本发明涉及一种例如为旋转塔式起重机的起重机,其具有起重机吊臂和负载钩定位装置,连接到负载钩的吊索从该起重机吊臂上引出,并且该负载钩定位装置用于确定负载钩位置。本发明还涉及用于控制这种起重机的方法和装置,其中,通过负载钩定位装置来感测连接到吊索的负载钩的负载钩位置。
背景技术
旋转塔式起重机可以包括至少近似水平的、也可能可俯仰的起重机吊臂,起重机吊臂由竖直延伸的塔架支撑并可围绕竖直的塔架纵向轴线旋转。在所谓的上旋转式起重机的情况下,吊臂相对于塔架旋转,而在下旋转式起重机的情况下,整个塔架以及因此与其铰接的吊臂都旋转。负载钩与塔架轴线的距离可通过可沿吊臂移动的吊运车调节,其中,连接到负载钩的吊索在所述吊运车上运行,或通过俯仰吊臂的俯仰来调节。
出于各种原因,在此期望的是,通过相应的负载钩定位装置尽可能精确地确定负载钩的准确位置。这不仅在起重机操作员例如在墙后不再能看到负载钩时是有利的,而且在在吊运车位置不再与负载钩位置完全一致(即,在垂直方向上不再叠合)时也是有利的(应理解,由于负载钩的下降深度,负载钩和吊运车的高度位置不同)。负载钩位置与吊运车位置的这种偏差可能有多种原因:例如,由于风力或吊索的谐波或动态偏转(例如,负载物的钟摆运动或风偏转)而导致的不直的路线。在此,根据要完成的任务,例如为了抑制钟摆运动,确定负载钩相对于吊运车或相对于起重机的位置可能就足够了,或者例如为了实现装卸过程中的自动化操作,也可能需要空间中的绝对负载钩位置。除了将负载钩位置信号用于这种控制目的之外,由于可以永久监测负载,还可以通过确定负载钩位置来实现安全性提高,其中,如有必要,还可以实现下降深度传感器的冗余。
例如,在文献DE 20 2008 018 260 U1或DE 10 2009 032 270 A1或文献EP 16 28 902 B1、DE 10 324 692 A1、EP 25 62 125 B1、US 2013 01 61 279 A或US 55 26 946 B中已知了起重机的这种与负载钩位置确定一起工作的诸如摆动阻尼等辅助系统。
此外,利勃海尔公司还已知了一种名为“Cycoptronic”的用于海上起重机的摆动阻尼系统,其预先计算了负载运动和诸如风等影响,并在此基础上开始补偿运动,其中,通过陀螺仪检测缆索相对于垂直方向的角度及其变化,以便根据陀螺仪信号干预控制。
在此,原则上,能够以各种方式监测负载钩位置,其中,例如文献WO 91/146 44 A1示出了这种负载钩位置确定。
在此,用光学方法检测负载钩位置在现有技术中是已知的。例如,JP 9-142773示出了一种起重机,在其吊臂尖端上安装有向下看的相机,吊索从该吊臂尖端下降,将该相机的视角方向调节为跟随负载钩的钟摆运动,使得起重机操作员能够通过相机始终看到负载钩。DE 197 25 315 C2说明了一种带有可相对于支撑架移动的吊运车机构的冶炼厂起重机,吊索从该吊运车下降。支撑架上布置有多个相机,它们的视野范围足够大,以便能够在不同吊运车机构位置的情况下检测起重机吊钩。在这种冶炼厂起重机中,要接近的位置相对固定地预先设定,因此待处理的图像数据量仍是可控的。然而,如果这种系统用于旋转塔式起重机,将会产生大量难以处理的数据流。
文献WO 2005/082770 A1还公开了一种旋转塔式起重机,在其吊运车上安装有向下看的相机,以便向起重机操作员显示负载钩周围环境的视频图像,使得起重机操作员能够更好地识别移动方向上的障碍物。该摄像系统用于可视化障碍物或起重机操作员必须控制的下降或取物区域,但在此它不能确定负载钩相对于起重机的位置或空间中的绝对位置。
然而,对于这种摄像系统,难以足够快且足够可靠地确定负载钩位置,因为图像评估系统通常必须处理大量数据,并在计算机能力有限的情况下为此需要一定时间。此外,在较大下降深度的情况下,从起重机吊臂只能看到非常小的负载钩,因此文献EP 29 31 649 B1已经提出了为观察相机提供自动变焦。但是,以此方式无法解决影响能见度的诸如雾或烟等环境影响。
