1.本实用新型涉及一种数据机房巡检机器人用于开关机柜门的手指机构,特别涉及一种可提供精准定位、开关服务器和列头柜机柜门的移动机器人手臂末端的执行机构,属于移动巡检机器人领域。
背景技术:
2.随着互联网行业的快速发展,运维中心及运维服务器的应用越来越广泛。为保证机房内服务器的正常运作,及时地发现设备缺陷或安全隐患,往往需要机房运维人员定时或不定时地对机房内的设备进行检查,并对仪器仪表设备进行手工抄录,此做法不仅工作量大,而且受环境、人员素质等因素影响,易造成检测数据不准确,从而使得巡视效率及质量达不到预期。针对人工巡检效率及质量低的问题,利用全智能巡检机器人替代人工对机房环境及设备进行检查,不仅高效率地完成任务,还可提高运维中心的竞争力。
3.利用全智能巡检机器人进行机房环境24小时的全方位、定时或不定时巡检,提高了机房运维的可靠性。若机房巡检机器人能够准确地开关机柜门,那么巡检机器人在机房内的巡检内容增多,可靠性也会增强。同时,为了实现巡检机器人在狭小的机房过道内巡检服务器、动力柜等,通常会为巡检机器人安装手臂,但工业不仅价格高,而且手臂体积大、质量重,难以规模性地安装机器人的机身上。因此,需要开发轻量级的机械手臂以及与之配合的开关机柜门的手指关节。
技术实现要素:
4.为解决上述技术问题,本实用新型的目的在于提供一种巡检机器人的手指关节,可配合轻量级机械臂实现服务器机柜门以及动力机柜门的开关动作,多种传感器的融合有效地提高了开门的准确性。本实用新型机构设计简单,安装便捷,工作可靠,效果明显。本实用新型所采取的技术方案,如下:
5.一种巡检机器人的手指关节,包括前臂、手指电机、手指前盖、手指顶盖、手指中架、手指下盖、下压触发开关、前顶触发开关、脱钩红外检测、前顶板摩擦片和防脱摩擦片,所述的手指电机安装在前臂上,为手指关节提供一个旋转自由度,手指中架固定在手指电机的前端,且为l型,手指前盖通过卡扣固定在手指电机上,且通过卡销安装在手指中架的上方,手指下盖通过卡销安装在手指中架的下方,手指顶盖通过卡扣固定在手指中架的前方,下压触发开关设置在手指中架上,且位于手指下盖内部,用于判断是否下压到门把手,前顶触发开关固定在手指中架的前端且位于手指顶盖的后方,用于判断机械手臂是否接触到门面,脱钩红外检测设置在手指中架的内侧前方,开关机柜门时用于检测手指关节否与门把手脱钩。
6.进一步地,所述的下压触发开关在手指中架上前后各设置一个。
7.进一步地,所述的前顶触发开关在手指中架前方上下各设置一个。
8.进一步地,所述的手指前盖在工作时通过颜色进行定位。
附图说明
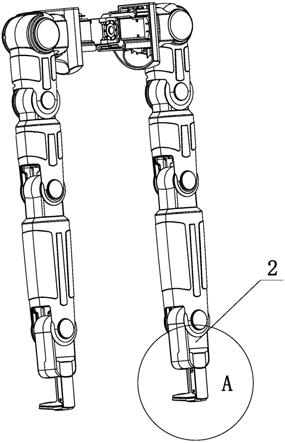
9.图1为本实用新型的整体安装结构图。
10.图2为本实用新型的整体安装侧视图。
11.图3为本实用新型的整体安装俯视图。
12.图4为图1a处的局部放大图。
13.图5为图2b处的局部放大图。
14.图6为图3c处的局部放大图。
15.图中所示,1为前臂,2为手指电机,3为手指前盖,4为手指顶盖,5为手指中架,6为手指下盖,7为下压触发开关,8为前顶触发开关,9为脱钩红外检测,10为前顶板摩擦片,11为防脱摩擦片。
具体实施方式
16.实施例1
17.参照附图1至附图6,一种巡检机器人的手指关节,包括前臂1、手指电机2、手指前盖3、手指顶盖4、手指中架5、手指下盖6、下压触发开关7、前顶触发开关8、脱钩红外检测9、前顶板摩擦片10和防脱摩擦片11,所述的手指电机2安装在前臂1上,为手指关节提供一个旋转自由度,手指中架5固定在手指电机2的前端,且为l型,手指前盖3通过卡扣固定在手指电机2上,且通过卡销安装在手指中架5的上方,手指下盖6通过卡销安装在手指中架5的下方,手指顶盖4通过卡扣固定在手指中架5的前方,下压触发开关7设置在手指中架5上,且位于手指下盖6内部,用于判断是否下压到门把手,前顶触发开关8固定在手指中架5的前端且位于手指顶盖4的后方,用于判断机械手臂是否接触到门面,脱钩红外检测9设置在手指中架5的内侧前方,开关机柜门时用于检测手指关节是否与门把手脱钩。
