1.本实用新型涉及工程机械的领域,特别涉及一种轻型的传动摆臂机构。
背景技术:
2.重载机器人作为一种高端自动化装备,在焊接、搬运、码垛、喷涂等领域具有广泛应用,随着自动化产业不断升级,对重载机器人的应用需求也在不断提高,尤其是大跨度大负载作业。现在的重载机器人一般包括传动摆臂机构、摆动驱动组件及安装于传动摆臂机构末端上的末端执行器,传动摆臂机构包括两节铰接的传动臂,摆动驱动组件可驱动两节传动臂摆动,通过两节传动臂来带动末端执行器执行不同的重载作业,而现有的传动臂一般为铸造件,传统的铸造件而逐渐暴露出它的局限性,不可重构的特性约束了机器人的工作范围,导致其无法进行大跨度作业,同时铸造件的自重大,机器人的负载自重比难以得到进一步提高。因此,为了实现机器人的轻量化和臂长可重构以适应更大跨度的重载作业,亟需一种结构简单、力传递特性好,使用价值高的传动摆臂机构。此外,现有的传动摆臂机构难以保证末端执行器平动,即是保持水平的姿态运动。
技术实现要素:
3.本实用新型目的在于提供一种轻型的传动摆臂机构,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
4.为解决上述技术问题所采用的技术方案:
5.一种轻型的传动摆臂机构,其包括:第一摆臂组件、第二摆臂组件,第一摆臂组件包括旋转座、第一臂体、第一连杆、第一连接块,所述旋转座第一铰接端和第二铰接端,所述第一铰接端和第二铰接端呈间隔设置于竖直面上,所述第一连接块设置有第三铰接端、第四铰接端和第五铰接端,所述第三铰接端、第四铰接端和第五铰接端依次呈三角布置于竖直面上,所述第一臂体的一端与所述第一铰接端铰接,所述第一臂体的另一端与所述第三铰接端铰接,所述第一连杆的一端与所述第二铰接端铰接,所述第一连杆的另一端与所述第四铰接端铰接;第二摆臂组件包括第二臂体、第二连杆、第二连接块,所述第二连接块设置有第六铰接端、第七铰接端,所述第六铰接端和第七铰接端呈间隔设置于竖直面上,所述第二臂体的一端与所述第三铰接端铰接,所述第二臂体的另一端与所述第六铰接端铰接,所述第二连杆的一端与所述第五铰接端铰接,所述第二连杆的另一端与所述第七铰接端铰接。
6.本实用新型的有益效果是:第一摆臂组件上的第一臂体、第一连杆、第一连接块与旋转座构成平行四边形结构,以及第二摆臂组件上的第二臂体、第二连杆、第二连接块与第一连接块也构成平行四边形结构,保证了传动摆臂机构的刚性及负载能力,同时根据平行四边形的运动特性,当外设的摆动驱动组件驱动第一臂体绕所述第一铰接端的铰接轴线摆动、驱动第二臂体绕所述第三铰接端的铰接轴线摆动的过程中,可同时带动第一连杆和第二连杆联动,使得两个平行四边形结构伸缩活动,令第二连接块始终保持平动。
7.作为上述技术方案的进一步改进,所述旋转座设置有配重结构,所述配重结构设置有连接端和自由端,所述连接端与第一铰接端连接,所述配重结构设置于第一臂体的背侧。
8.通过配重结构可提高第一臂体的承载能力,使得第一臂体的长度可延长,进而可扩大作业跨度的范围。
9.作为上述技术方案的进一步改进,所述第一臂体和第二臂体均为可自由伸缩拼接并进行固定的可重构杆件结构。这使得第一臂体和第二臂体可根据应用需求改变臂长,使该机器人适应不同跨度的重载作业。
10.作为上述技术方案的进一步改进,所述第一臂体和第二臂体均包括有多个拼接件,多个拼接件依次拼接。可根据不同的需求,选取不同数量的拼接件进行拼接,且相邻两个拼接件通过锁紧构件锁紧固定,锁紧构件可为锁紧螺栓。
