1.本实用新型涉及机器人关节轴领域,具体地,涉及一种结合电机、减速器和驱动器的扁平机器人关节装置。
背景技术:
2.目前机器人关节部分由电极、减速器和编码器组成,结构复杂,安装繁复,体积较大,目前还没有一种将电机和行星齿轮减速器设计成一个平面的模块。
3.经检索发现,申请号为cn202010163336.5的中国专利公开了一种扁平机器人关节模块,该关节模块包括外转子电机组件和谐波减速器组件,外转子电机组件将电能转换成旋转动能,产生旋转运动输出至谐波减速器组件;谐波减速器组件对外转子电机组件输出的旋转运动进行减速;谐波减速器组件套接于外转子电机组件的外层,并形成位于同一平面的套环结构,谐波减速器组件形成套环结构的外环,外转子电机组件形成所述套环结构的内环。但是上述专利部件将谐波减速器组件位于模块的外圈,外转子电机位于模块的内部,而该布置结构受谐波减速器结构影响,体积不能做的更小;而且谐波减速器的成本较高。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型的目的是提供一种结合电机、减速器和驱动器的扁平机器人关节装置。
5.本实用新型提供一种结合电机、减速器和驱动器的扁平机器人关节装置,包括:
6.外转子电机组件,所述外转子电机组件将电能转换成旋转动能输出旋转扭矩;
7.与所述外转子电机组件设置于同一平面的行星齿轮减速器组件,且所述行星齿轮减速器组件套接于所述外转子电机组件的内圈,两者构成扁平状结构;所述行星齿轮减速器组件接受所述外转子电机组件输出的旋转扭矩,并对旋转运动进行减速,提高输出扭矩,降低所述外转子电机组件的旋转速度;
8.与外转子电机组件连接的驱动控制板,所述驱动控制板设置于所述扁平状结构的一端,并作为所述外转子电机组件、所述行星齿轮减速器组件的端盖;所述驱动控制板为所述外转子电机组件提供电能,以及能接受外部的通讯命令,并根据所接收的命令对所述外转子电机组件进行速度环、电流环和位置环的控制。
9.优选地,所述驱动控制板包括:
10.通讯部件,所述通讯部件接受外部命令并将所接收的外部命令解析成关节装置运动的速度环、电流环和位置环的工作模式,并输出所述工作模式;
11.编码器,用于检测所述行星齿轮减速器组件行星架的旋转速度和旋转位置信息,编码器的输出端与处理器相连接,将检测的旋转速度和旋转位置信息传递给处理器;
12.具备计算和通讯功能的处理器,所述处理器根据接受外部命令,对所述外转子电机组件进行位置环、速度环和电流环的操控,并通过驱动部件的电流检测电路实时监测所
述外转子电机组件的电流大小,通过所述编码器实时监测关节装置的旋转速度和旋转位置;
13.驱动部件,所述驱动部件将所述处理器输出的pwm电压信号转化成具有电流强度的电能给所述外转子电机组件,驱动所述外转子电机组件进行旋转运动输出。
14.优选地,所述通讯部件包括:can总线、485总线、rs232总线或ethercat总线的任一种通讯总线。
15.优选地,所述驱动部件包括:mosfet驱动、igbt驱动、晶闸管、三极管或可控硅的任一种驱动模式。
16.优选地,所述外转子电机组件包括:
17.机壳,所述机壳设有外环和内环,由所述外环和所述内环构成环状空间;
18.设置于所述内环的内壁上起支撑作用的第一轴承,通过所述第一轴承将所述机壳与所述行星齿轮减速器组件的行星架连接;
19.设置于所述内环的外壁上的外框电机绕组,当给所述外框电机绕组施加电能时,能产生磁场;
20.设置于所述外框电机绕组外围的环形磁钢,所述环形磁钢将所述外框电机绕组包裹;所述环形磁钢和所述外框电机绕组的最外端保留空气间隙;
21.设置于所述环形磁钢外围的环形磁轭,所述环形磁轭进行磁力线的疏导;
22.电机转子与所述环形磁轭、所述外框电机绕组、所述机壳同轴设置;所述电机转子端面和所述环形磁轭侧面刚性连接,所述环形磁轭带动所述电机转子转动;当所述电机转子运动到指定位置的所述环形磁钢时,所述外框电机绕组的线圈通电并产生磁场,与所述环形磁钢进行电磁力的斥力运动,使所述环形磁钢、所述环形磁轭做旋转运动,从而带动所述电机转子进行旋转;
23.设置于所述内环的内壁上起支撑作用的第二轴承,通过所述第二轴承将所述电机转子与所述行星齿轮减速器组件的行星齿轮保持架连接。