文献DE 10 2006 001279 A提出了将发射和接收装置安装在旋转塔式起重机的吊运车上,该发射和接收装置与负载钩和吊臂上的无线电模块交换信号,其中,可以根据信号的传播时间来确定吊运车与塔架的距离,并因此确定外展以及负载钩的下降深度。还为了确定负载钩相对于吊运车的侧向偏移,将使用倾斜传感器来测量吊索的偏转角,该偏转角与下降深度一起校正负载的悬垂或确定负载钩相对于吊运车的偏移。
技术实现要素:
因此,本发明的目的是提供一种改进的起重机以及一种改进的用于控制起重机的方法和装置,其避免了现有技术的缺点并以有利的方式进一步发展了现有技术。特别地,应尽可能实时实现对负载钩位置的可靠且精确的确定,并尽可能不受诸如雾和烟等恶劣环境条件的影响。
根据本发明,所述目的通过根据权利要求1所述的起重机、根据权利要求17所述的用于控制起重机的装置和根据权利要求20所述的装置来实现。本发明的优选实施例是从属权利要求的主题。
因此,提出了在起重机的特定位置上安装彼此通信的电磁无线电模块,它们根据交换的无线电信号确定无线电模块相对彼此的位置,并由此确定负载钩位置。根据本发明,负载钩定位装置具有至少三个相互交换无线电信号的电磁无线电模块,其中至少一个无线电模块附接在负载钩上,并且至少两个其他无线电模块彼此间隔开地附接在起重机结构上,该负载钩定位装置还具有用于评估无线电信号并且根据无线电信号确定负载钩位置的评估装置。在此,负载钩上的无线电模块与至少两个其他无线电模块中的每者交换信号,其中,评估装置可以根据负载钩上的无线电模块与至少两个其他无线电模块之间的无线电信号确定负载钩的位置。这种电磁无线电信号不受烟雾的影响,而且可以快速评估以实现实时的位置确定。
在此,原则上,无线电模块可以附接在起重机结构的不同位置上,其中,视野相关布置(sichtverbundene Anordnung)简化了无线电信号的评估或无线电模块相对彼此的位置的确定。如果起重机安装有可沿起重机吊臂移动的吊运车且吊索从该吊运车引出,则在本发明的有利改进示例中,至少一个无线电模块可以附接在所述吊运车上,以便根据负载钩上的无线电模块和吊运车上的无线电模块之间交换的无线电信号确定负载钩相对于吊运车的位置。
在此,有利地,多个无线电模块可以分布在所述吊运车上或彼此间隔开地布置在吊运车上,这明显有助于根据交换的无线电信号确定负载钩的位置。特别地,至少三个无线电模块可彼此间隔开地布置在吊运车上,其中,至少三个无线电模块有利地不沿直线布置,而是布置在三角形的角部处。特别地,吊运车上的无线电模块可以不仅在吊臂的纵向方向上而且还在相对于该吊臂的纵向方向的横向上彼此偏移地布置,其中,无线电模块可布置在共同的平面中,特别是在大致水平的平面中,或还可布置在多个不同地定位的平面中。当负载钩例如通过横向于吊臂纵向方向或平行于此的摆钟运动而移出吊运车的完全垂直下方的位置时,由于在吊臂纵向方向以及相对于纵向方向的横向上的分布,可以根据负载钩和吊运车上的无线电模块之间的无线电信号相对容易地确定负载钩位置。在对起重机的旋转运动或吊运车的行驶运动进行制动时,以及在存在诸如风等外部影响时,可能发生这种横向偏转。
如有需要,也可以将三个以上的无线电模块布置在吊运车上,例如布置在可在水平面中延伸的矩形的角部处。
在本发明的有利改进示例中,至少一个无线电模块也可以固定地安装在吊臂上,例如固定在端部上或正好起重机吊臂的中间。有利地,也可以将多个无线电模块固定地附接在起重机吊臂上,特别是在吊臂的相对端部上分别安装一个无线电模块,其中,所述端部一方面可以是悬臂式的吊臂尖端,一方面可以是吊臂的铰接件,通过该铰接件,吊臂能够以俯仰的方式铰接在塔架上或伸缩臂起重机的上部结构上。通过起重机吊臂端部处的以及可选的起重机吊臂中间部分处的无线电模块,可以根据吊运车-无线电模块和吊臂-无线电模块之间交换的无线电信号以简单的方式来确定吊运车的位置,且/或可以根据吊臂-无线电模块和吊运车-无线电模块之间交换的无线电信号以简单的方式来确定负载钩相对于吊臂的纵向轴线的位置并且因此还确定相对于吊运车的钟摆偏移。