11.作为上述技术方案的进一步改进,所述第一臂体包括第一端部拼接件、至少一个中间拼接件、第二端部拼接件,所述中间拼接件的一端设置有拼接插槽,所述中间拼接件的另一端设置有拼接插块,所述第一端部拼接件的一端设置有所述拼接插槽,所述第二端部拼接件的一端设置有所述拼接插块,所述拼接插块与所述拼接插槽可相互插接,至少一个中间拼接件依次插接形成中间拼接结构,所述第二端部拼接件上的拼接插块与所述中间拼接结构一端的中间拼接件上的拼接插槽插接,所述第一端部拼接件上的拼接插槽与所述中间拼接结构另一端的中间拼接件上的拼接插块插接。
12.在使用时,可通过添加或者减少中间拼接件来调整第一臂体的长度,并且第一端部拼接件、中间拼接件与第二端部拼接件通过拼接插块与所述拼接插槽插接配合的结构实现连接,方便拆装,且结构强度大。
13.而所述第二臂体包括第一端部拼接件和第二端部拼接件,所述第二端部拼接件上的拼接插块与第一端部拼接件上的拼接插槽插接。
14.作为上述技术方案的进一步改进,所述轻型的传动摆臂机构还包括末端执行组件,所述末端执行组件包括安装于第二连接块上的执行电机、与执行电机传动连接的执行件,所述执行件设置于第二连接块的底部。在传动摆臂机构运动的过程中,可保证执行件始终保持平动,而执行件又可通过执行电机带运动,来实现不同的执行动作,而执行件可根据不同的功能,选取吸盘、夹具等结构。
附图说明
15.下面结合附图和实施例对本实用新型做进一步的说明;
16.图1是本实用新型所提供的并联驱动的重载机器人,其一实施例的第二摆动驱动组件采用伸缩杆驱动结构时的结构示意图一;
17.图2是本实用新型所提供的并联驱动的重载机器人,其一实施例的第二摆动驱动组件采用伸缩杆驱动结构时的结构示意图二;
18.图3是本实用新型所提供的并联驱动的重载机器人,其一实施例的第二摆动驱动组件采用第二摆动电机与第二摆动传动结构时的结构示意图一;
19.图4是本实用新型所提供的并联驱动的重载机器人,其一实施例的第二摆动驱动组件采用第二摆动电机与第二摆动传动结构时的结构示意图二;
20.图5是本实用新型所提供的并联驱动的重载机器人,其一实施例的末端执行组件与第二连接块安装的结构示意图;
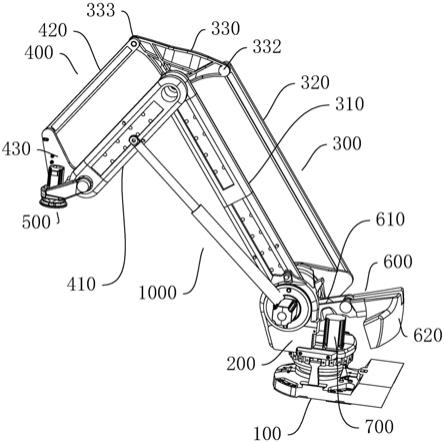
21.图6是本实用新型所提供的传动摆臂机构,其一实施例的结构示意图;
22.图7是本实用新型所提供的传动摆臂机构,其一实施例的第一臂体的分解图;
23.图8是本实用新型所提供的传动摆臂机构,其一实施例的第二臂体的分解图。
具体实施方式
24.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
25.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.在本实用新型的描述中,如果具有“若干”之类的词汇描述,其含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。
27.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
28.参照图5至图8,本实用新型的轻型的传动摆臂机构作出如下实施例:
29.如图6所示,本实施例的轻型的传动摆臂机构包括第一摆臂组件300、第二摆臂组件400,其中第一摆臂组件300包括旋转座200、第一臂体310、第一连杆320、第一连接块330,所述旋转座200第一铰接端210和第二铰接端220,所述第一铰接端210和第二铰接端220呈间隔设置于竖直面上,所述第一连接块330设置有第三铰接端331、第四铰接端332和第五铰接端333,所述第三铰接端331、第四铰接端332和第五铰接端333依次呈三角布置于竖直面上,所述第一臂体310的一端与所述第一铰接端210铰接,所述第一臂体310的另