1.本技术涉及机器人领域,特别是涉及一种标定杆、重力加速度方向的标定系统及其标定方法。
背景技术:
2.在实现工业机器人拖动示教功能时,需要应用动力学算法计算平衡机器人本体及负载的重力矩所需要的各轴电机的输出力矩。考虑到机器人有可能不是安装在与地面水平的平面,而是安装在与地面平面成一个角度的平面(例如壁装,倒装),此时重力加速度方向与机器人基础坐标系z轴方向不再重合,所以控制系统需要知道重力加速度方向在机器人基础坐标系中的向量。
技术实现要素:
3.本技术主要解决的技术问题是提供一种标定杆、重力加速度方向的标定系统以及标定方法,本技术的标定杆结构简单,而且利用该标定杆对重力加速度方向进行标定的操作方法简单,可以在短时间内完成重力加速度方向的标定,且成本较低,有利于节省工业成本。
4.为解决上述技术问题,本技术采用的第一个技术方案是:提供一种标定杆,该标定杆包括:安装部,至少包括一安装面;连接杆,连接杆的第一端连接安装部,连接杆与安装面垂直;水平仪,连接杆的第二端连接水平仪,水平仪用于判断连接杆与水平面是否垂直。
5.为解决上述技术问题,本技术采用的第二个技术方案是:提供一种机器人的重力加速度方向的标定系统,该标定系统包括上述任一实施例的标定杆、机器人本体以及控制器;机器人本体包括多个依次轴接/枢接的连接轴,标定杆的安装面与机器人本体的末端法兰连接;控制器与每一个连接轴耦接;控制器用于在通过水平仪检测到连接杆与水平面垂直时,获取每一个连接轴相对于各自坐标系的轴角度;依据每个连接轴的轴角度确定机器人的末端法兰坐标系到机器人的基础坐标系的变换矩阵;基于变换矩阵获取机器人重力加速度方向在机器人的基础坐标系下的向量;其中,机器人的重力加速度方向在机器人的基础坐标系下的向量为末端法兰坐标系的z轴方向在基础坐标系的向量。
6.为解决上述技术问题,本技术采用的第三个技术方案是:提供一种机器人的重力加速度方向的标定方法,该标定方法包括当标定杆的连接杆垂直于水平仪,同时连接杆垂直于安装面,并通过水平仪检测到连接杆与水平面垂直时,获取机器人的每一个连接轴相对于各自坐标系的轴角度;其中,标定杆为上述任一实施例的标定杆;标定杆的安装面与机器人的末端法兰固定连接;依据每一个连接轴相对于各自坐标系的轴角度确定机器人的末端法兰坐标系与机器人的基础坐标系之间的变换矩阵;基于变换矩阵获取机器人重力加速度方向在机器人的基础坐标系下的向量;其中,机器人的重力加速度方向在机器人的基础坐标系下的向量为末端法兰坐标系的z轴方向在基础坐标系的向量。
7.本技术的有益效果是:区别于现有技术,本技术的标定杆包括:安装部、连接杆以
及水平仪;连接杆与安装部的安装面垂直连接,水平仪用于检测连接杆是否与水平面垂直,以确定机器人重力加速度方向在机器人的基础坐标系下的向量。本技术的标定杆结构简单,而且利用该标定杆对机器人的重力加速度方向进行标定的操作方法简单,可以在短时间内完成重力加速度方向的标定,且成本较低,有利于节省工业成本。
附图说明
8.图1是本技术标定杆一实施方式的结构示意图;
9.图2是本技术标定杆另一实施方式的结构示意图;
10.图3是本技术机器人的重力加速度方向的标定系统一实施方式的结构示意图;
11.图4是本技术机器人的重力加速度方向的标定方法一实施方式的流程示意图。
具体实施方式
12.本技术提供一种标定杆、重力加速度方向的标定系统以及标定方法,为使本技术的目的、技术方案和技术效果更加明确、清楚,以下对本技术进一步详细说明,应当理解此处所描述的具体实施条例仅用于解释本技术,并不用于限定本技术。