在本发明的改进示例中,作为所述无线电模块的替代或补充,也可以将一个或多个其他无线电模块附接到起重机结构的其他位置,例如在旋转塔式起重机的塔架上或在施工现场的与起重机间隔开的另一位置上或另一起重机上。
通过在负载钩上的无线电模块与起重机结构上每个或至少一些所述其他无线电模块之间交换无线电信号,特别是即使当吊索与负载钩一起摆动或由于风而偏转,或吊臂和/或塔架在负载下变形时,不仅可以在下降深度方面确定负载钩与吊臂或吊运车的距离,而且还可以确定负载钩相对于吊臂或吊运车上的吊索下落点的水平横向偏移量和/或负载钩相对于吊臂的水平偏转,并因此确定负载钩相对于起重机结构的位置(包括水平相对位置)。
有利地,无线电模块的分布布置使得它们彼此具有视觉接触,至少在负载钩和起重机结构之间没有建筑物边缘或类似物体轮廓。
为了能够为无线电模块供电,可以向无线电模块分配例如电池或可充电蓄电池形式的电储能器,其中,每个无线电模块单独分配有自己的储能器或一组无线电模块分配有一个公共的储能器。
作为这种电池或蓄电池的替代或补充,负载钩上的无线电模块至少还可以分配有发电机,该发电机提供电能并可通过偏转辊的旋转运动驱动,吊索通过该偏转轮偏转。发电机提供的电流可以直接提供给无线电模块,但也可以有利地存储在蓄电池中。通过这种可由偏转辊驱动的发电机,可以避免连接到负载钩的电源线,并仍可以确保持续的能量供应。
如有必要,吊运车和/或吊臂上的无线电模块还可以分配有一个或多个发电机,并可能与可充电蓄电池连接,其中,吊运车和/或吊臂上的发电机也可以有利地由偏转轮的旋转运动来驱动,吊索和/或吊运车缆索通过该偏转轮偏转。
原则上,无线电模块之间交换的无线电信号的评估能够以不同的方式进行,并可能还包括不同的、多种评估方法,以便冗余地确定无线电模块相对彼此的位置并因此的负载钩位置,或从多个特定位置值形成平均值。
特别地,定位装置可以包括传播时间确定装置,以便确定无线电模块之间的无线电信号的传播时间。可以根据无线电信号的传播时间确定无线电模块之间的距离,特别是两个无线电模块之间的距离变化,因为这种变化伴随着传输时间的变化。
在此,信号的传播时间又能够以各种方式确定。例如,所述传播时间确定装置可以包括到达时间差(TDOA:Time Difference of Arrival)模块和/或到达时间(TOA:Time of Arrival)模块,通过它们可以确定到达时间的差或到达时间本身,其中一个无线电模块发送的无线电信号在该到达时间被另一无线电模块接收。特别地,TDOA模块可以测量无线电信号所具有的时间戳的传播时间差,例如从负载钩无线电模块到起重机结构(例如,吊运车和/或吊臂)上的各种其他无线电模块。评估装置可以根据传播时间差计算负载钩无线电模块的所在地或位置。
与此相反,TOA模块可以使用绝对时间工作,其中,可以根据在其中一个无线电模块上发送和在另一无线电模块上接收之间的时间延迟来确定距离。例如,其中一个无线电模块可以发送时间戳,而在另一无线电模块上确定接收时间,然后可以由此计算绝对无线电传播时间。
有时,传播时间传感器也被称为TOF模块,它可以确定无线电信号从一无线电模块到另一无线电模块的传播时间。
作为确定传播时间的替代或补充,还可以确定无线电模块从另一无线电模块接收无线电信号时的相应角度。用于确定无线电信号角度的相应角度确定装置可以例如包括相移模块,该相移模块可以确定有效信号(Nutzsignale)或在不同的无线电模块处接收的无线电信号的相移。替代地或补充地,衰减确定模块可以确定无线电信号接收器的天线中的由方向特性引起的衰减,并由此确定无线电信号的角度。
