1.本技术涉及混凝土生产的领域,尤其是涉及一种混凝土碎渣除铁装置。
背景技术:
2.再生混凝土是指将废弃的混凝土块经过破碎、清洗、分级后,按一定比例与级配混合,部分或全部代替砂石等天然集料(主要是粗集料),再加入水泥、水等配而成的新混凝土。
3.相关技术中,公告号为cn209631397u的中国专利,公开了一种混凝土破碎回收系统,包括破碎机本体与设置在破碎机本体上的进料斗与出料斗,破碎机本体的底部设置有回收输送机,且破碎机本体的一侧安装有除尘箱与抽风泵,出料斗与除尘箱之间连通有输气管,进料斗相对立的两个侧壁面上分别固定有限位圈与限位挡块,且进料斗的内部设置有进料挡板,限位圈上活动安装有活动杆,且活动杆的外表面设置有连接块,活动杆上套接有复位弹簧,除尘箱上设置有集尘屉,且除尘箱的内部固定有滑轨。显著的提高破碎机的使用安全性,并能对破碎产生的灰尘进行清理,且自动化程度高,实用性强,适合广泛推广与使用。
4.针对上述中的相关技术,在对再生混凝土进行破碎的过程中,发明人认为存在有再生混凝土中夹杂有钢筋等铁制品,不便于破碎机进行破碎形成骨料的缺陷。
技术实现要素:
5.为了便于除去再生混凝土中存在的铁制品,本技术提供一种混凝土碎渣除铁装置。
6.本技术提供的一种混凝土碎渣除铁装置采用如下的技术方案:
7.一种混凝土碎渣除铁装置,包括机架,所述机架上设置有用于输送混凝土的皮带输送机,所述机架位于皮带输送机上方设置有电磁吸附装置,所述电磁吸附装置电连接有磁力调节组件。
8.通过采用上述技术方案,机架位于皮带输送机上安装的电磁吸附装置能够对皮带输送机输送的混凝土碎块中的铁器进行吸附,从而实现了混凝土碎块与铁器之间的分离,从而去除了再生混凝土中的铁制品。
9.优选的,所述机架位于皮带输送机一侧设置有铁器收集斗,所述机架上转动连接有转动悬臂,所述电磁吸附装置安装在转动悬臂上,所述转动悬臂顶部设置有转动轴,所述转动轴插设在机架中,所述转动轴穿出机架的一端设置有限位环板。
10.通过采用上述技术方案,机架上通过转动轴转动的转动悬臂能够以转动轴为中心转动,从而在电磁吸附装置吸附满铁器后将转动悬臂转动至铁器收集斗一侧,然后通过磁力调节装置断电实现铁器在重力作用下自然掉落进铁器收集斗中,从而完成了对铁器的收集。
11.优选的,所述磁力调节组件包括供电电源和控制供电电源工作的控制装置,所述
电磁吸附装置电连接于供电电源;所述机架上位于铁器收集斗一侧设置有用于检测转动悬臂转动至铁器收集斗顶部的光电检测装置,所述光电检测装置连接于控制装置以控制供电电源断电。
12.通过采用上述技术方案,控制装置控制的供电电源能够自由调节电磁吸附装置的磁力大小;而光电检测装置的设置对转动悬臂是否转动到位进行检测,控制装置在光电检测装置检测到转动悬臂时控制供电电源断电,从而实现了对铁器的自动出料收集。
13.优选的,所述机架位于限位环板一侧设置有支撑板,所述支撑板上安装有用于驱动限位环板转动的驱动电机。
14.通过采用上述技术方案,驱动电机的设置能够驱动限位环板转动,从而带动了转动悬臂转动,从而实现了转动悬臂的自动转动,从而无需操作人员手动转动。
15.优选的,所述转动悬臂上安装有称量装置,所述称量装置连接于控制装置,所述驱动电机连接于控制装置以受控于控制装置在转动悬臂上的重量超过预设值时启动驱动电机进行转动。
16.通过采用上述技术方案,称量装置的设置便于对电磁吸附装置上吸附的铁器重量进行检测,控制装置在检测所得数据超过预设值时控制驱动电机转动,从而实现了对铁器的自动收集,不致电磁吸附装置上吸附的铁器过多而无法吸附铁器的问题;同时也能够实现对铁器的自动收集。