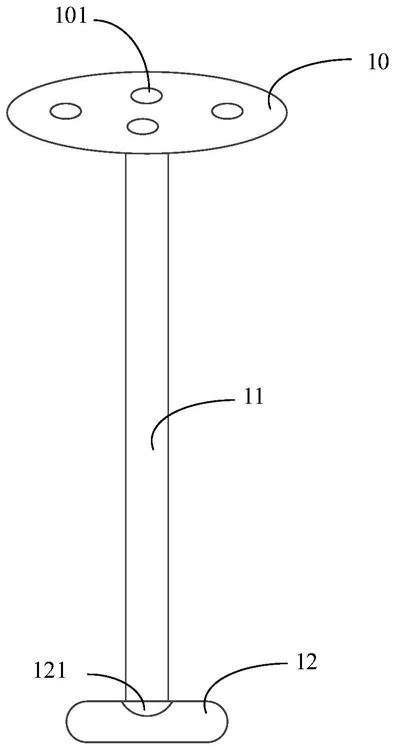
13.为清楚说明上述标定杆,请参阅图1,图1是本技术标定杆一实施方式的结构示意图。
14.如图1所示,在本实施方式中,标定杆包括安装部、连接杆11以及水平仪12。安装部至少包括一安装面10,连接杆11的第一端连接安装部,连接杆11的第二端连接水平仪12,连接杆11与安装面10垂直。在一些实施方式中,连接杆11还可以与水平仪12垂直。此标定杆可以在短时间内完成机器人重力加速度方向的标定。
15.具体地,安装面10可与机器人的末端连接。可选地,安装面10可以与机器人的末端进行卡接,以方便标定杆的安装与拆卸;安装面10上还可以设置有至少一个螺孔,例如2个、3个或者4个螺孔等,安装面10通过该螺孔与机器人的末端的法兰连接,此种连接方式使标定杆连接的更加稳固;在其他可替代的实施例中,安装面10与机器人的末端还可以通过焊接、粘接的方式进行连接,具体可根据实际情况进行选择。安装面10的形状可以为圆形、方形、椭圆形等。优选地,安装面10的形状为圆形,以使得安装面10的受力更加均匀。
16.水平仪12用于检测连接杆11是否与水平面垂直。本实施例中,水平仪12内部设置有标定物12,当标定物121到达预定位置时,可以确定连接杆11与地面垂直,进而获知机器人重力加速度方向以及重力加速度方向在机器人的基础坐标系下的向量。其中,基础坐标系是以机器人的基座的安装平面为x轴,以垂直于安装平面方向为z轴而建立的坐标系。
17.进一步地,在一个具体的实施例中,标定物121为气泡,预定位置为水平仪12的水平中间位置。例如,水平仪12为圆柱形水平仪,水平仪12内充满醚或酒精,并留有一小气泡,根据气泡的位置确定水平仪12与地面是否垂直,当气泡处于水平仪12的水平中间位置时,水平仪12与地面平行,进而确定连接杆11与地面垂直,此时机器人的末端法兰所朝向的方向即为重力加速度的方向。
18.在另一个实施方式中,水平仪12内还可以充满有不同密度以及不同颜色的两种不相容的液体,可以依据两种液体的分界线确定水平仪12与水平面是否平行,进而确定连接杆11与水平面是否垂直。
19.在其他可替代的实施例中,水平仪12还可以为电子水平仪,电子水平仪主要包括电感式和电容式等两种。电子水平仪是以电容摆的平衡原理测量被测面相对水平面微小倾角的测量器具。电子水平仪测量结果准确且测量过程简单。
20.在实际应用过程中,为了保证测量的精确性,需保证水平仪12能够在与安装面10平行的平面内转动,以调整水平仪12的重心,进而减小微小的测量误差。
21.为了使水平仪12能够在与安装面10平行的平面内转动的功能,连接杆11可以包括一活动连接部。在其中的一个实施方式中,活动连接部与安装部连接,以使连接杆11的第一端与安装部活动连接,连接杆11的第二端与水平仪12固定连接,且连接杆11与水平仪12垂直,以通过连接杆11转动带动水平仪12在与安装面10平行的平面内转动。通过此种方式使得水平仪12可以在与安装面10平行的平面内360度旋转,这样就可以判断水平仪12在各个方向是否都水平,从而能够提高检测结果的准确性。
22.在另一个实施方式中,活动连接部与水平仪12连接,即连接杆11的一端与安装部固定连接,另一端与水平仪12活动连接,以使水平仪12可在与安装面10平行的平面内转动。此种方式也可使水平仪12能够在与安装面10平行的平面内360度旋转,以判断水平仪12在各个方向是否都水平,从而能够提高检测结果的准确性。
