1.本实用新型涉及一种支持冗余的双链路高精度差分定位记录装置,属于智能车载设备技术领域。
背景技术:
2.随着科技发展,车载定位移动终端成为越来越普遍的整车标配设备。车载定位移动终端是通过特定的定位技术来获取移动终端的位置信息(经纬度坐标),进而将位置信息作为数据源传输至其他设备主机中,为车主提供进一步服务。
3.在车载监控领域,定位技术可以为车载终端提供准确的位置信息,相比于以往只需要达到米级定位,随着自动驾驶等领域的不断发展,厘米级定位对于车载终端显得越来越迫切。差分定位技术作为厘米级定位实现的可行性方案,在厘米级高精度定位的实现应用中有很高的普及度。但是单一使用短距离电台覆盖技术,或单一使用4g网络覆盖,存在以下不足:
4.(1)短距离电台覆盖的距离有限制,且受到以差分基站为中心到车载终端的直线路径上的遮挡物对信号的影响,在覆盖区域内有存在盲区的问题;
5.(2)4g网络覆盖,则受到覆盖区域内4g信号的强弱,可能出现差分改正报文无法有效到达车载终端的问题;此外4g网络流量也会持续产生费用,对项目的经济性产生负担。
6.目前也有一些车载装置同时利用4g网络和电台信号进行定位,通常采用mcu(microcontroller unit,微控制单元)直接与4g模块和电台无线通信模块这两种信号接收装置进行连接实现,这一连接方式对于mcu的解算能力要求极高,不利于设备的小型化,且解算精度难以保障,因此亟需设计一种新的硬件连接结构予以实现。
技术实现要素:
7.为了解决现有技术的不足,本实用新型提供了一种支持冗余的双链路高精度差分定位记录装置,利用与解算cpu连接的电台无线通信模块和与微处理器mcu连接的4g模块,同时接收由电台覆盖和4g覆盖形成的冗余覆盖网络,实现无间断的厘米级高精度定位,并且定位数据解算过程由接解算cpu这一模块实现,mcu主要用于进行数据处理调度,连接结构合理,从而提供了一种高效率、高精度的差分定位记录硬件设备。
8.本实用新型为解决其技术问题所采用的技术方案是:提供了一种支持冗余的双链路高精度差分定位记录装置,包括高精度定位单元、4g模块以及微处理器mcu,微处理器mcu与高精度定位单元连接,高精度定位单元包括解算cpu、定位模块和片上ram,解算cpu通过uart接口与微处理器mcu连接,定位模块和片上ram分别与解算cpu连接,解算cpu与电台无线通信模块连接,4g模块、电台无线通信模块和定位模块分别与rf天线连接,微处理器mcu分别与can收发器和rs232模块连接,can收发器和rs232模块均与lemo接头连接。
9.微处理器mcu通过i2c接口与flash连接。
10.微处理器mcu通过sdio接口与sd卡槽连接。
11.微处理器mcu设有can通信接口。
12.定位模块采用支持gps和北斗定位的gnss定位模块。
13.微处理器mcu通过usb接口与4g模块连接。
14.微处理器mcu通过uart串口与高精度定位单元连接。
15.电台无线通信模块采用支持433mhz的电台模块。
16.微处理器mcu和高精度定位单元均封装于盒体中,盒体的顶面设有与mcu连接的状态指示灯,盒体的侧部设有电源和通信接口预留孔和tf天线预留孔,tf天线从tf天线预留孔中穿出。
17.本实用新型基于其技术方案所具有的有益效果在于:
18.本实用新型提供的一种支持冗余的双链路高精度差分定位记录装置中微处理器mcu与4g模块连接,用于实现通过ota网络协议与距离较远的高精度定位基站进行无线通信,获取高精度定位改正报文信息;微处理器mcu同时与高精度定位单元连接,可支持将通过4g网络得到的高精度定位改正报文信息传输至解算cpu,并从解算cpu获取解析后的高精度定位信息,采用标准nema报文格式数据;高精度定位单元与电台无线通信模块连接,可实现与远方的高精度定位基站进行无线通信,获取高精度定位改正报文信息,采用标准rtcm报文格式数据;定位模块可获取gps和/或北斗微信定位数据,位置精度≤2.5m cep;解算cpu可用于实现差分改正报文和从定位模块获取的原始定位观察信息的融合计算,得到水平精度≤2.5cm的位置信息;微处理器mcu可设置sd卡接口,用于进行定位信息和can总线数据保存,以及通过sd卡配置微处理器mcu主控单元的参数;微处理器mcu与can收发器连接,能够实现将高精度定位信息解析后以can报文的方式输出给其他数据采集主机或者自动驾驶主机。