一端与所述第三铰接端331铰接,所述第一连杆320的一端与所述第二铰接端220铰接,所述第一连杆320的另一端与所述第四铰接端332铰接,第二摆臂组件400包括第二臂体410、第二连杆420、第二连接块430,所述第二连接块430设置有第六铰接端431、第七铰接端432,所述第六铰接端431和第七铰接端432呈间隔设置于竖直面上,所述第二臂体410的一端与所述第三铰接端331铰接,所述第二臂体410的另一端与所述第六铰接端431铰接,所述第二连杆420的一端与所述第五铰接端333铰接,所述第二连杆420的另一端与所述第七铰接端432铰接。
30.本实施例通过第一摆臂组件300上的第一臂体310、第一连杆320、第一连接块330与旋转座200构成平行四边形结构,以及第二摆臂组件400上的第二臂体410、第二连杆420、第二连接块430与第一连接块330也构成平行四边形结构,实现轻型化,且可保证了传动摆臂机构的刚性及负载能力,同时根据平行四边形的运动特性,当外设的摆动驱动组件驱动第一臂体310绕所述第一铰接端210的铰接轴线摆动、驱动第二臂体410绕所述第三铰接端
331的铰接轴线摆动的过程中,可同时带动第一连杆320和第二连杆420联动,使得两个平行四边形结构伸缩活动,令第二连接块430始终保持平动。
31.同时,如图5所示,所述轻型的传动摆臂机构还包括末端执行组件500,所述末端执行组件500包括安装于第二连接块430上的执行电机510、与执行电机510传动连接的执行件520,所述执行件520设置于第二连接块430的底部,执行件520可根据不同的功能,选取吸盘、夹具等结构,此外,执行件520可通过执行电机510带运动,来实现不同的执行动作。
32.进一步地,为了提高第一臂体310的承载能力,所述旋转座200设置有配重结构600,所述配重结构600设置有连接端610和自由端620,所述连接端610与第一铰接端210连接,所述配重结构600设置于第一臂体310的背侧,使得第一臂体310的长度可延长,进而可扩大末端执行组件500的作业跨度范围。
33.更进一步地,所述第一臂体310和第二臂体410均为可自由伸缩拼接并进行固定的可重构杆件结构,这使得第一臂体310和第二臂体410可根据应用需求改变臂长,使该机器人适应不同跨度的重载作业。具体地:所述第一臂体310和第二臂体410均包括有多个拼接件,多个拼接件依次连接,在一些实施例中相邻两个拼接件可通过锁紧螺栓锁紧固定,可根据不同的需求,选取不同数量的拼接件进行拼接。
34.更具体地,如图7所示,本实施例中的所述第一臂体310包括第一端部拼接件1100、至少一个中间拼接件1200、第二端部拼接件1300,所述中间拼接件1200的一端设置有拼接插槽1400,所述中间拼接件1200的另一端设置有拼接插块1500,所述第一端部拼接件1100的一端设置有所述拼接插槽1400,所述第二端部拼接件1300的一端设置有所述拼接插块1500,所述拼接插块1500与所述拼接插槽1400可相互插接,至少一个中间拼接件1200依次插接形成中间拼接结构,所述第二端部拼接件1300上的拼接插块1500与所述中间拼接结构一端的中间拼接件1200上的拼接插槽1400插接,所述第一端部拼接件1100上的拼接插槽1400与所述中间拼接结构另一端的中间拼接件1200上的拼接插块1500插接。进而在使用时,可通过添加或者减少中间拼接件1200来调整第一臂体310的长度,并且第一端部拼接件1100、中间拼接件1200与第二端部拼接件1300通过拼接插块1500与所述拼接插槽1400插接配合的结构实现连接,方便拆装,且结构强度大。