24.优选地,所述电机转子为一种扁平圆柱体。
25.优选地,所述环形磁钢包括多个磁钢,多个所述磁钢均匀地固定于所述环形磁轭的内侧形成环形结构,并包裹于所述外框电机绕组外围。
26.优选地,所述行星齿轮减速器组件包括:
27.内齿圈,所述内齿圈的内壁沿环向设有齿轮;所述内齿圈固定于所述机壳的内环内壁上,所述内齿圈的外圆与所述机壳的内环内壁的内圆相接触;
28.设置于所述内齿圈中心位置的太阳轮,所述太阳轮一端与所述电机转子连接,由所述电机转子带动所述太阳轮进行旋转,所述太阳轮的另一端为齿轮;
29.对称分布于所述齿轮与所述内齿圈之间的若干行星轮,且若干行星轮围绕着所述齿轮的外齿分布并与所述齿轮啮合,且所述行星轮外部与所述内齿圈啮合,通过所述齿轮带动所述行星轮围绕所述太阳轮转动;
30.与所述行星轮的中心连接的所述行星架,通过所述太阳轮的齿轮带动所述行星轮围绕所述太阳轮转动,从而带动所述行星架转动,所述行星架提供一定减速比下的扭矩输出;
31.用于支持所述行星轮的行星齿轮保持架;所述行星齿轮保持架与所述行星架配
合,将所述行星轮夹在所述行星齿轮保持架和所述行星架中间,且所述行星齿轮保持架和所述行星架同步旋转。
32.优选地,所述行星轮的数量至少为两个。
33.与现有技术相比,本实用新型具有如下至少一种的有益效果:
34.本实用新型上述扁平机器人关节装置,对外转子电机组件的布置结构作出创新性的改进,将外转子电机设置于外圈,行星齿轮减速器设置于内圈,利用行星齿轮减速器对空间结构约束较小特性,使得整体结构的体积较谐波减速器可以做的更小,整个关节装置结构更紧凑,成本更低,整机尺寸更小巧,更薄,更加适合对空间要求更高,成本要求更低的场合。
35.本实用新型上述扁平机器人关节装置,结构紧凑,将电机和行星齿轮减速器组件整合在同一个平面内,设计为扁平状结构,并使其体积更小;作为服务机器人、工业机器人和协作机器人的关节装置,具有很好的操作性和通用性,具有广泛推广意义。
附图说明
36.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
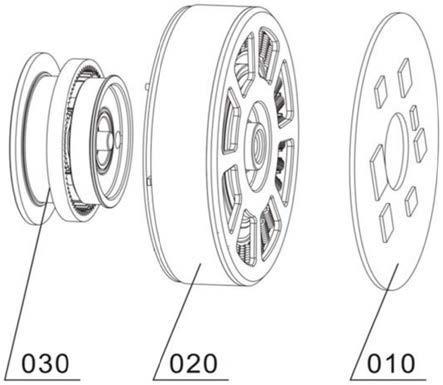
37.图1为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的结构示意图;
38.图中:010为驱动控制板,020为外转子电机组件,030为行星齿轮减速器组件;
39.图2为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的外形图;
40.图3为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的驱动控制板的处理器电路原理图;
41.图4为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的驱动控制板的驱动部件电路原理图;
42.图5为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的的外形图;
43.图6为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的外转子电机组件的结构示意图;
44.图中:021为机壳,022为第一轴承,023为外框电机绕组,024为环形磁钢,025 为环形磁轭,026为电机转子,027为第二轴承,0210为内环,0211为外环;
45.图7a为本实用新型外转子电机组件配合关系的外转子电机组件机壳示意图;
46.图7b为本实用新型外转子电机组件配合关系的外转子电机组件机壳和第一轴承、第二轴承配合示意图;
47.图7c为本实用新型外转子电机组件配合关系的外转子电机组件机壳和外框电机绕组配合示意图;
48.图8为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的行星减速器组件的外形图;
49.图9为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节
