止救灾船上岸时将输水软管带出水体,影响输水水泵进行汲水。
附图说明
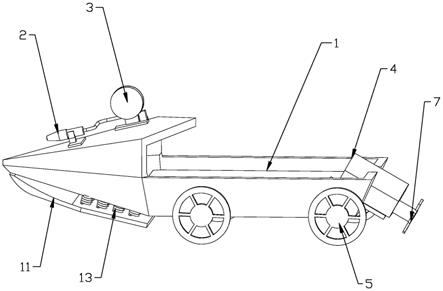
18.图1所示为本发明水陆救灾船结构示意图。
19.图2所示为推平装置支撑凸块处结构示意图。
[0020]1‑
船体,2
‑
水枪,3
‑
卷管盘,4
‑
发动机,5
‑
移动轮,6
‑
活动水枪架,7
‑
推进螺旋桨,8
‑
输水软管,9
‑
卷管电机,10
‑
输水水泵,11
‑
导向板,12
‑
放管斜槽,13
‑
支撑弹簧,14
‑
定位锚。
具体实施方式
[0021]
如图1
‑
图2所示基于ai驱动的高分遥感森火风险普查以及预警防控方法,所述风险普查以及预警防控方法基于高分遥感影像以及人工智能技术识别影像,该方法包括林区的可燃物致灾要素识别、建筑物承载要素识别、道路与水体减灾要素识别以及森林火灾监测预警传感网系统;所述可燃物致灾要素识别基于结合注意机制的林区可燃物识别,采集林区可燃物类型及其分布范围,进行可燃物遥感信息提取和专题分析,获取可燃物类型载量分布数据,生成可燃物类型图表;所述建筑物承载要素识别基于顾及地物多尺度性的林区建筑物识别,以林区内的建筑物以及基础设施作为主要的承灾体进行提取调查,获取承灾体空间分布以及灾害属性特征,建立承灾体调查成果地理信息数据库;所述道路与水体减灾要素识别包括基于拓扑连通性的林区道路水体识别,获取林区道路水体分布数据,建立森林火灾综合减灾资源数据库,并生成相应的林区道路水体减灾体图表;所述森林火灾监测预警传感网系统包括若干物联网传感器以及在线预警防控平台,所述物联网传感器均基于无人机灵活投放至林区,该物联网传感器内设有北斗模块以及n
‑
r通讯模块且基于ad
‑
hoc组网技术自组网通信;所述在线预警防控平台设有森林防火监测功能,该在线预警防控平台信号连接物联网传感器。
[0022]
通过高分遥感影像以及人工智能技术识别影像,实现森林火灾风险调查与火情灾害防控的涉灾要素的高效与精准识别,将灾害隐患区域可视化呈现,为森林火灾隐患预警与灾后灾情处理提供关键技术支撑;通过可燃物致灾要素识别生成可燃物类型图表,便于掌握准确的林区可燃物类型及其分布范围,为森林火灾的灾前预警预测过程提供数据和技术支持,实现森林火灾常态化监测和应急响应;通过提取调查承灾体空间分布以及灾害属性特征并建立数据库,便于及时地对可能受到森林火灾影响的人民生命财产进行紧急转移和安全撤离,实现为生态文明建设工作提供基础数据和科学决策依据;通过获取林区道路水体分布数据并生成林区道路水体减灾体图表,确保救灾时人力、物力的有针对性的精准投放,实现救灾资源的最大化利用,节约人力成本与公共资源,有效减少森林火灾所带来的人员与财产损失;通过物联网传感器信号连接在线预警防控平台,由集成传感器组实时采集林区内的各项数据,并通过在线预警防控平台对异常的数据进行预警,便于及时发现林区异常情况;通过无人机灵活投放物联网传感器,降低了建设成本,缩短部署时间,减轻运维压力;通过北斗模块获取物联网传感器的定位数据,并通过n
‑
r通讯模块将环境以及定位数据发送至在线预警防控平台,实现森林环境的监测和火情隐患的自动探知;通过ad
‑
hoc
组网技术,实现设备间自组网,快速构建物联网传感器间的移动通信网络,提高对复杂林区环境的适应能力;实现实时、远程监测监控,降低人员现场巡查监测的安全风险,降低森林火灾预防成本,可在森林火灾发生时有效掌握相关信息,并进行决策指挥辅助,提升森林火灾应急反应速度和处理能力,降低因救灾慢救灾难造成的社会经济财产损失。
[0023]
所述结合注意机制的林区可燃物识别包括通道注意机制和空间注意机制,基于人工智能模型模拟人眼球移动调用视觉系统信息处理机制,进行关注、取舍以及选择可燃物对象,生成一组实时权重系数,并将实时权重系数赋予不同可燃物要素区域。
[0024]
通过通道注意机制可以充分考虑不同特征通道之间的相关性,空间注意机制能够考虑不同位置之间的空间依赖关系,结合人工智能模型模拟人眼球移动进行视觉系统信息处理,实现区分可燃物与非可燃物区域,并重点关注存在风险的森林可燃物区域;同时针对不同可燃物类别进行关注,缓解不同可燃物的异物同谱和边界模糊问题,实现高效准确地林区可燃物类型自动识别。
[0025]
所述顾及地物多尺度性的林区建筑物识别包括建立动态多尺度特征模块,该动态多尺度特征模块包括多个并行排列的动态卷积模块(dcms),所述动态卷积模块均利用不同的上下文感知卷积核来学习特定尺度的语义特征表达;基于将不同感知范围的动态卷积模块之间组成并行分支,并将不同分支的特征进行融合,获取高有效性的自适应多尺度特征表达。
[0026]
