1.本实用新型涉及建筑机器领域,具体为一种建筑工程用机器人。
背景技术:
2.建筑机器人先后经历了机械传动和液压传动两代。现机器人化的工程机械被称为第三代;建筑机器人能遥控、自动和半自动控制,可以在自然环境中进行多种作业,其中以自然作业为最大特征;建筑机器人的机种很多,按其共性技术可归纳为三种:操作高技术、节能高技术和故障自行诊断技术。
3.现阶段的建筑机器人存在机构多暴露在地表外,容易造成设备的损坏的问题;存在施工过程中驱动力不足,无法进行大功率作业的问题。因此,本领域技术人员提供了一种建筑工程用机器人,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种建筑工程用机器人,以解决上述背景技术中提出的问题。
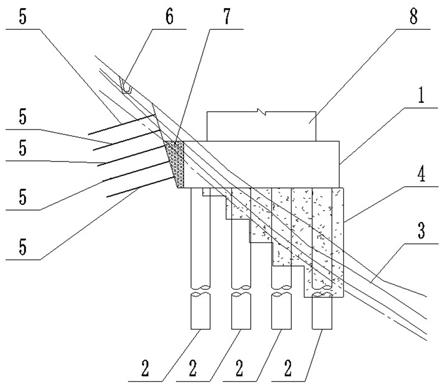
5.为实现上述目的,本实用新型提供如下技术方案:一种建筑工程用机器人,包括地基底块,所述地基底块顶面安装有转动体,且转动体外侧安装有啮合转动齿轮,所述啮合转动齿轮上端面安装有转动机构,且转动机构顶面固定安装有安装板,所述安装板顶面安装有磁性连接座,且安装板外侧安装有设备保护壳,所述设备保护壳顶面转动安装有行人梯,所述安装板上端面固定安装有电控装置,且电控装置左侧转动安装有第一活动杆,所述第一活动杆顶端转动安装有第二活动杆,且第二活动杆下端伸缩连接有液压装置,所述第二活动杆前端固定安装有建筑辅助装置,解决了传统的建筑机器人设备大面积暴露在地表外,容易损坏和设备施工功率低的问题。
6.优选的,所述行人梯两侧端面固定安装有磁性柱,且行人梯底部转动安装有转动轴,所述安装板顶面螺纹安装有稳固螺钉,且安装板底面安装有承重柱,便于工程师进入安装板顶面。
7.优选的,所述第一活动杆后侧安装有第一活动销,且第一活动销外侧固定安装有第一固定座,所述第二活动杆底面安装有第二活动销,能够操纵挖掘装置进行施工。
8.优选的,所述建筑辅助装置包括挖掘铲斗,且挖掘铲斗后侧端面连接有承力杆,所述承力杆底面安装有驱动连接座,能够辅助施工人员进行建筑施工。
9.优选的,所述液压装置包括第一液压缸,所述第一液压缸顶面连接于驱动连接座,且第一液压缸底面安装有第二液压缸,所述第二液压缸顶面前侧安装有第二连接座,且第二液压缸底面转动安装有第二固定座,能够为机器人提供驱动力。
10.优选的,所述电控装置包括立柱,所述立柱顶面前侧安装有显示器,且显示器右侧安装有数据输入器,所述数据输入器下端面安装有指纹控制器,且数据输入器右侧安装有呼叫器,能够实现设备的自动控制。
11.优选的,所述转动机构包括环套,所述环套顶面螺纹安装有连接螺钉,且环套两侧壁面之间焊接安装有分层支撑柱,所述环套内侧顶端转动安装有主滚子轴承,且主滚子轴承底面安装有辅助滚子轴承,能够实现机器人的转向。
12.与现有技术相比,本实用新型的有益效果是:
13.(1)、一种建筑工程用机器人,通过给建筑工程用机器人安装设备保护壳和转动机构等部件,工作人员在建筑工地底面挖掘圆柱形深坑,内径与设备保护壳相同,完成深坑挖掘后,施工人员将设备保护壳埋入深坑,同时在设备保护壳内侧依次安装有地基底块、转动体和转动机构等部件,完成装配后的建筑机器人的安装板底面应于附近土层表面高度一致。
14.(2)、一种建筑工程用机器人,通过给建筑工程用机器人安装挖掘铲斗和活动杆等部件,在建筑施工过程中,挖掘铲斗的多自由度运动通过第一活动杆和第二活动杆进行操控,设备驱动力通过第一液压缸和第二液压缸提供,实现大型石块和坚硬土层的挖掘。
附图说明
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中建筑工程机器人的结构局部示意图;
17.图3为本实用新型中电控装置的结构局部示意图;
18.图4为本实用新型中转动机构的结构局部示意图。