装置的的行星减速器组件的结构示意图;
50.图中:031为太阳轮,032为行星轮,033为内齿圈,034为行星架,035为行星齿轮保持架。
具体实施方式
51.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进。这些都属于本实用新型的保护范围。
52.参照图1所示,为本实用新型一优选实施例的结合电机、减速器和驱动器的扁平机器人关节装置的结构示意图,包括外转子电机组件020、行星齿轮减速器组件030和驱动控制板010;
53.其中,外转子电机组件020将驱动控制板010提供的电能转换成旋转动能,进行旋转扭矩输出给行星齿轮减速器组件030。
54.行星齿轮减速器组件030与外转子电机组件020位于同一平面,且行星齿轮减速器组件030套接于外转子电机组件020的内圈,构成扁平状结构,参照图2所示。该扁平状结构的外环0211为外转子电机组件020,内环0210是行星齿轮减速器组件030;行星齿轮减速器组件030接受外转子电机组件020提供的旋转运动,并对外转子电机组件 020输出的旋转运动进行一定比例的转速降低和扭矩提高,从而提高输出扭矩,降低旋转速度。
55.驱动控制板010与外转子电机组件020连接。驱动控制板010为一种具备通讯、控制和驱动的电路板卡,为整个关节装置提供驱动电流。驱动控制板010设置于扁平状结构的一端,驱动控制板010直接作为外转子电机组件020和行星齿轮减速器组件030的端盖,与外转子电机组件020连接,对外转子电机组件020的电极绕组提供电能,接受行星齿轮减速器组件030的行星架034所对应的编码器信号进行速度环和位置环的控制,并检测外转子电机组件020外框电机绕组023的电流,进行电流环控制和过流保护。
56.在其他部分优选实施例中:驱动控制板010由通讯部件、处理器、驱动部件和编码器组成;
57.其中,通讯部件接受外部命令并将所接受的外部命令解析成关节装置运动的速度环运动模式、位置环运动模式和电流环运动模式的工作模式,但不限于上述工作模式。并将扁平机器人关节装置的工作模式进行输出。作为一优选方式,通讯部件包括can总线、 485总线、rs232总线或ethercat总线的任一种通讯总线。
58.编码器的输入端与行星齿轮减速器组件030的行星架034相连接,检测行星架034 的旋转速度和位置等信息,编码器的输出端与处理器相连接,将关节装置的旋转速度和旋转位置信息传递给处理器。
59.处理器是具备一定计算和通讯能力的芯片。处理器的输入端与通讯部件的输出端连接,处理器根据接受外部命令,对外转子电机组件进行位置环、速度环和电流环的操控,并通过驱动部件的电流检测电路实时监测外转子电机组件的电流大小,通过编码器实时监测关节装置的旋转速度和旋转位置。处理器采用市售芯片microchip公司的dspic30f4011或ti公司的tms320lf28335或st公司的stm32f105、stm32f407。参照图3所示为处理器的电
路原理图。
60.驱动部件的输入端与处理器的输出端连接,驱动部件的输出端与外转子电机组件连接。驱动部件将处理器输出的pwm电压信号转化成具有电流强度的电能给外转子电机组件,驱动外转子电机组件进行旋转运动输出。参照图4所示为驱动部件的电路原理图。作为一优选方式,驱动部件包括mosfet驱动、igbt驱动、晶闸管、三极管或可控硅的任一种驱动模式。
61.在其他部分优选实施例中:参照图5、图6所示,外转子电机组件包括机壳021、第一轴承022、外框电机绕组023、环形磁钢024、环形磁轭、电机转子026和第二轴承 027;其中,
62.机壳021为外转子电机组件的外壳,起到保护作用。参照图7a所示,机壳021包括外环0211和内环0210,由外环0211和内环0210构成环状空间。
63.第一轴承022设置于内环0210的内壁上,通过第一轴承022将机壳021与行星齿轮减速器组件030的行星架034连接,起到支撑作用。
64.外框电机绕组023是一种缠绕了对称线圈的绕组。参照图7c所示,外框电机绕组 023设置于内环0210的外壁上,当线圈施加电能时,能产生磁场。