17.优选的,所述皮带输送机一端设置有驱动皮带输送机工作的输送电机,所述输送电机连接于控制装置以在转动悬臂转动时控制皮带输送机停止。
18.通过采用上述技术方案,输送电机能够驱动皮带输送机转动对混凝土碎块进行输送,而输送电机连接于控制装置使得控制装置能够控制输送电机在转动悬臂转动时停止,从而减少了转动悬臂转动时铁器的遗漏。
19.优选的,所述机架一侧设置有固定板,所述铁器收集斗朝向机架的一侧设置有限位板,所述固定板和限位板中共同穿设有定位杆,所述定位杆端部设置有限位块。
20.通过采用上述技术方案,固定板和限位板中共同插设的定位杆能够对铁器收集斗的位置进行固定,而限位块的设置能够将定位杆固定在固定板中,从而减轻了铁器收集斗在收集铁器时发生的位移。
21.优选的,所述机架位于固定板上方设置有导料斗,所述导料斗设置有将铁器导入铁器收集斗中的导向面。
22.通过采用上述技术方案,导料斗和导向面的设置便于将铁器引导入铁器收集斗中,从而便于对铁器进行收集。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过采用机架、皮带输送机、电磁吸附装置和磁力调节组件相配合的技术,从而便于对混凝土碎块中的铁器进行吸附除去;
25.2.通过采用转动悬臂、转动轴、限位环板、控制装置、供电电源、光电检测装置、支撑板、驱动电机、称量装置和输送电机相配合的技术,从而便于自动将收集后的铁器进行转移;
26.3.通过采用铁器收集斗、固定板、限位板、定位杆、限位块、导料斗和导向面相配合的技术,从而便于对铁器进行收集转移。
附图说明
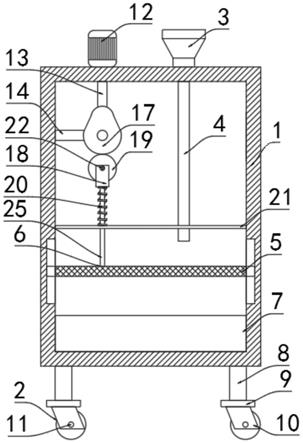
27.图1是本技术实施例中一种混凝土碎渣除铁装置的主体结构示意图;
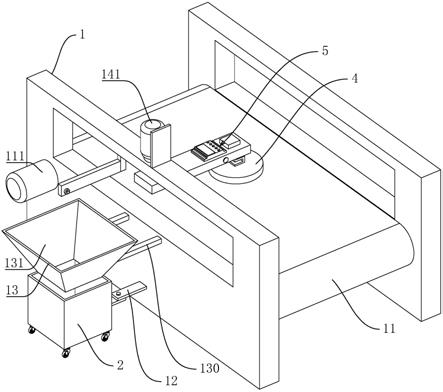
28.图2是本技术实施例中铁器收集斗处结构的爆炸示意图;
29.图3是本技术实施例中转动轴处结构的爆炸示意图。
30.附图标记说明:1、机架;11、皮带输送机;111、输送电机;12、固定板;13、导料斗;130、支撑杆;131、导向面;14、支撑板;141、驱动电机;15、光电检测装置;151、检测板;2、铁器收集斗;21、限位板;22、定位杆;221、限位块;3、转动轴;31、转动悬臂;311、称量装置;312、反光板;32、限位环板;321、轴承;4、电磁吸附装置;5、磁力调节组件;51、供电电源;52、控制装置。
具体实施方式
31.以下结合附图1
‑
3对本技术作进一步详细说明。
32.本技术实施例公开一种混凝土碎渣除铁装置。参照图1,混凝土碎渣除铁装置包括机架1,机架1上安装有用于输送混凝土的皮带输送机11,皮带输送机11用于输送待除铁的混凝土碎块。皮带输送机11一端插设有驱动皮带输送机11工作的输送电机111,输送电机111可以为伺服电机,输送电机111安装在机架1上。
33.参照图1和图2,机架1一侧焊接固定有固定板12,机架1位于皮带输送机11一侧安装有铁器收集斗2,铁器收集斗2朝向机架1的一侧焊接固定有限位板21。固定板12和限位板21中共同穿设有定位杆22,定位杆22可以为端面为正三角形的三棱柱,定位杆22沿竖直方向插设在固定板12和限位板21中。定位杆22端部一体成型有限位块221,限位块221与固定板12相抵,从而保持在固定板12中。
