1.本发明涉及道路扫地机器人技术领域,尤其涉及一种倒垃圾结构及智能扫地机器人。
背景技术:
2.随着社会的发展,扫地机器人成为越来越普及的清洁工具,因此扫地机器人被广泛引用于人民生活的各领域中,目前大部分扫地机器人不具有电动的倒垃圾结构,只能手动倒垃圾。大型的清扫车具有倒垃圾系统,然而现有清扫车在倾倒垃圾时,需要对整个垃圾桶进行翻转,结构复杂;同时需要人为进行控制较为麻烦;且在某些情况下还会出现垃圾掉落的情况。
技术实现要素:
3.为此,需要提供一种倒垃圾结构,结构简单,同时提高倒垃圾扫地机器人倒垃圾效率。
4.为实现上述目的,本技术提供了一种倒垃圾结构,包括:车体、举升机构、连杆和垃圾箱;
5.所述车体两侧各设置有连杆,所述连杆一端与所述车体可转动连接,所述连杆的另一端与所述垃圾箱可转动连接;所述举升机构一端与所述车体连接,所述举升机构另一端与所述连杆或者垃圾箱连接,所述举升机构用于将所述垃圾箱从所述车体内移出;
6.所述垃圾箱上设置有垃圾箱门,所述垃圾箱门置于所述垃圾箱底部;所述垃圾箱门上还设置推杆,所述推杆一端与所述垃圾箱连接,所述推杆另一端与所述垃圾箱门连接,所述推杆用于控制所述垃圾箱门开合。
7.进一步地,还包括:挂钩和挂杆;所述挂杆置于所述垃圾箱门上,所述挂钩与所述连杆固定连接,且所述挂钩置于所述连杆靠近所述垃圾箱的一端;
8.其中,当所述连杆举升抬起所述垃圾箱,且所述垃圾箱到达第一预设位置时,所述挂钩从所述挂杆上脱出;当所述连杆收回所述垃圾箱,且所述垃圾箱到达第二预设位置时,所述挂钩勾住所述挂杆。
9.进一步地,所述挂钩包括连接件和挂钩本体;所述连接件一端与所述连杆连接,另一端与所述挂钩本体连接,且所述挂钩本体为弧形。
10.进一步地,还包括:站立脚踏板;所述站立脚踏板可转动的设置在所述垃圾箱上。
11.进一步地,车体单侧的所述连杆为两根,且两根所述连杆相互平行,车体单侧的两个连杆上的四个转动连接处为平行四边形。
12.进一步地,所述举升机构为电机推杆、液压杆或者气动杆。
13.进一步地,所述垃圾箱门上设置有合页,所述垃圾箱门通过合页与所述垃圾箱连接;所述推杆置沿竖直方向设置,且所述推杆置于所述垃圾箱的一侧。
14.进一步地,还包括传感器,所述传感器置于所述车体外壁上,所述传感器用于感应
垃圾桶所处位置。
15.进一步地,还包括:控制单元,所述控制单元与所述传感器、推杆以及举升机构电连接。
16.本发明提供一种智能扫地机器人,包括本发明实施例的任意一项所述的一种倒垃圾结构,所述智能扫地机器人的车体上还设置有边刷和主刷;所述边刷置于所述车体前端,所述主刷置于所述车体中部,所述边刷用于将垃圾清扫至所述车体中部区域,所述主刷用于将垃圾移至所述智能扫地机器人的垃圾箱中。
17.区别于现有技术,上述技术方案通过举升机构、连杆、垃圾箱以及垃圾箱门的设置,使垃圾从所述垃圾箱的下方倒出,结构简单;同时避免了垃圾箱翻转时,垃圾掉落以及垃圾残留在所述垃圾箱内的情况发生,同时提高到垃圾的效率。
附图说明
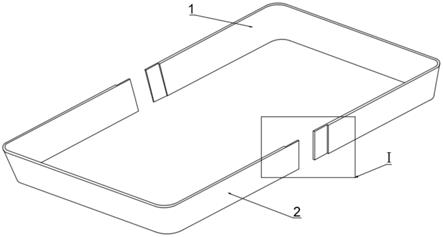
18.图1为所述一种倒垃圾结构结构图;
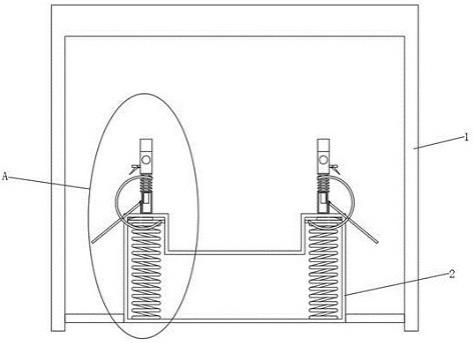
19.图2为所述举升机构、连杆和垃圾箱结构图;
20.图3为图2中a处放大图;