65.环形磁钢024设置于外框电机绕组023外围;作为一优选方式,环形磁钢024由若干磁钢组成的环形结构。若干磁钢均匀固定环形磁轭025内侧,并将外框电机绕组023 包裹;环形磁钢024和外框电机绕组023的最外端保留一定距离的空气间隙。环形磁钢 024的材质是一种具备永磁特性的合金,当电机转子026运动到指定位置的环形磁钢024 时,线圈通电并产生磁场,与环形磁钢024进行电磁力的斥力运动,使得电机旋转。作为一优选方式,环形磁钢024的材质包括但不限于以下材质:稀土永磁材料(钕铁硼 nd2fe14b)、钐钴(smco)、铝镍钴(alnico)和铁氧体永磁材料(ferrite)。
66.环形磁轭025设置于环形磁钢024的外围,环形磁轭025是一种不生产磁场、在磁路中只起磁力线传输的软磁材料,进行磁力线的疏导。
67.电机转子026为一种扁平圆柱体,电机转子026的轴心和环形磁轭025、外框电机绕组023、机壳021同轴,电机转子026端面和环形磁轭025侧面刚性连接,被环形磁轭025带动转动。当电机转子026运动到指定位置的环形磁钢024时,外框电机绕组023 的线圈通电并产生磁场,与环形磁钢024进行电磁力的斥力运动,使得环形磁钢024、环形磁轭025的旋转运动,从而带动电机转子026进行旋转。
68.第二轴承027设置于内环0210的内壁上,通过第二轴承027将电机转子026与行星齿轮减速器组件030的行星齿轮保持架035连接,起到支撑作用。
69.整个外转子电机组件020配合关系为:参照图7a、图7b所示,机壳021内环0210 内壁通过第一轴承022和第二轴承027将行星齿轮减速器组件030固定支撑。参照图7c 所示,机壳021内环0210外壁固定外框电机绕组023,环形磁钢024、环形磁轭025和电机转子026在外框电机绕组023的磁力作用下旋转,电机转子026连接行星齿轮减速器组件030的太阳轮031并驱使它旋转,在行星齿轮减速器组件030的作用下降低转速。
70.在其他部分优选实施例中:参照图8、图9所示,行星齿轮减速器组件030由内齿圈033、太阳轮031和行星架034组成;
71.其中,内齿圈033的内壁沿环向设有齿轮,内齿圈033固定于外转子电机组件的机壳021内环0210内壁上,内齿圈033的外圆与机壳021内环0210内壁的内圆相接触。
72.太阳轮031设置于内齿圈033中心位置,太阳轮031一端与外转子电机组件的电机转子026连接,由外转子电机组件的电机转子026带动太阳轮031进行旋转,太阳轮031 的另一端为齿轮。
73.若干行星轮032对称分布于太阳轮031外齿和内齿圈033之间,且若干行星轮032 围绕着太阳轮031外齿分布,若干行星轮032与太阳轮031的齿轮啮合,且行星轮032 外部与内齿圈033啮合。由太阳轮031外齿带动行星轮032围绕太阳轮031转动。行星轮032的数量至少为两个。
74.行星架034与行星轮032的中心连接,通过太阳轮031的齿轮带动行星轮032围绕太阳轮031转动,从而带动行星架034转动,由行星架034提供一定减速比下的扭矩输出。
75.行星齿轮保持架035与行星架034配合,将行星轮032夹在行星齿轮保持架035和行星架034中间,起到支持行星轮032的作用;且行星齿轮保持架035和行星架034同步旋转。
76.上述实施例的结合电机、减速器和驱动器的扁平机器人关节装置的工作原理如下:内齿圈033固定,由外转子电机组件020的电机转子026将旋转动力传递给太阳轮031,太阳轮031外齿和内齿圈033之间对称分布行星轮032,并由太阳轮031外齿带动行星轮032围绕太阳轮031转动,若干行星轮032中心连接到行星架034,并带动行星架034 旋转,由行星架034将旋转运动输出,并将外转子电机组件旋转的转速降低,扭矩增加。
77.本实用新型结构紧凑,在一个平面将电机和减速器进行整合,并将电机、减速器、驱动器、控制器和编码器整合在一个模块上,作为服务机器人、工业机器人和协作机器人的关节装置,具有很好的操作性和通用性,具有广泛推广意义。
78.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

