1.本实用新型涉及写字机器人技术领域,尤其是涉及一种全向式写字机器人。
背景技术:
2.公知的,写字机器人是一种教学、科普设备;在教学方面,可为大学机械、电子、计算机、软件等专业开设写字机器人写字实验、绘图实验、结构学实验、装配实验、计算机应用实验、机器人绘图软件编制实验、数控编程实验等,在科普方面,可以为中小学生进行写字、绘画表演,来提高中小生的视野和兴趣;
3.目前,最常用的写字机器人为四自由度关节机器人,该机器人的握笔端只能够进行升降和平移的动作,虽然能够进行基本的书写,但是只能够写出较为方正的字体,而且书写的范围较小,写完一个字需要停顿,然后再进行下一个字的书写,书写效率较慢;因此,综上所述,目前市场上需要一种能够写出多种字体,且书写效率高的写字机器人。
技术实现要素:
4.为了克服背景技术中的不足,本实用新型公开了一种全向式写字机器人。
5.为实现上述发明目的,本实用新型采用如下技术方案:
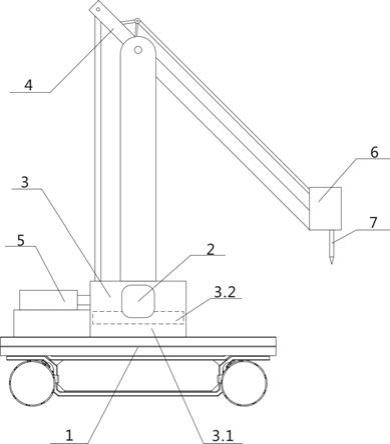
6.一种全向式写字机器人,包含麦克纳姆轮底盘、旋转电机、平行四连杆式机械臂、驱动电机和写字笔;所述麦克纳姆轮底盘的顶部面设有旋转电机以及锥齿轮机构,锥齿轮机构与旋转电机的驱动端齿轮对应配合,锥齿轮机构中的锥齿轮与机械臂的尾端对应固定连接,且机械臂的尾端设有用于驱动机械臂动作的驱动电机,机械臂的头端通过装夹机构与写字笔对应连接;
7.优选的,所述锥齿轮机构由轴承座和锥齿轮对应配合构成,轴承座对应安装于麦克纳姆轮底盘的顶部面;
8.优选的,所述装夹机构包含外壳、固定轴、夹持杆和开合气缸,外壳对应安装于机械臂的头端,且外壳的底部面设有用于写字笔通过的开口,固定轴垂直安装于外壳的内顶面,固定轴的轴身转动设有两对称的夹持杆,两夹持杆分别与一开合气缸的伸缩端对应铰接,开合气缸的固定端安装于外壳的对应内侧面;
9.优选的,所述夹持杆的夹持端设有弹性胶垫;
10.优选的,所述外壳的内顶面设有用于限制写字笔位置的定位块。
11.由于采用如上所述的技术方案,本实用新型具有如下有益效果:
12.本实用新型公开的一种全向式写字机器人,通过麦克纳姆轮底盘能够使机器人整体实现360
°
的自由运动,从而使得本机器人写字的连贯性更强,进而提高本机器人的写字效率,通过旋转电机驱动机械臂转动,能够增加写出字体的多样性,通过驱动电机能够带动机械臂进行升降和开合的动作,从而让写字笔的写字范围更大;此外,通过装夹机构不仅能够固定夹紧写字笔,而且还能够适配不同粗细的写字笔。
附图说明
13.图1为本实用新型的结构示意图;
14.图2为装夹机构的结构示意图。
15.图中:1、麦克纳姆轮底盘;2、旋转电机;3、锥齿轮机构;3.1、轴承座;3.2、锥齿轮;4、机械臂;5、驱动电机;6、装夹机构;6.1、外壳;6.2、固定轴;6.3、夹持杆;6.4、开合气缸;6.5、弹性胶垫;7、写字笔。
具体实施方式
16.通过下面的实施例可以详细的解释本实用新型,公开本实用新型的目的旨在保护本实用新型范围内的一切技术改进。
17.结合附图1
‑
2所述的一种全向式写字机器人,包含麦克纳姆轮底盘1、旋转电机2、平行四连杆式机械臂4、驱动电机5和写字笔7;通过麦克纳姆轮底盘1能够使机器人整体实现360
°
的自由运动,从而使得本机器人写字的连贯性更强,进而提高本机器人的写字效率,所述麦克纳姆轮底盘1的顶部面设有旋转电机2以及锥齿轮机构3,通过旋转电机2驱动机械臂4转动,能够增加写出字体的多样性,锥齿轮机构3与旋转电机2的驱动端齿轮对应配合,根据需要,所述锥齿轮机构3由轴承座3.1和锥齿轮3.2对应配合构成,轴承座3.1对应安装于麦克纳姆轮底盘1的顶部面,该轴承座3.1既对锥齿轮3.2起到了保护作用,又保证了锥齿轮3.2的驱动能力;锥齿轮机构3中的锥齿轮3.2与机械臂4的尾端对应固定连接,通过旋转电机2的齿轮带动锥齿轮3.2转动,然后锥齿轮3.2带动机械臂4转动,且机械臂4的尾端设有用于驱动机械臂4动作的驱动电机5,通过驱动电机5能够带动机械臂4进行升降和开合的动作,从而让写字笔7的写字范围更大,机械臂4的头端通过装夹机构6与写字笔7对应连接,从而通过各部件的配合动作来驱动写字笔7的移动,进而实现写字创作;