21.图4为图2中b处放大图;
22.图5为当所述垃圾箱处于第一预设位置和第二预设位置时结构图。
23.附图标记说明:
24.1、车体;2、举升机构;3、连杆;4、垃圾箱;5、挂钩;6、挂杆;7、站立脚踏板;8、合页;9、垃圾桶;
25.11、边刷;12、主刷;
26.41、垃圾箱门;42、推杆;
27.51、连接件;52、挂钩本体。
具体实施方式
28.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
29.请参阅图1至图5,本技术公开了一种倒垃圾结构,包括:车体1、举升机构2、连杆3和垃圾箱4,垃圾箱4顶部开口用于倒入清扫的垃圾;所述车体两侧各设置有连杆,所述连杆3一端与所述车体1可转动连接,所述连杆3的另一端与所述垃圾箱4可转动连接;所述举升机构2一端与所述车体1连接,所述举升机构2另一端与所述连杆3或者垃圾箱4连接,所述举升机构2用于将所述垃圾箱4从所述车体1内移出,优选地为移出时所述垃圾箱的水平角度保持不变,即垃圾箱底面与车体底面之间的角度不变;所述垃圾箱4上设置有垃圾箱门41,所述垃圾箱门41置于所述垃圾箱4底部,当垃圾箱门41开启时,所述垃圾箱4内的垃圾从所述垃圾箱4底部排出;所述垃圾箱门41上还设置推杆42,所述推杆42一端与所述垃圾箱4连接,所述推杆42另一端与所述垃圾箱门41连接,所述推杆42用于控制所述垃圾箱门41开合。所述垃圾箱4置于所述车体1内,在举升机构2以及连杆3的带动下移至垃圾桶9上方。
30.需要说明的是,所述举升机构2为液压伸缩杆,且所述举升机构2一端与所述垃圾箱4铰接,所述举升机构2的另一端与车体1铰接;具体的,所述举升机构2可旋转的设置于所
述连杆3以及垃圾箱4上,便于所述举升机构2举升所述垃圾箱4。需要说明的是,所述垃圾箱4绕所述连杆3与所述车体1的连接处旋转,以此实现所述垃圾箱4的举升作业;即,所述垃圾箱4以所述连杆3与所述车体1的连接处为圆心,以所述连杆3为半径画出虚拟弧线,当所述垃圾箱4从弧线一端移至另一端时,所述垃圾箱4完成举升或者收回作业。
31.需要说明的是,当所述垃圾箱4完成举升作业时,所述垃圾箱4置于垃圾桶9上方,开启所述垃圾箱门41口,垃圾在重力作用下向下落入所述垃圾箱4下方的垃圾桶9中。
32.还需要说明的是,所述垃圾箱门41置于所述垃圾箱4底部,垃圾入口置于所述垃圾箱4顶部(即,垃圾从所述垃圾箱4顶部进入所述垃圾箱4),所述垃圾箱门41与垃圾入口相对设置。所述垃圾箱门41可转动设置在所述垃圾箱4底部,且所述推杆42用于控制所述垃圾箱门41的开合,当垃圾箱门41开启时,所述垃圾箱4内的垃圾从所述垃圾箱4底部排出;具体的,所述推杆42一端与所述垃圾箱门41铰接,另一端与所述垃圾箱4铰接。在另一实施例中,所述推杆42为推杆42电机。当然,所述垃圾箱4与所述垃圾箱门41时间还可以设置有密封条,密封条用于防止液体或者细小的粉尘从所述垃圾箱4与垃圾箱门41之间的间隙内掉出。
33.在实际作业中,当所述垃圾箱4内盛满垃圾时,所述车体1将移动至垃圾桶9附近;此时,所述举升机构2将推动所述垃圾箱4或者所述连杆3,使所述垃圾箱4从所述车体1内移动至垃圾桶9上方;随后在所述推杆42的驱动下所述垃圾箱门41开启,垃圾从所述垃圾箱4内落至下方的垃圾桶9内;最后所述推杆42驱动所述垃圾箱门41关闭,且所述举升机构2带动所述垃圾箱4收回至所述车体1内。
