1.本公开涉及机器人的不透流体密封,并且尤其涉及机器人关节的密封。本公开还涉及一种包括至少一个密封关节的机器人。
背景技术:
2.用于蛋白质食品加工工业(即肉、家禽、鱼、海产食品和奶制品)的设备有严格的卫生要求限制,并且必须每天使用高压热水和化学试剂清洗。在食品加工中用于冲洗应用的机器人应当优选具有完整的不锈钢壳体或框架,其在卫生方面被设计为易于清洁。机器人需要具有高防水等级——进入防护(ingress protection)69k(ip69k)。ip69k等级定义了防止灰尘和高温高压水进入所需要提供的条件——使得符合该标准的产品适用于必须对设备进行严格消毒的情况。在诸如食品加工的工业中,卫生和清洁是至关重要的,设备必须能够承受严格的高压、高温冲洗程序。在可能面临灰尘和污垢问题的许多工业中,重要的是确保灰尘和污垢不能穿透机器人的壳体并导致其失效。
3.即使机器人设置有不锈钢壳体,关节也可能会成为污染源。通常,机器人内部设置有旋转密封件,用于密封电机和齿轮。然而,在冲洗环境下,机器人中未被密封的其它部分可能会遭受来自内部的严重腐蚀。当来自例如食品加工的冲洗流体(例如酸性、碱性或氯化液体)和其它材料进入机器人内部时,会加速机器人的腐蚀。因此,应当对机器人的关节进行密封,使得在工作或冲洗期间没有流体或材料能够进入关节。
4.从《食品工业低成本机器人设计指南》,rene j.moreno masey等,2010年,工业机器人:国际期刊,第37卷第6期,第509
‑
517页(“guidelines for the design of low
‑
cost robots for the food industry”)中可以知道,提供具有不锈钢材料的机器人。该文献中描述了使用弹簧赋能ptfe面密封件来密封机器人关节,但没有详细描述如何实现密封。
技术实现要素:
5.本公开的一个目的在于缓解现有技术中的至少一些缺点。本公开的另一目的在于提供一种具有密封件且密封件被设计为用于卫生环境的机器人关节。另一目的在于提供一种具有密封件且密封件稳固地承受外部压力的机器人关节。另一目的在于提供一种具有耐用密封件的机器人关节。另一目的在于提供一种成本相对较低的机器人密封装置。
6.根据第一方面,本公开涉及一种机器人关节,包括:第一机器人部件和第二机器人部件,第一机器人部件和第二机器人部件被布置为在两者之间具有相对移动,关节间隙,用于将第一机器人部件和第二机器人部件彼此分开;以及密封装置,用于密封关节间隙以抵抗外部冲击。密封装置包括:第一侧元件,第一侧元件是第一机器人部件的一部分并且相对于第一机器人部件是固定不动的;以及间隙元件,间隙元件延伸跨过关节间隙。第一侧元件和间隙元件中的一个包括第一表面,第一表面由食品级材料制成,并且第一侧元件和间隙元件中的另一个包括第一密封元件,第一密封元件被配置为与第一表面滑动接触。
7.第一方面提供了一种机器人关节的密封件,该密封件被设计为用于卫生环境,因
为密封件上设置有食品级材料表面,该表面为密封元件的接触表面。食品级材料是被视为能够与食品安全接触的材料,即不以对人体有害或可能有害的物质污染食品的材料。同样,术语如“食品接触材料”和“卫生材料”均用于指代食品级材料。如果什么材料应该被认为是食品级材料不是显而易见的,则应参考美国食品和药品管理局(fda)的指示。
8.在一些实施例中,第一侧元件与第一机器人部件一体形成。由于第一机器人部件的外表面也需要由食品级材料制成,所以第一表面可以通过局部处理(例如硬化和/或抛光)第一机器人部件来提供,以实现用于密封元件的适当接触表面。该解决方案意味着第一侧元件包括第一表面,并且间隙元件包括第一密封元件。