评估装置可以根据可在不同无线电模块上确定的特定无线电信号角度来计算无线电模块相对彼此的位置并因此计算负载钩位置。特别地,评估装置可以用三角学方法评估无线电信号角度,以便结合无线电模块的已知安装位置计算位置,特别是计算负载钩位置。
在本发明的改进示例中,无线电模块可被设计为根据已知的移动通信标准(例如,4G或5G)工作的移动通信模块。负载钩上的无线电模块或起重机结构上的无线电模块的位置确定可以通过这种移动通信信号得到额外的改进或也可以仅使用它们来执行。
原则上,优选地包括所述传播时间确定装置和/或角度确定装置的所述评估装置可被设置在起重机的不同位置处,其例如被实施且集成在还执行其他起重机控制任务(例如,移动控制或负载限制)的起重机控制器中。然而,替代地,所述评估装置还可以特别集成到其中一个所述无线电模块中,或与其中一个无线电模块一起形成共同的组件或组合在共同的电子组件中。因此,节省了其他数据传输路径和与此伴随的延迟。在接收到无线电信号的位置处立即进行该无线电信号的评估。
在本发明的有利改进示例中,定位装置不仅可以利用所述无线电信号及其评估,而且还可以使用其他传感器信号。特别地,至少在负载钩上可设置有至少一个传感器装置,通过该传感器装置可以确定位置数据和/或对准数据和/或加速度数据,这些数据可由定位装置或其评估装置评估并用于确定负载钩的位置。
例如,可以将惯性测量装置附接到负载钩,该惯性测量装置特别可以包括加速度和转速传感器构件以提供加速度和转速信号。这种惯性测量装置有时也被称为惯性测量设备(IMU:Inertial-Messeinrichtung),并可以测量作用在负载钩上的加速度以及出现的转速。
有利地,由传感器装置测量的加速度和/或转速或通常测量的位置数据和/或对准数据和/或加速度数据可以作为传输无线电信号的一部分而从负载钩本身上的无线电模块传输到其他无线电模块。然而,替代地,单独的传输模块也是可能的,以便将传感器数据传输到定位装置的评估装置。
有利地,所述评估装置可被设计为使得为了确定负载钩位置而以上述方式评估和使用电磁无线电模块的无线电信号,并使用传感器装置的位置数据和/或对准数据和/或加速度数据,特别是由该传感器装置测量的加速度来确定位置。无线电信号或由其推导出的变量(例如,传播时间)或无线电信号和所述传感器信号(例如,加速度和转速)的同时使用例如可以通过适用的滤波装置实现。例如,评估装置可以包括卡尔曼滤波器,以合并和匹配不同的信号集。
附图说明
下面将基于优选的示例性实施例和相关附图更详细地说明本发明。
图1示出了根据本发明的一有利实施例的旋转塔式起重机形式的起重机的侧视图,在其吊臂上设置有可移动的吊运车,连接到负载钩的吊索从该吊运车引出。
图2示出了图1的起重机的示意性侧视图,其示出了无线电模块在起重机负载钩、吊运车和吊臂上的布置。
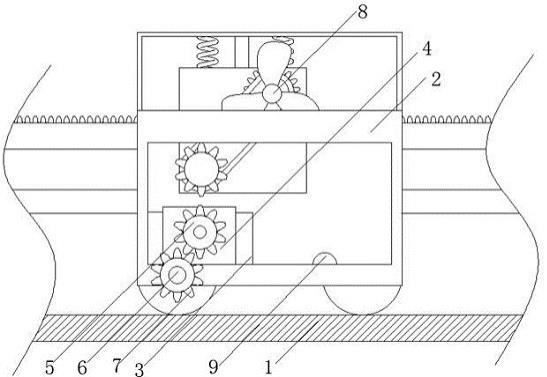
图3示出了前述附图的起重机的平面图,其示出了负载钩相对于吊运车的横向偏转以及无线电模块在负载钩和吊运车上的分布。
具体实施方式
如图1所示,起重机例如可以被设计为上旋转的塔式起重机1,其竖直延伸的塔架2承载吊臂3以及可能的平衡臂。所述吊臂3可相对于塔架2围绕竖直的塔架纵向轴线4旋转并处于至少大致水平的位置。替代地,在设计为下旋转式起重机的情况下,塔架2也可以与吊臂3一起相对于起重机基座旋转。此外,吊臂3也可以围绕水平的横向轴线上下俯仰。