34.参照图1和图2,机架1位于固定板12上方焊接固定有支撑杆130,支撑杆130远离机架1的一端焊接固定有导料斗13,导料斗13设有将铁器导入铁器收集斗2中的导向面131,导向面131使得导流斗为锥型。
35.参照图1和图3,机架1一侧中部顶壁插设有转动轴3,转动轴3底部焊接有转动悬臂31。转动悬臂31底壁上通过螺栓安装有称量装置311,称量装置311可以为称量传感器。称量装置311底部通过螺栓安装有电磁吸附装置4,电磁吸附装置4为电磁铁。电磁吸附装置4位于皮带输送机11的中部上方,以对皮带输送机11上输送的混凝土碎块中的铁器进行吸附。
36.参照图1和图3,电磁吸附装置4电连接有磁力调节组件5,磁力调节组件5包括供电电源51和控制供电电源51工作的控制装置52。电磁吸附装置4电连接于供电电源51,供电电源51连接于控制装置52以受控于控制装置52。供电电源51为恒压电源,用于输出恒定电压的电流且电流大小可调。控制装置52可以为plc控制器,供电电源51和控制装置52均通过螺栓安装在转动悬臂31的顶壁上。
37.参照图1和图3,转动轴3穿出机架1的一端焊接固定有限位环板32,限位环板32与机架1之间焊接固定有轴承321,轴承321的外圈焊接固定在机架1上。机架1位于限位环板32一侧焊接固定有支撑板14,支撑板14上通过螺栓安装有用于驱动限位环板32转动的驱动电机141,驱动电机141的输出轴插设在转动轴3中。
38.驱动电机141可以为步进电机,驱动电机141连接于控制装置52。称量传感器电连接于控制装置52,控制装置52在称量传感器检测所得示数超过预设值时控制驱动电机141
转动180
°
,以控制进行出料。控制装置52连接于输送电机111,控制装置52在转动悬臂31转动时控制输送电机111停止输送。
39.机架1上位于铁器收集斗2一侧焊接固定有检测板151,检测板151的表面上通过螺栓安装呕用于检测转动悬臂31转动至铁器收集斗2顶部的光电检测装置15,光电检测装置15可以为光电传感器。转动悬臂31远离光电检测装置15的一侧表面粘接固定有反光板312。光电检测装置15连接于控制装置52,转动悬臂31转动180
°
时,光电传感器发出的光线恰好经过反光板312发射回光电传感器,此时控制装置52控制供电电源51断电,铁器在重力的作用下经导向面131导向掉落进铁器收集斗2中。
40.本技术实施例一种混凝土碎渣除铁装置的实施原理为:
41.在皮带输送机11输送的过程中,电磁吸附装置4不断对皮带输送机11上输送的混凝土碎块中的铁器进行吸附,铁器被吸附在电磁吸附装置4的表面上,从而实现了对混凝土碎块的除铁。
42.在电磁吸附装置4吸附的过程中,称量装置311不断对电磁吸附装置4进行称量并将数据传输给控制装置52。控制装置52在称量装置311称量数据不断升高时控制供电电源51提高电流值,从而提高电磁吸附装置4的吸引力。控制装置52在称量装置311称量所得数据超过预设值时控制输送电机111停止输送,并控制强度电机转动180
°
。在转动180
°
时,光电检测装置15发出的光线恰好被转动悬臂31上的反光板312发射回光电检测装置15,此时光电检测装置15将信号传输给控制装置52,控制装置52控制供电电源51断电。电磁吸附装置4在供电电源51断电后失去磁性,电磁吸附装置4上吸附的铁器在重力作用下经导料斗13的作用下掉落至铁器收集斗2中进行收集。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。