9.在一些实施例中,第一机器人部件包括第一机器人接口,第一机器人接口被配置为容纳第一侧元件。考虑到第一侧元件包括第一表面(并且间隙元件包括第一密封元件)的解决方案,因为第一机器人部件的局部处理可能比较昂贵,所以可能有利的是将包括第一表面的第一侧元件提供为单独插入件并将其配置为固定地附接至第一机器人接口。考虑到第一侧元件包括第一密封元件的解决方案,一个非常明显的替代方案是为第一机器人部件提供固定地容纳第一侧元件的接口。
10.在一些实施例中,密封装置包括第二侧元件,第二侧元件是第二机器人部件的一部分并且相对于第二机器人部件是固定不动的,第二侧元件和间隙元件中的一个包括第二表面,第二表面由食品级材料制成,并且第二侧元件和间隙元件中的另一个包括第二密封元件,该第二密封元件被配置为与第二表面滑动接触。通过提供具有两个接口滑动接触而非一个接口的密封装置,相应的密封元件和表面之间的速度可以降低一半。
11.在一些实施例中,第二侧元件与第二机器人部件一体形成。
12.在一些实施例中,第二机器人部件包括第二机器人接口,第二机器人接口被配置为容纳第二侧元件。
13.在一些实施例中,第一机器人部件包括部分地容纳间隙元件的第一凹部。
14.在一些实施例中,第二机器人部件包括部分地容纳间隙元件的第二凹部。
15.在一些实施例中,第一侧元件包括第一表面,并且间隙元件包括第一密封元件。
16.在一些实施例中,第二侧元件包括第二表面,并且间隙元件包括第二密封元件。
17.在一些实施例中,间隙元件包括第一表面,并且第一侧元件包括第一密封元件。
18.在一些实施例中,间隙元件包括第二表面,第二表面由食品级材料制成,并且第二侧元件包括第二密封元件。
19.在一些实施例中,食品级材料包括硬化(hardened)不锈钢。
20.在一些实施例中,第一表面和/或第二表面的表面硬度为至少800hv0.05,诸如至少1000hv0.05、至少1200hv0.05或至少1400hv0.05。
21.在一些实施例中,第一表面和/或第二表面具有以ra值表示的至多0.8μm的表面粗糙度,诸如至多0.6μm、至多0.4μm或至多0.2μm。
22.在一些实施例中,激励机构被配置为增加第一表面与第一密封元件之间的接触压力。
23.在一些实施例中,激励机构集成在间隙元件中。
附图说明
24.图1a示出机器人的侧视图,其中,机器人包括多个关节。
25.图1b示出图1a的机器人的后视图。
26.图2示出叉式机器人的后视图,其中,机器人包括多个关节。
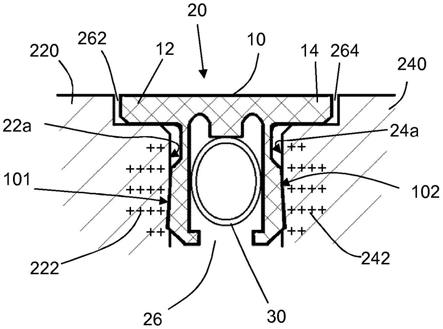
27.图3示出当设置在机器人关节中时,根据第一实施例的面密封件的横截面。
28.图4示出当设置在机器人关节中时,根据第二实施例的面密封件的横截面。
29.图5示出根据一些实施例,设置有面密封件和非一体式侧元件的机器人关节的横截面。
30.图6示出图5所示的面密封件和非一体式侧元件的一个横截面放大图。
31.图7示出当设置在机器人关节中时,根据第三实施例的面密封件的横截面。
32.图8单独示出关节密封组件的横截面。
33.图9示出设置在机器人关节中时的图8的关节密封组件。
具体实施方式
34.为了管理例如用于食品设备的高卫生设计标准,本公开提出一种具有密封装置的机器人关节,该密封装置包括至少一个硬化不锈钢表面。机器人关节包括第一机器人部件和第二机器人部件,第一机器人部件和第二机器人部件被布置为在两者之间具有相对移动。根据一个实施例,布置有机器人关节的机器人设置有不锈钢壳体,以减少对机器人的腐蚀。为了允许第一机器人部件和第二机器人部件之间的相对移动,机器人关节处的不锈钢壳体中存在间隙。因此,该间隙(下称“关节间隙”)设置有满足ip69k规定的防水等级的密封装置。由于关节间隙将被有效地收紧,所以这种密封是卫生的。
35.至少一个硬化不锈钢表面通常通过硬化工艺进行硬化,并且被布置为与相应的一个或多个密封元件滑动接触。因此,至少一个硬化不锈钢表面不易磨损,并且与不锈钢的表面未硬化的情况相比,能够减小朝向面密封件的摩擦。更详细地,硬化工艺将表面硬度增加至800