吊运车5可移动地悬挂在所述吊臂3上,使得吊运车5可以基本在吊臂3的整个长度上移动,以便能够改变负载钩7的外展量。在此,所述负载钩7紧固在吊索6上,该吊索在所述吊运车5上运行,以便能够降低和升高负载钩7。在这种情况下,在负载钩7上能够以已知的方式设置具有一个或多个偏转轮(Umlenkrollen)的负载滑轮(Lastflasche)13,吊索6通过该负载滑轮偏转或敷紧在负载钩7上。
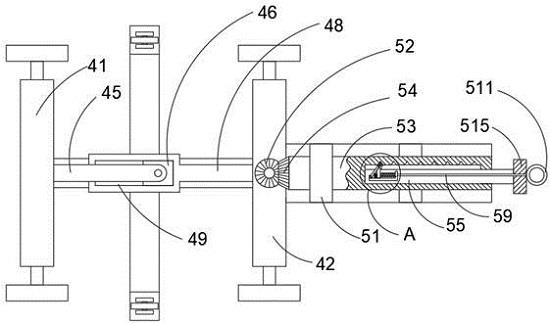
如图2所示,负载钩定位装置8包括多个电磁无线电模块9,它们彼此交换电磁无线电信号并例如可被设计为符合5G标准的移动无线电模块。
在此,至少一个无线电模块9附接在负载钩7上,例如居中地位于所述偏转滑轮的上侧。有利地,至少三个其他无线电模块9布置在所述吊运车5上,其中,吊运车5上的无线电模块9可以在吊臂的纵向方向上且在相对于该吊臂纵向方向的横向上彼此偏移地定位,特别是定位在布置在水平面内的近似等边三角形的角部处。换句话说,吊运车5上的无线电模块9可布置在相同的高度处,并可以布置成相对于吊臂纵向轴线纵向地且横向地偏移。
如图2所示,其他无线电模块9可附接到起重机吊臂3的端部。
如图2和3中的箭头所示,无线电模块9都彼此交替地交换无线电信号。替代地或补充地,也可以布置用于传输信号的电缆。
所述负载钩定位装置8包括评估装置10,该评估装置可被设计为电子计算单元的形式,例如该评估装置具有微型处理器和可存储有评估算法或评估软件的程序存储器。
电子评估装置10可以设置在其中一个无线电模块9上,例如设置在附接到塔架2周围的吊臂3上的无线电模块9上,但可选地也设置为起重机控制器的一部分。
在此,所述电子评估装置10有利地包括传播时间确定装置11,该传播时间确定装置可以作为软件模块由微型处理器处理,并可以确定无线电模块9之间的信号传播时间。
如上所述,所述传播时间确定装置11可以包括TDOA模块12、TOA模块13和/或TOF模块14,以便根据到达时间的差值和/或绝对到达时间和/或传输时间来确定信号传播时间,并由此计算无线电模块9之间的距离。所述TDOA、TOA或TOF模块12、13、14也能够以软件模块的形式由电子评估装置的微型处理器进行处理。所述评估装置10根据信号传播时间计算无线电模块之间的距离,并由此计算出附接在负载钩7上的无线电模块9相对于吊运车5和/或吊臂3的位置。
此外,所述评估装置10还可以包括角度确定装置15,借助于该角度确定装置可以计算无线电模块9之间的角度,特别是通过各个无线电模块9处的无线电信号的相移和/或通过由方向特性导致的无线电模块9的天线中的衰减来进行计算。所述角度确定装置15可包括相应设计的可确定相移和衰减的相移和/或衰减模块16和17。所述相移和衰减模块16和17也可被设计为可由电子评估装置10的处理器执行的软件模块的形式。
根据测量或确定的相移和/或衰减,角度确定装置15可以计算无线电信号的角度并因此计算出无线电模块9之间的角度。评估装置10可以利用三角学方法计算根据以此方式确定的无线电信号角计算出负载钩上的无线电模块9的位置,并因此计算出负载钩位置。
此外,在负载钩9上设置有用于测量负载钩7的位置值和/或对准值和/或加速度值的传感器装置18,其中,这种传感器装置18特别可以测量出现在负载钩7上的加速度和转速。为此,传感器装置18可以特别包括安装在负载钩7上的惯性测量装置,该惯性测量装置可以将其测量信号优选无线地传输到负载钩定位装置8的评估装置10。
例如根据DE 10 2007 039 408 A1的本身已知的方法,电子评估装置10可以根据由传感器装置18提供的加速度和转速来计算负载钩位置。为了提高检测精度,可以有利地将基于加速度和转速的这种计算的结果与电子评估装置10或其中一个无线电模块9中的无线电信号的位置确定结果(例如,传播时间测量)相互合并,这例如可以借助于卡尔曼滤波器实现。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。