19.图中:1、地基底块;2、转动体;3、啮合转动齿轮;4、设备保护壳;5、磁性连接座;6、行人梯;601、转动轴;602、磁性柱;7、第一活动杆;701、第一活动销;702、第一固定座;8、第二活动杆;801、第二活动销;9、建筑辅助装置;901、挖掘铲斗;902、承力杆;903、驱动连接座;10、液压装置;1001、第一液压缸;1002、第二连接座;1003、第二液压缸;1004、第二固定座;11、电控装置;1101、数据输入器;1102、显示器;1103、立柱;1104、呼叫器;1105、指纹控制器;12、安装板;1201、稳固螺钉;1202、承重柱;13、转动机构;1301、连接螺钉;1302、分层支撑柱;1303、环套;1304、主滚子轴承;1305、辅助滚子轴承。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1
‑
4,本实用新型实施例中,一种建筑工程用机器人,包括地基底块1,地基底块1顶面安装有转动体2,且转动体2外侧安装有啮合转动齿轮3,啮合转动齿轮3上端面安装有转动机构13,且转动机构13顶面固定安装有安装板12,安装板12顶面安装有磁性连接座5,且安装板12外侧安装有设备保护壳4,设备保护壳4顶面转动安装有行人梯6,安装板12上端面固定安装有电控装置11,且电控装置11左侧转动安装有第一活动杆7,第一活动杆7顶端转动安装有第二活动杆8,且第二活动杆8下端伸缩连接有液压装置10,第二活动杆8前端固定安装有建筑辅助装置9,解决了传统的建筑机器人设备大面积暴露在地表外,容易损坏和设备施工功率低的问题。
22.其中,行人梯6两侧端面固定安装有磁性柱602,且行人梯6底部转动安装有转动轴601,安装板12顶面螺纹安装有稳固螺钉1201,且安装板12底面安装有承重柱1202,便于工程师进入安装板12顶面;第一活动杆7后侧安装有第一活动销701,且第一活动销701外侧固定安装有第一固定座702,第二活动杆8底面安装有第二活动销801,能够操纵挖掘装置进行施工;建筑辅助装置9包括挖掘铲斗901,且挖掘铲斗901后侧端面连接有承力杆902,承力杆902底面安装有驱动连接座903,能够辅助施工人员进行建筑施工;液压装置10包括第一液压缸1001,第一液压缸1001顶面连接于驱动连接座903,且第一液压缸1001底面安装有第二液压缸1003,第二液压缸1003顶面前侧安装有第二连接座1002,且第二液压缸1003底面转动安装有第二固定座1004,能够为机器人提供驱动力;电控装置11包括立柱1103,立柱1103顶面前侧安装有显示器1102,且显示器1102右侧安装有数据输入器1101,数据输入器1101下端面安装有指纹控制器1105,且数据输入器1101右侧安装有呼叫器1104,能够实现设备的自动控制;转动机构13包括环套1303,环套1303顶面螺纹安装有连接螺钉1301,且环套1303两侧壁面之间焊接安装有分层支撑柱1302,环套1303内侧顶端转动安装有主滚子轴承1304,且主滚子轴承1304底面安装有辅助滚子轴承1305,能够实现机器人的转向。
23.工作原理:建筑工程用机器人的主体包括地基底块1、转动体2、设备保护壳4和建筑辅助装置9等部件,本设备相比于传统的建筑机器人,具有大范围大功率定点作业,工作人员首先在建筑工地底面挖掘圆柱形深坑,内径与设备保护壳4相同,完成深坑挖掘后,施工人员将设备保护壳4埋入深坑,同时在设备保护壳4内侧依次安装有地基底块1、转动体2和转动机构13等部件,完成装配后的建筑机器人的安装板12底面应于附近土层表面高度一致,机器人通过电控装置11进行自动化作业,工作人员在数据输入器1101内输入相关施工参数后,建筑机器人开始自动作业,在机器人工作过程中通过地底端的啮合转动齿轮3从外界接收驱动力,配合主滚子轴承1304和辅助滚子轴承1305,进行设备的大幅度转向,驱动力通过外置大型电机提供,而在建筑施工过程中,挖掘铲斗901的多自由度运动通过第一活动杆7和第二活动杆8进行操控,设备驱动力通过第一液压缸1001和第二液压缸1003提供,实现大型石块和坚硬土层的挖掘,相比于传统的机器人能够进行定点大范围施工。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。