‑
1500hv0.05(显微硬度,hv0.05是指例如“维氏”测试法)。因此,根据一个实施例,本文所指的硬化不锈钢具有800
‑
1500hv0.05的表面显微硬度。
36.下面将描述包括根据不同实施例的密封装置的机器人关节,以及包括一个或多个此类机器人关节的机器人。
37.首先,将参考图1
‑
2描述一些示例性机器人。图1a和图1b示出具有六个轴1
‑
6的工业机器人100,以下称为“机器人100”。机器人100是具有六个自由度(dof)的可编程机器人。每个轴包括驱动机构,用于驱动臂或腕。驱动机构包括驱动电机,例如无刷直流电机。包括减速器和/或齿轮箱的传动装置经由驱动电机的输出轴将扭矩从驱动电机传输至轴的关节20。关节20包括第一机器人部件220和第二机器人部件240(图5)。第一机器人部件220通常相对于轴的驱动电机固定布置,而第二机器人部件240被布置为与臂或腕一起相对于驱动电机旋转。因此,在操作关节时,第二机器人部件240将相对于第一机器人部件220旋转。因此,第一机器人部件220和第二机器人部件240能够相对于彼此旋转。第一机器人部件220和第二机器人部件240之间存在关节间隙26(图4),并且布置面密封件10形式的间隙元件以密封关节间隙26。因此,面密封件10被布置为密封第一机器人部件220和第二机器人部件240。在图1a和图1b的机器人100中,每个关节20a、20b、20c、20d、20e、20f用相应的面密封件10a、
10b、10c、10d、10e、10f密封。应当理解的是,机器人可以包括多于或少于六个关节,并且因此包括多于或少于六个面密封件。还应当理解的是,面密封件的数量可以少于关节的数量,即不是每个关节都需要包括面密封件。
38.图2示出具有叉形结构的机器人200,也称“叉式机器人”。叉式机器人200包含的部分基本上与图1a
‑
图1b中的机器人100相同,只是具有由两个关节20b1、20b2组成的双第二轴2、由两个关节20c1、20c2组成的双第三轴3,以及连接对应的双第二轴2和双第三轴3的双连杆。与图1a
‑
图1b中的机器人100相比,叉式机器人200可以具有增强的稳定性。双第二轴2中的每个关节20b1、20b2可以分别由单独的驱动机构驱动。双第三轴3中的每个关节20c1、20c2可以分别由单独的驱动机构驱动。每个关节20b1、20b2、20c1、20c2用相应的面密封件10b1、10b2、10c1、10c2密封。然而,应当理解的是,这里面密封件的数量也可以少于关节的数量,即不是每个关节都需要包括面密封件。
39.图3示出当设置在机器人关节20中时,根据第一实施例的面密封件10的横截面。机器人关节20可以是本文所述的任何机器人关节。机器人关节20的第一机器人部件220限定第一硬化不锈钢表面,第一硬化不锈钢表面为限定关节间隙26的第一内面22a的形式。机器人关节20的第二机器人部件240限定第二硬化不锈钢表面,第二硬化不锈钢表面为限定关节间隙26的第二内面24a的形式。内面22a、24a通常是径向面,因而从轴的电机轴沿径向延伸。在一个实施例中,第一机器人部件220包括通过硬化工艺硬化以构成第一侧元件222的区域。然后,包括第一内面22a的第一侧元件222与第一机器人部件220一体形成。在另一实施例中,第一机器人部件220包括第一机器人接口221(图6),第一机器人接口221被配置为容纳第一侧元件222,如稍后将参考图5
‑
图6所描述的。然后,包括第一内面22a的第一侧元件222不与第一机器人部件220一体形成。在一个实施例中,第二机器人部件240还包括通过硬化工艺硬化以构成第二侧元件242的区域。然后,包括第二内面24a的第二侧元件242与第二机器人部件240一体形成。在另一实施例中,第二机器人部件240包括第二机器人接口241(图6),第二机器人接口241被配置为容纳第二侧元件242,如稍后将参考图5