18.此外,所述装夹机构6包含外壳6.1、固定轴6.2、夹持杆6.3和开合气缸6.4,外壳6.1对应安装于机械臂4的头端,且外壳6.1的底部面设有用于写字笔7通过的开口,固定轴6.2垂直安装于外壳6.1的内顶面,固定轴6.2的轴身转动设有两对称的夹持杆6.3,且夹持杆6.3的夹持端与写字笔7的外壁对应配合,两夹持杆6.3分别与一开合气缸6.4的伸缩端对应铰接,通过两开合气缸6.4的同步动作,实现夹持杆6.3的开合动作,继而完成对写字笔7的夹持和放松,开合气缸6.4的固定端安装于外壳6.1的对应内侧面,特别的,所述夹持杆6.3的夹持端设有弹性胶垫6.5,该弹性胶垫6.5能够适配不同直径的写字笔7,根据需要,所述外壳6.1的内顶面设有用于限制写字笔7位置的定位块,从而保证同样长度的写字笔7尾端位于同一水平面,减少后续操作的难度,另外,本装夹机构6还能够安装搬运夹具、钻孔器、切割刀、焊接枪等设备,从而让本机器人能够完成其他的工业操作。
19.本实用新型未详述部分为现有技术。
技术特征:
1.一种全向式写字机器人,其特征是:包含麦克纳姆轮底盘(1)、旋转电机(2)、平行四连杆式机械臂(4)、驱动电机(5)和写字笔(7);所述麦克纳姆轮底盘(1)的顶部面设有旋转电机(2)以及锥齿轮机构(3),锥齿轮机构(3)与旋转电机(2)的驱动端齿轮对应配合,锥齿轮机构(3)中的锥齿轮(3.2)与机械臂(4)的尾端对应固定连接,且机械臂(4)的尾端设有用于驱动机械臂(4)动作的驱动电机(5),机械臂(4)的头端通过装夹机构(6)与写字笔(7)对应连接。2.如权利要求1所述的全向式写字机器人,其特征是:所述锥齿轮机构(3)由轴承座(3.1)和锥齿轮(3.2)对应配合构成,轴承座(3.1)对应安装于麦克纳姆轮底盘(1)的顶部面。3.如权利要求1所述的全向式写字机器人,其特征是:所述装夹机构(6)包含外壳(6.1)、固定轴(6.2)、夹持杆(6.3)和开合气缸(6.4),外壳(6.1)对应安装于机械臂(4)的头端,且外壳(6.1)的底部面设有用于写字笔(7)通过的开口,固定轴(6.2)垂直安装于外壳(6.1)的内顶面,固定轴(6.2)的轴身转动设有两对称的夹持杆(6.3),两夹持杆(6.3)分别与一开合气缸(6.4)的伸缩端对应铰接,开合气缸(6.4)的固定端安装于外壳(6.1)的对应内侧面。4.如权利要求3所述的全向式写字机器人,其特征是:所述夹持杆(6.3)的夹持端设有弹性胶垫(6.5)。5.如权利要求3所述的全向式写字机器人,其特征是:所述外壳(6.1)的内顶面设有用于限制写字笔(7)位置的定位块。
技术总结
一种全向式写字机器人,包含麦克那姆轮底盘、旋转电机、平行四连杆式机械臂、驱动电机进和写字笔;所述麦克纳姆轮底盘的顶部面设有旋转电机,以及与旋转电机对的驱动端齿轮对应配合的锥齿轮机构,锥齿轮机构中的锥齿轮与机械臂的尾端对应固定连接,且机械臂的尾端设有用于驱动机械臂动作的驱动电机,机械臂的头端通过装夹机构与写字笔对应连接;且本机器人能够写出多种字体,且书写效率高。且书写效率高。且书写效率高。
技术研发人员:向华安 王浩 焦郑瑞 王荣昌
受保护的技术使用者:洛阳安怀达智能科技有限公司
技术研发日:2020.12.30
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