18.实施例2
19.本实施例与实施例1区别在于,所述的下压触发开关7在手指中架5上前后各设置一个。
20.实施例3
21.本实施例与实施例1区别在于,所述的前顶触发开关8在手指中架5前方上下各设置一个。
22.实施例4
23.本实施例与实施例1区别在于,所述的手指前盖3在工作时通过颜色进行定位。
24.具体使用原理:本实用新型公开了一种巡检机器人的手指关节,是配合机器人的机械手臂开关机柜门时用到的机构,当巡检机器人打开被巡检的机柜门时,手指关节当中的手指顶盖4首先碰到机柜门,进而按下前顶触发开关8,从而“告知”机器人手臂已接触到机柜门;接着,机器人的眼睛通过识别手指前盖3上的颜色块和机柜门上的标签进行左右定位,定位完成后,手指关节下压,进而勾住机柜门上的把手,判断是否下压完成是通过触发手指下盖6内部的下压触发开关7实现的,下压完成后便进行开门动作。其中,手指中架5的内部设有脱钩红外检测9的光电传感器,可以检测机械手臂在开门过程中是否脱钩,用以防止脱钩的发生。
25.上述实施例仅为本实用新型的较佳的实例而已,并非是对本实用新型实施方式的
限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无需也无法对所有的实施方式予以穷举,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的权利要求保护范围之内。
技术特征:
1.一种巡检机器人的手指关节,其特征在于,包括前臂(1)、手指电机(2)、手指前盖(3)、手指顶盖(4)、手指中架(5)、手指下盖(6)、下压触发开关(7)、前顶触发开关(8)、脱钩红外检测(9)、前顶板摩擦片(10)和防脱摩擦片(11),所述的手指电机(2)安装在前臂(1)上,为手指关节提供一个旋转自由度,手指中架(5)固定在手指电机(2)的前端,且为l型,手指前盖(3)通过卡扣固定在手指电机(2)上,且通过卡销安装在手指中架(5)的上方,手指下盖(6)通过卡销安装在手指中架(5)的下方,手指顶盖(4)通过卡扣固定在手指中架(5)的前方,下压触发开关(7)设置在手指中架(5)上,且位于手指下盖(6)内部,用于判断是否下压到门把手,前顶触发开关(8)固定在手指中架(5)的前端且位于手指顶盖(4)的后方,用于判断机械手臂是否接触到门面,脱钩红外检测(9)设置在手指中架(5)的内侧前方,开关机柜门时用于检测手指关节是否与门把手脱钩。2.根据权利要求1所述的巡检机器人的手指关节,其特征在于,所述的下压触发开关(7)在手指中架(5)上前后各设置一个。3.根据权利要求1所述的巡检机器人的手指关节,其特征在于,所述的前顶触发开关(8)在手指中架(5)前方上下各设置一个。4.根据权利要求1所述的巡检机器人的手指关节,其特征在于,所述的手指前盖(3)在工作时通过颜色进行定位。
技术总结
本实用新型涉及一种巡检机器人的手指关节,包括前臂、手指电机、手指前盖、手指顶盖、手指中架、手指下盖、下压触发开关、前顶触发开关、脱钩红外检测、前顶板摩擦片和防脱摩擦片,所述的手指电机安装在前臂上,手指中架固定在手指电机的前端,且为L型,手指前盖通过卡扣固定在手指电机上,且通过卡销安装在手指中架的上方,手指下盖通过卡销安装在手指中架的下方,手指顶盖通过卡扣固定在手指中架的前方,下压触发开关设置在手指中架上,且位于手指下盖内部,前顶触发开关固定在手指中架的前端且位于手指顶盖的后方,脱钩红外检测设置在手指中架的内侧前方。本实用新型机构设计简单,安装便捷,工作可靠,效果明显。效果明显。效果明显。
技术研发人员:陈广娟 陈泓宇 孙晨洋 马晟馨
受保护的技术使用者:烟台职业学院
技术研发日:2021.01.04
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