23.在其他实施方式中,如图2所示,图2是本技术标定杆另一实施方式的结构示意图。区别于上述实施例,本实施例的连接杆11包括第一连接杆111以及第二连接杆112;第一连接杆111的第一端与安装部固定连接,第二连接杆112的第一端与水平仪固定连接;第一连接杆111的第二端与第二连接杆112的第二端活动连接,以通过第二连接杆112的转动带动水平仪在与安装面10平行的平面内转动。此种方式可以判断水平仪12在各个方向是否都水平,从而能够提高检测结果的准确性。
24.在其中的一个具体的实施方式中,第一连接杆111的第二端设置有卡槽,第二连接杆112的第二端设置有卡接部,卡接部的横截面积朝远离第二连接杆112的第二端的方向逐渐增大。例如,卡接部可为球状突起,突起部嵌入卡槽内,以使第一连接杆111的第二端与第二连接杆112的第二端活动连接。当然,也可以有其他活动连接的方式,但需保证第一连接杆111与第二连接杆112相对转动时摩擦力很小。
25.在另一些实施方式中,第一连接杆111和第二连接杆112还可通过一活动连接部进行活动连接。该活动连接部可以为至少一个轴承,在一些具体的实施方式中可以为滚动轴承和/或滑动轴承。在一个具体的实施方式中,第一连接杆111一端嵌入轴承内圈固定,第二连接杆112的一端与外圈固定。或者连接杆11的一端与轴承的内圈或外圈固定,轴承的外圈或内圈与安装部或水平仪12固定。当然,在其他实施方式中可以根据需要调整轴承的数量、种类或者具体的固定连接位置,在此不再赘述。
26.上述任一实施方式的标定杆主要应用于机器人的重力加速度标定,以获知机器人重力加速度方向在机器人的基础坐标系下的向量,进而能够依据逆动力学模型确定每个轴的输出力矩。特别是在,机器人的拖动示教中,需要应用动力学算法计算平衡机器人本体及负载的重力矩所需要的各轴电机的输出力矩。由于机器人有可能不是安装在与地面水平的平面,而是安装在与地面平面成一个角度的平面(例如壁装,倒装),此时重力加速度方向与机器人基础坐标系z轴方向不再重合,因此,需要知道重力加速度方向在机器人基础坐标系中的向量表达。本技术的标定杆可以很好的解决此问题,关于利用该标定杆进行重力加速
度方向在机器人基础坐标系中的向量表达的标定方法,后续会进行详细说明。
27.区别于现有技术,本技术的标定杆包括:安装部、连接杆以及水平仪。本技术的标定杆结构简单,而且利用该标定杆对重力加速度方向进行标定的操作方法简单,可以在短时间内完成重力加速度方向的标定,较于传感器相比成本较低,有利于节省工业成本。且水平仪能够在与安装面10平行的平面内转动,可以减小测量误差,从而提高测量的精确性。
28.参阅图3,图3是本技术机器人的重力加速度方向的标定系统一实施方式的结构示意图。上述任一实施方式的标定杆适用于本实施方式的标定系统。上述任一实施方式的标定杆主要应用于机器人本体的安装平面与水平面不水平的情况,即安装平面与水平面存在角度差,例如,壁装或者倒装。
29.在图3中,箭头q所指的为水平面(或与水平面平行的平面),箭头p所指的是安装平面,安装平面与水平面成一个角度a,则机器人的重力加速度的方向与机器人基础坐标系z轴方向不重合。其中,基础坐标系是以机器人的基座的安装平面为x轴,以垂直于安装平面方向为z轴而建立的坐标系。
30.在本实施例的标定系统包括标定杆、机器人本体以及控制器;其中,控制器可以是内置在机器人内;也可以是外接控制器,例如,外接控制器为外接电脑。