通过将动态卷积模块之间组成并行分支且将不同分支的特征融合,动态选择不同尺度的建筑物特征表达,便于在建立数学模型时针对不同尺度的建筑物地物提取到相对应的特征表达,实现准确的建筑物特征的自适应学习,提高建筑物的识别精度和效果。
[0027]
所述基于拓扑连通性的林区道路水体识别包括建立边界和拓扑感知模块,该拓扑感知模块依次从四个不同的方向对要素特征图的行和列使用卷积操作和非线性激活,并对空间上下文信息进行建模,建立完整的拓扑连接。
[0028]
通过捕获不同方向上的地物特征表达来构建完整的拓扑连通结构,保持道路和水体的有效连通性,便于提取出完整的有效的道路和水体信息,提高规划救灾工作的效率,减少生命以及财产损失。
[0029]
所述森林防火监测功能设有救灾无人机以及水陆救灾船,包括以下步骤,1)获取物联网传感器采集的林区环境数据,分析计算建立数学模型;2)设置环境相关参数的预警阈值;3)获取物联网传感器采集的烟雾浓度以及温度信息,结合多终端协同边缘算法,分析是否发生火灾,并进行报警;4)基于边缘计算算法分析火灾的态势及蔓延情况,并通过物联网传感器内的北斗模块获取灾情发生的地理位置信息;5)根据地理位置信息,启动无人机以及水陆救灾船进行现场勘探核查;6)核实火灾报警后,操作控制救灾无人机以及水陆救灾船进行灭火处置。
[0030]
通过系统可实时获取林区的环境数据,便于系统根据实际情况及时触发预警,提升森林防火监测的效率;通过北斗模块获取灾情地理位置信息,便于根据具体经纬度信息,操作救灾无人机以及水陆救灾船进行及时的灭火处置,防止火灾事故的扩大。
[0031]
所述水陆救灾船包括船体1、控制器、水枪2、卷管盘3、传感器组以及数字无线网桥,所述船体1设有发动机4、移动轮5以及活动水枪架6,所述发动机4固定设置在船体1的尾部,该发动机4连接设有推进螺旋桨7进行配合联动;所述移动轮5连接设置在船体1的底部,
该移动轮5连接设有固定在船体1内的驱动电机并进行配合联动;所述活动水枪架6以及卷管盘3固定设置在船体1顶部,该活动水枪架6设有与水枪2相适应的固定卡扣;所述卷管盘3连接设有输水软管8以及卷管电机9,所述卷管电机9固定连接卷管盘3的转动轴进行配合联动;所述输水软管8的一端固定连接水枪2,该输水软管8的另一端连接设有输水水泵10,该输水水泵10内设有进水阀;所述传感器组包括液位传感器以及若干激光传感器,所述液位传感器固定设置在船体1底部,所述若干激光传感器分别固定设置在船体1两侧;所述数字无线网桥固定设置在船体1内部,该数字无线网桥信号连接控制器、传感器组、发动机4、驱动电机、卷管电机9以及输水水泵10。
[0032]
通过控制器发送信号到数字无线网桥控制船体1以及船体1上的其他部件,通过发动机4驱动推进螺旋桨7转动,推动船体1沿河道进行移动,当发生火灾时,通过启动卷管电机9带动卷管盘3转动,将输水软管8连接有输水水泵10的一端放入水体中,打开进水阀并启动输水水泵10,通过输水软管8将水送到水枪2,通过将水枪2卡设在固定卡扣内,调整活动水枪架6使水枪2的喷水口朝向火源,由水枪2向火源喷水;当火源离水体较远时,通过船体1两侧的激光传感器检测水体水面与岸边的高度差,检测到高度差合适的位置时冲上陆地,同时通过船体1底部的液位传感器检测船体1的前端离开水体时,控制驱动电机启动带动移动轮5转动,由移动轮5驱使船体1靠近起火点,再由水枪2喷水浇灭火源,且可以将水枪2从固定卡扣中取出,手持进行操作;实现了日常中救灾船能沿水体、河道移动巡逻,面对火灾发生能及时移动到附近水体,并从水体中汲水浇灭火源,同时面对起火点距离水源较远时,能通过激光传感器找到与水体水面高度差合适的位置冲上陆地,随后通过移动轮5驱动靠近起火点,并沿途铺设输水软管8,便于在最短时间内将水运输至起火点,提高了林区减灾效率。
[0033]
所述船体1的船头部分还设有导向板11,该船体1还设有与卷管盘3的位置相适应的放管斜槽12,所述放管斜槽12连通船体1的侧面;所述导向板11的底端向船体1所在的一侧倾斜,该导向板11与船体1间连接设有支撑弹簧13;所述水枪2包括直流水枪以及喷雾水枪,所述输水软管8设有输水水泵10的一端还连接设有定位锚14。
[0034]
通过船体1的船头部分设置导向板11,并将导向板11的底部向船体1倾斜,在船体1冲上岸时,导向板11率先与岸边接触向上抬升船头,便于船体1底部的移动轮5接触陆地;通过设置连通船体1侧面的放管斜槽12,便于在卷管盘3转动释放输水软管8时引导进入水中,避免输水软管8在船体1上堆积;通过在输水软管8有输水水泵10的一端设置定位锚14,在河道进行汲水时能由定位锚14将输水软管8固定,防止救灾船上岸时将输水软管8带出水体,影响输水水泵10进行汲水。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