34.上述技术方案通过举升机构2、连杆3、垃圾箱4以及垃圾箱门41的设置,使垃圾从所述垃圾箱4的下方倒出,结构简单;同时避免了垃圾箱4翻转时,垃圾掉落以及垃圾残留在所述垃圾箱4内的情况发生,同时提高到垃圾的效率。
35.在所述举升机构的驱动下,所述垃圾箱将进行举升或者收回作业;即,举升是指垃圾箱从所述车体内移至车体1外,收回是指,垃圾箱从所述车体1外移至车体内。
36.请参与图2,在某些实施例中,还包括:挂钩5和挂杆6;所述挂杆6置于所述垃圾箱门41上,所述挂钩5与所述连杆3固定连接,且所述挂钩5置于所述连杆3靠近所述垃圾箱4的一端;其中,当所述连杆3举升抬起所述垃圾箱4,且所述垃圾箱4到达第一预设位置时,所述挂钩5从所述挂杆6上脱出;当所述连杆3收回所述垃圾箱4,且所述垃圾箱4到达第二预设位置时,所述挂钩5勾住所述挂杆6。
37.需要说明的是,所述挂杆6置于所述垃圾箱门41的侧壁上,所述挂钩5与所述挂杆6相互适配,即,在第二预设位置时,所述挂钩5可勾住所述挂杆6。还需要说明的是,所述第一预设位置为所述举升机构2完成举升所述垃圾箱4作业后,所述垃圾箱4所处的位置,所述第二预设位置为所述举升机构2完成收回所述垃圾箱4作业后,所述垃圾箱4所处的位置。具体的,所述第一预设位置于所述车体外,且当所述垃圾箱4处于第一预设位置时,垃圾桶9置于所述垃圾箱4下方;所述第二预设位置置于所述车体内(图5中实线处的所述垃圾箱),且当所述垃圾箱4处于第二预设位置时,所述垃圾箱4用于装载垃圾。
38.需要进一步说明的是,当所述垃圾箱4置于第一预设位置(图5中虚线处的所述垃圾箱)时,所述挂钩5完全从所述挂杆6上脱出,随后在所述推杆42的作用下所述垃圾箱门41可以开启;当所述垃圾箱4置于第二预设位置时,所述挂钩5与所述挂杆6锁合,此时所述推杆42将不再施力,所述垃圾箱门41在所述挂钩5与挂杆6的作用下不会开启。在本实施例中,
所述挂钩5仅为一个与挂杆6适配的钩子,即,当所述挂钩5从所述挂杆6上脱出后(当所述垃圾箱4从第二预设移出时,所述挂钩5便与挂杆6分离),锁合功能随即失效;此时所述推杆42将保证所述垃圾箱门41不会开启;所述垃圾箱4从所述第二预设位置移出后,所述挂钩5便与挂杆6分离。具体的,当所述举升机构2举升或者收回所述垃圾箱4时,所述挂钩5通所述连杆3一同绕连杆3与垃圾箱4的连接处转动,当处于第二预设位置时,所述挂钩5正好与挂杆6锁合;同理,当垃圾箱4被举升时,挂钩5从挂杆6上脱出。
39.请参与图3,在某些实施例中,所述挂钩5包括连接件51和挂钩本体52;所述连接件51一端与所述连杆3连接,另一端与所述挂钩本体52连接,且所述挂钩本体52为弧形。需要说明的是,所述连接件51与所述连杆3固定连接,并连成一条直线;所述挂钩本体52一端与所述连接件51连接。连接件51和挂钩本体52所形成的挂钩开口可以指向所述车体,举升放下时,挂钩开口可以靠近挂杆6或者远离挂杆6并脱出,实现挂杆6的锁合和脱出。