‑
图6所描述的。然后,包括第二内面24a的第二侧元件242不与第二机器人部件240一体形成。
40.根据第一实施例的面密封件10包括环形主体,环形主体被设计为具有带凸缘的径向护套。在横截面中,可以看到面密封件10具有大致“t”形形状,其中,“t”的水平腿形成第一和第二凸缘部分12、14,并且竖直腿被分成形成径向护套的两个腿。“t”的上侧构成面密封件10的外侧,并且被设计为面向机器人100、200的外部。面密封件10具有第一密封面101和第二密封面102形式的两个动态密封元件,即“t”形径向护套的外侧。第一密封面101被布置为与第一机器人部件220的第一内面22a滑动接触。第二密封面102被布置为与第二机器人部件240的第二内面24a滑动接触。
41.为了将面密封件10保持在关节间隙26中的适当位置,并确保面密封件10在受到外部压力时不会被推入关节间隙26中,第一机器人部件220设置有第一凹部262,用于容纳第一凸缘部件12。换句话说,关节间隙26在第一机器人部件220中限定朝向机器人关节20外部的第一凹部262,并且面密封件10部分地容纳在第一凹部262中。这里,第二机器人部件240设置有第二凹部264,用于容纳第二凸缘部件14。换句话说,关节间隙26在第二机器人部件240中限定朝向机器人关节20外部的第二凹部264,并且面密封件10部分地容纳在第二凹部264中。在备选实施例中,关节20仅包括第一凹部262,第一凹部262被布置为仅容纳不包括
第二凸缘部件14的相应的面密封件10的第一凸缘部件12。第一凹部262和第二凹部264的轴向尺寸可以略大于第一凸缘部分12和第二凸缘部分14,从而允许第一凸缘部分和第二凸缘部分被外部压力轻微压缩并轴向膨胀。
42.为了确保面密封件10以紧密配合的方式保持在关节间隙26中,面密封件10包括激励机构30,激励机构30被配置为增加面密封件10与第一机器人部件220之间的接触压力。这里,激励机构30被配置为还增加面密封件10与第二机器人部件240之间的接触压力。激励机构例如是布置在径向护套中的弹簧元件或弹性管。激励机构30与护套的内侧接触,将第一密封面101推向第一机器人部件220的第一内面22a,并且将第二密封面102推向第二机器人部件240的第二内面24a。
43.图4示出当设置在机器人关节20中时,根据第二实施例的面密封件10的横截面。机器人关节20可以是本文所述的任何机器人关节。与图3相同的附图标记表示对应的相同特征,在此不再赘述。根据第二实施例的面密封件10一般具有与根据第一实施例的面密封件10相同的功能。然而,在该实施例中,第一凹部262和第二凹部264被成形为当面密封件10暴露于抵靠面密封件10的外侧施加的外部压力时,允许面密封件以成角度的方式膨胀至第一凹部262和第二凹部264中。此外,激励机构30具有“v”形横截面。激励机构30至少部分地布置在面密封件的护套内,其中,“v”的上部抵靠面密封件10的与外侧相对的内侧。“v”的外侧与护套的内侧接触,将第一密封面101推向第一机器人部件220的第一内面22a,并且将第二密封面102推向第二机器人部件240的第二内面24a。当压力施加在面密封件10的外侧上时,面密封件10将被推入第一凹部262和第二凹部264中,增加接触压力和接触表面的面积,从而使密封更加牢固。
44.面密封件10应当由符合fda要求的材料制成。例如,面密封件10可以由具有批准添加剂的聚四氟乙烯(ptfe)基材料制成,或者由具有批准添加剂的超高分子量聚乙烯(uhmwpe)基材料制成。
45.图5示出示例性机器人关节20的横截面,这里是机器人100、200的第二机器人关节20b、20b1,其上设置有面密封件10。