附图说明
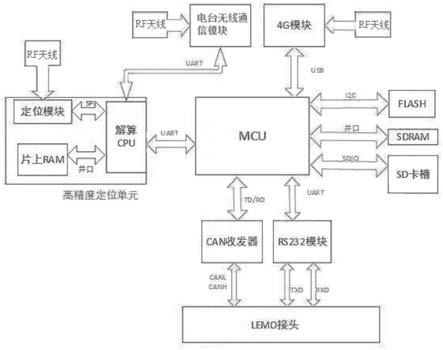
19.图1是本实用新型提供的一种支持冗余的双链路高精度差分定位记录装置的模块连接示意图。
20.图2是本实用新型涉及一种支持冗余的双链路高精度差分定位记录装置的外壳结构示意图。
21.图中:1
‑
盒体,2
‑
状态指示灯,3
‑
tf天线,4
‑
电源和通信接口预留孔。
具体实施方式
22.下面结合附图和实施例对本实用新型作进一步说明。
23.参照图1,本实用新型提供了一种支持冗余的双链路高精度差分定位记录装置,包括高精度定位单元、4g模块以及微处理器mcu(central processing unit,中央处理器),微处理器mcu通过uart串口与高精度定位单元连接,高精度定位单元连接包括解算cpu、定位模块和片上ram(random access memory,随机存取存储器),解算cpu通过uart(universal asynchronous receiver/transmitter,通用异步收发传输器)接口与微处理器mcu连接,定位模块和片上ram分别通过spi接口和并口与解算cpu连接,解算cpu通过uart接口与电台无线通信模块连接,4g模块、电台无线通信模块和定位模块分别与rf(radio frequency,射频)天线连接,微处理器mcu分别通过td/rd(tranceive data/receive data,信号收发)接
口与can收发器和rs232模块连接,can收发器和rs232模块分别通过canl/canh总线和txd/rxd总线与lemo(雷莫)接头连接。
24.其中,微处理器mcu通过usb接口与4g模块连接,电台无线通信模块采用支持433mhz的电台无线通信模块。
25.微处理器mcu通过i2c接口与flash(闪存)连接。
26.微处理器mcu通过并口与sdram(synchronous dynamic random access memory,同步动态随机存取内存)连接。
27.微处理器mcu通过sdio(secure digital input and output,安全数字输入输出)接口与sd卡槽连接。
28.微处理器mcu设有can通信接口。
29.微处理器mcu设有电源接口。
30.定位模块采用支持gps和北斗定位的gnss定位模块。
31.参照图2,微处理器mcu和高精度定位单元均封装于盒体1中,盒体的顶面设有与mcu连接的状态指示灯2,用于指示电台无线通信模块、4g模块等部件的当前运行状态,盒体的侧部设有电源和通信接口预留孔4和tf天线预留孔,tf天线3从tf天线预留孔中穿出。
32.本实用新型提供的一种支持冗余的双链路高精度差分定位记录装置的工作过程为:
33.同时打开电台监听和打开4g有效,分别接收基站的报文,报文均发送至解算cpu进行计算处理,若双链路数据同时有效,则取最优的报文进行解算;若双链路数据并非同时有效,则通过与关系计算后,取最优报文进行解算,获取定位数据,最后以can报文的方式输出给其他数据采集主机或者自动驾驶主机。
34.本实用新型提供的一种支持冗余的双链路高精度差分定位记录装置,利用与解算cpu连接的电台无线通信模块和与微处理器mcu连接的4g模块,同时接收由电台覆盖和4g覆盖形成的冗余覆盖网络,实现无间断的厘米级高精度定位,并且定位数据解算过程由接解算cpu这一模块实现,mcu主要用于进行数据处理调度,连接结构合理,从而提高了解算效率和精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