31.在本实施方式中,标定杆为上述任一实施例标定杆,关于标定杆的结构请参阅图1-2及相关的文字说明,在此不再赘述。
32.机器人本体包括多个依次轴接/枢接的连接轴,标定杆的安装面与机器人本体的末端连接;控制器与每一个连接轴耦接。
33.本实施例中,控制器用于在通过水平仪检测到述连接杆与水平面垂直时,获取每一个连接轴相对于各自坐标系的轴角度;依据每个连接轴的轴角度确定机器人的末端法兰坐标系到机器人的基础坐标系的变换矩阵;基于变换矩阵获取机器人重力加速度方向在机器人的基础坐标系下的向量;其中,机器人的重力加速度方向在机器人的基础坐标系下的向量与末端法兰坐标系的z轴方向在基础坐标系的向量相同。
34.在实际应用场景中,由于机器人末端法兰的朝向主要与机器人的最后三个轴有关,因此,为了便于调整机器人的末端法兰的姿态,如图3,可以调整第一连接轴30以及第二连接轴31,进而调整机器人末端法兰的姿态,使得机器人的末端的方向竖直朝下,当标定杆的水平仪内的标定物处于中间水平位置时,即机器人末端(俗称的第6轴)完全垂直于地面,此时机器人的末端法兰所朝向的方向与重力加速度的方向一致,可以开始对机器人重力加速度向量在各个坐标系的转换运算。
35.区别于现有技术,本技术的标定系统中的标定杆结构简单,而且利用该标定杆对机器人的重力加速度方向进行标定的操作方法简单,可以在短时间内完成重力加速度方向的标定,且成本较低,有利于节省工业成本。
36.参阅图4,图4是本技术机器人的重力加速度方向的标定方法一实施方式的流程示意图。上述任一实施方式的标定杆适用于本实施方式的标定方法。上述任一实施方式的标定杆主要应用于机器人本体的安装平面不水平的情况,即安装平面与地面存在角度差,例如,壁装或者倒装。
37.步骤40:当标定杆的连接杆垂直于水平仪,同时连接杆垂直于安装面,并通过水平仪检测到连接杆与水平面垂直时,获取机器人的每一个连接轴相对于各自坐标系的轴角
度;其中,标定杆为本技术任一实施例的标定杆;通过其安装面与机器人的末端法兰固定连接。
38.在实际应用中,将标定杆安装于机器人的末端法兰,在其中一个实施方式中,通过螺栓将安装面上的螺丝孔与机器人的末端法兰螺纹连接。然后,调整机器人的连接轴的位置以调整末端法兰的姿态。机器人包括多个连接轴,且连接轴依次轴接/枢接,由于机器人末端法兰的朝向主要与机器人的最后三个轴有关,因此,为了便于调整机器人的末端法兰的姿态,可以调整临近末端法兰的两个连接轴的位置,以调整机器人末端法兰的姿态,使得机器人的末端法兰的方向朝下,当通过水平仪检测到连接杆与水平面垂直时,此时机器人的末端法兰所朝向的方向即为重力加速度的方向。
39.进一步地,与机器人耦接的控制器获取机器人的每一个连接轴相对于各自坐标系的轴角度。其中,连接轴对应的轴角度有一个初始值,通过编码器获取每个连接轴相对于初始角度的角度信息。具体的,检测到标定杆的水平仪内部标定物到达预定位置时,通过设置于每一个连接轴上的编码器获取每一个连接轴相对于各自坐标系的轴角度。
40.步骤41:依据每一个连接轴相对于各自坐标系的轴角度确定机器人的末端法兰坐标系与机器人的基础坐标系之间的变换矩阵。
41.在本实施方式中,机器人的每个连接轴有各自独立的轴坐标系,与机器人耦接的控制器获取到每一个连接轴相对于各自坐标系的轴角度后,依据每一个连接轴相对于各自坐标系的轴角度确定机器人的末端法兰坐标系到机器人的基础坐标系的变换矩阵。