35.如图8所示,本实施例的第二臂体410包括第一端部拼接件1100和第二端部拼接件1300,所述第二端部拼接件1300上的拼接插块1500与第一端部拼接件1100上的拼接插槽1400插接。
36.如图1至图4所示,本实施例还提供一种并联驱动的重载机器人,其包括上述的传动摆臂机构之外,还包括固定底座100、旋转驱动组件、第一摆动驱动组件和第二摆动驱动组件。
37.其中旋转座200可转动安装于固定底座100,所述旋转座200设置有呈竖向延伸的旋转轴线,而旋转驱动组件用于驱动所述旋转座200绕所述旋转轴线转动,具体地:旋转驱动组件包括固定于旋转座200上的旋转驱动电机700,所述旋转驱动电机700通过旋转传动结构与固定底座100传动连接,本实施例中的旋转传动结构为齿轮传动结构,旋转驱动电机的输出轴连接的主动齿轮,在固定底座100固定有固定齿环,主动齿轮与固定齿环啮合。在其他一些实施例中,旋转传动结构可为其他传动结构。
38.而第一摆动驱动组件用于驱动所述第一臂体310绕第一铰接端210的铰接轴线摆
动,具体地:第一摆动驱动组件包括固定于旋转座200上的第一摆动电机800,所述第一摆动电机800通过第一摆动传动结构与第一臂体310传动连接,本实施例通过第一摆动电机800来带动第一臂体310摆动,其中第一摆动传动结构可为摆动驱动轴、齿轮传动结构等等。
39.第二摆动驱动组件用于驱动所述第二臂体410绕所述第三铰接端331的铰接轴线摆动。第二摆动驱动组件可为多种驱动装置。
40.如图1和图2所示,所述第二摆动驱动组件包括伸缩杆驱动结构1000,所述伸缩杆驱动结构1000的一端与所述第一铰接端210铰接,所述伸缩杆驱动结构1000的另一端与第二臂体410铰接,并且所述伸缩杆驱动结构1000与第二臂体410的铰接处设置于第二臂体410两端之间,通过伸缩杆驱动结构1000的伸缩运动来带动第二臂体410摆动。
41.如图3和图4所示,第二摆动驱动组件包括固定于旋转座200上的第二摆动电机900、第二摆动传动结构,所述第二摆动传动结构包括第一传动连杆910和第二传动连杆920,所述第一传动连杆910的一端与第二传动连杆920的一端铰接,所述第一传动连杆910的另一端与第二摆动电机900的输出轴传动连接,所述第二传动连杆920的另一端与第二臂体410铰接,并且所述第二传动连杆920与第二臂体410的铰接处设置于第二臂体410两端之间,所述第二摆动电机900的输出轴与第一铰接端210同轴设置,通过第二摆动电机900带动第一传动连杆910摆动,而第一传动连杆910通过第二传动连杆920带动第二臂体410运动,实现第二臂体410的摆动。
42.同时根据平行四边形的运动特性,在第一摆动驱动组件驱动第一臂体310绕所述第一铰接端210的铰接轴线摆动、第二摆动驱动组件驱动第二臂体410绕所述第三铰接端331的铰接轴线摆动、以及旋转驱动组件驱动旋转座200绕所述旋转轴线转动的过程中,可同时带动第一连杆320和第二连杆420联动,使得两个平行四边形结构伸缩活动,令第二连接块430上的末端执行组件500始终保持平动;此外,旋转驱动组件、第一摆动驱动组件和第二摆动驱动组件均安装在旋转座200上,有效降低了电机自重造成偏重力矩带来的不良影响。
43.上述的铰接处的铰接轴线均相互平行设置,且呈横向延伸设置。
44.本实施例可在机器人运动的过程中,可保证执行件520始终保持平动。
45.以上对本实用新型的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可作出种种的等同变型或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