40.需要进一步说明的是,当所述垃圾箱4从第二预设位置移出后,所述挂杆6始终与弧形挂钩本体52接触,使所述垃圾箱门41始终处于闭合状态,直至所述垃圾箱4运动至第一预设位置,所述挂钩5才从所述挂杆6上脱出。具体的,当所述垃圾箱4从所述第二预设位置向第一预设位置运动的过程中,所述挂钩5始终挂于挂杆6上,当所述垃圾箱4达到第二预设位置时,所述挂钩5才从挂杆6上脱出;此时,所述垃圾箱门41开启。同理,当垃圾倒完后,在所述推杆42的作用下,所述垃圾箱门41关闭;当所述垃圾箱4从所述第一位置收回时,所述挂钩5便于挂杆6锁合,直至所述垃圾箱4到达第二预设位置;当所述垃圾箱4到达第二预设位置时候,所述挂杆6置于所述挂钩本体52与所述连接杆的连接处。
41.当然,在另一些实施例中,所述挂钩本体52远离所述连接件51的一侧设置有倒角,便于所述挂杆6与所述挂钩5锁合;即,当所述垃圾箱门41与垃圾箱4关闭后,此时,所述垃圾箱门41与垃圾箱4之间可能会存在间隙,此时当所述挂钩本体52的倒角与挂杆6触碰时,可以通过倒角将所述挂杆6以及垃圾箱门41向上抬起,使所述垃圾箱门41与垃圾箱4之间的间隙消除。
42.请参与图1和图2,在某些实施例中,还包括:站立脚踏板7;所述站立脚踏板7可转动的设置在所述垃圾箱4上。当所述垃圾箱4置于所述车体1内时,操作员可以手动打开所述站立脚踏板7,操作员可站在所述站立脚踏板7上。所述站立脚踏板7与所述垃圾箱4铰接。
43.请参与图1和图2,为了提高举升和收回时所述垃圾箱4的稳定性,在某些实施例中,所述连杆3为两根,且两根所述连杆3相互平行且等长,这样连杆上的四个活动连接处形成一个平行四边形,使得垃圾箱在移出抬起时的水平角度不变。所述举升机构2与所述连杆3连接。需要说明的是,所述举升机构2与任意一根所述连杆3连接,与所述连杆3连接可以降低所述举升机构2的长度。
44.请参与图4,在某些实施例中,所述垃圾箱门41上设置有合页8,所述垃圾箱门41通过合页8与所述垃圾箱4连接;所述推杆42置沿竖直方向设置,且所述推杆42置于所述垃圾箱4的一侧。需要说明的是,所述垃圾箱门41分为垃圾区域、旋转区域以及推杆42区域,旋转区域置于垃圾区域与推杆42区域中间,合页8置于旋转区域上,推杆42推动推杆42区域,垃圾区域与所述垃圾箱4的底部开口适配。即,在本实施例中,所述推杆42向下施力,垃圾区域向上转动,关闭所述垃圾箱4;所述推杆42向上拉动推杆42区域,垃圾区域向下转动,开启所述垃圾箱4。
45.在本实施例中,还包括传感器,所述传感器置于所述车体1外壁上,所述传感器用于感应垃圾桶9所处位置。还需要进一步说明的是,所述垃圾箱4内同样设置传感器,当垃圾到达一定重量或者高度时,可以通知操作人员或者向控制机构发出垃圾满了的信号。
46.在本实施例中,还包括:控制单元,所述控制单元与所述传感器、推杆42以及举升机构2电连接。通过传感器感知垃圾桶9位置,同时通过推杆42以及举升机构2驱动垃圾箱4。
47.上述实施例的倒垃圾结构可以用于清扫车体上,如智能扫地机器人。则本发明还提供一种智能扫地机器人,包括上述任意一项实施例的倒垃圾结构。所述车体1上还设置有边刷11和主刷12;所述边刷11置于所述车体1前端,所述主刷12置于所述车体1中部,所述边刷11用于将垃圾清扫至所述车体1中部区域,所述主刷12用于将垃圾移至所述垃圾箱4中。需要说明的是所述垃圾箱4的进垃圾口置于所述垃圾箱顶部。
48.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。