42.在其中的一个实施方式中,依据dh正运动学算法以及每一个连接轴相对于各自坐标系的轴角度确定机器人的末端法兰坐标系到机器人的基础坐标系的变换矩阵。
43.dh正运动学算法的思想为:在机械臂各关节(各连接轴)处建立直角坐标系,然后确定每相邻坐标系间的变换矩阵,然后将得到的矩阵依次乘最终得到法兰坐标系到基础坐标系的矩阵。依据如下公式一即可获得机器人的末端法兰坐标系到机器人的基础坐标系的变换矩阵。
[0044][0045]
其中,n为机器人的连接轴数,
n-1
t
n
为第n个连接轴到第n-1个连接轴的变换矩阵,为机器人的末端法兰坐标系的x轴到机器人的基础坐标系的向量表达,为机器人的末端法兰坐标系的y轴到机器人的基础坐标系的向量表达,为机器人的末端法兰坐
标系的z轴到机器人的基础坐标系的向量表达,为机器人的末端法兰坐标系的原点到机器人的基础坐标系的向量表达。
[0046]
步骤42:基于变换矩阵获取机器人重力加速度方向在机器人的基础坐标系下的向量;其中,机器人的重力加速度方向在机器人的基础坐标系下的向量为末端法兰坐标系的z轴方向在基础坐标系的向量。
[0047]
在本实施方式中,与机器人耦接的控制器基于变换矩阵获取机器人重力加速度方向在机器人的基础坐标系下的向量;其中,机器人的重力加速度方向在机器人的基础坐标系下的向量为末端法兰坐标系的z轴方向在基础坐标系的向量。
[0048]
即,为机器人的重力加速度方向到机器人的基础坐标系的向量表达。
[0049]
进一步地,控制器存储机器人重力加速度方向在机器人的基础坐标系下的向量,以用于计算每一个连接轴的电机输出力矩。在机器人的拖动示教应用场景中,需要应用动力学算法计算平衡机器人本体及负载的重力矩所需要的各轴电机的输出力矩,拖动示教的实现方案包括零力控制和阻抗控制。前述两种方法均需要机器人逆动力学模型以实现重力矩/摩擦力矩补偿。机器人逆动力学模型(未将外部作用力列入)的一般形式如下公式二:
[0050][0051]
其中,q为轴角度,为轴速度,轴加速度,τ为电机输出力矩,g(q)为重力矩,为摩擦力矩,为惯性力项,为离心力与科氏力项。其中,g(q)项中包含重力加速度方向在机器人基础坐标系中的向量表达。本实施方式的标定方法适用于任意安装方式,在任意安装方式下都能够准确的得到机器人的重力加速度方向在机器人基础坐标系中的向量表达,从而使得拖动示教有效。而不用依赖于高成本的传感器获知机器人的安装姿态角,然后通过安装姿态角来间接计算重力加速度方向在机器人基础坐标系中的向量表达,可以有效节省成本。
[0052]
在确立了机器人的重力加速度方向在机器人基础坐标系中的向量之后,将标定杆从机器人的末端法兰处取下来,再将机器人的机械手臂安装于机器人的末端法兰处,执行拖动示教,并依据前述的逆动力学模型确定每个连接轴的电机输出力矩,进而控制机械手臂的姿态,以完成相应的操作。
[0053]
上述任一实施方式的机器人的连接轴的数目不做具体限定,可以是六轴机器人,机器人包括六个连接轴;也可以为四轴机器人。
[0054]
区别于现有技术,本实施例利用该标定杆对重力加速度方向进行标定,操作方法简单,可以在短时间内完成重力加速度方向的标定,且成本较低,有利于节省工业成本。
[0055]
以上所述仅为本技术的实施方式,并非因此限制本技术的专利保护范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