46.在该示例性实施例中,机器人关节20的第一机器人部件220包括第一机器人接口221和不与第一机器人部件220一体形成的第一侧元件222。这里,第一机器人接口221是关节20的固定部件。第一机器人接口221包括对应轴的固定部件的第一壳体的部分或整个第一壳体。如图5所示,第一壳体中布置有驱动机构,包括电机223,用于驱动布置到传动装置225的驱动轴。电机223和传动装置225之间存在油224。机器人关节20的第二机器人部件240包括第二机器人接口241和不与第二机器人部件240一体形成的第二侧元件242。这里,第二机器人接口241是旋转部件。第二机器人接口241随着驱动轴围绕轴2的旋转运动而旋转。第二机器人接口241包括对应轴的旋转部件的第二壳体的部分或整个第二壳体。第二壳体连接至齿轮箱225。旋转部件包括盖243,用于关闭旋转部件。
47.从图中可以理解,面密封件10是环形的,并且被布置为朝机器人的外部密封机器人关节20。面密封件10的(一个或多个)外侧可以与机器人关节20的外侧对准,机器人关节的外侧紧邻关节间隙26。
48.现在参考图6,图中示出图5所示的面密封件10以及第一和第二侧元件222、242的一个横截面的放大图。如图5中已经示出的,面密封件10与第一机器人接口221和第二机器
人接口241之间分别设置有第一和第二侧元件222、242。面密封件10可以同心地布置在第一侧元件222与第二侧元件242之间。备选地,机器人关节20可以仅包括第一和第二侧元件222、242中的一个。此时,在不包括侧元件222、242的侧面,面密封件10与第一机器人接口221或第二机器人接口241直接接触。
49.面密封件10、第一侧元件222和/或第二侧元件242可以被称为密封装置。第一侧元件222布置在第一机器人接口221和面密封件10之间。因此,第一侧元件222被设计为桥接第一机器人接口221和面密封件10。第一侧元件222包括环形主体。第一侧元件222具有第一内面22a。第一内面22a是硬化不锈钢表面。面密封件10被布置为使得面密封件10的第一密封面101与第一内面22a滑动接触。第一侧元件222还包括第一外表面22b,第一外表面22b被布置为附接至第一机器人接口221。第一侧元件222还具有面向机器人关节20外部的外侧。第一侧元件222通过第一螺栓62附接至第一机器人接口221。
50.第二侧元件242布置在第二机器人接口241与面密封件10之间。因此,第二侧元件242被设计为桥接第二机器人接口241和面密封件10。第二侧元件242包括环形主体。第二侧元件242具有第二内面24a。第二内面24a是硬化不锈钢表面。面密封件10被布置为使得面密封件10的第二密封面102与第二内面24a滑动接触。第二侧元件242还包括第二外表面24b,第二外表面24b被布置为附接至第二机器人接口241。第一侧元件222还具有面向机器人关节20外部的外侧。第二侧元件242通过第二螺栓64附接至第二机器人接口241。
51.由于具有硬化不锈钢表面的第一和第二侧元件222、242不与第一机器人部件220一体形成,可以降低成本。这是因为硬化通常是按照应当硬化的重量逐千克交付的,并且非一体形成的第一和第二侧元件222、242的重量低于第一机器人接口221和第二机器人接口241的重量。因此,第一和第二侧元件222、242非一体形成的一个目的在于减少待硬化不锈钢材料的量。
52.第一外表面22b具有多个第一切口55,例如环形切口,研磨颗粒等可以收集在这些切口中。第二外表面24b具有多个第二切口56,例如环形切口,研磨颗粒等可以收集在这些切口中。备选地,第一外表面22b和/或第二外表面24b可以分别仅具有一个环形切口。
53.图7示出设置有根据第三实施例的面密封件10的机器人关节20的横截面。机器人关节20与前述实施例的不同之处在于,其仅在关节间隙26一侧具有动态密封元件。如在其它实施例中一样,第一机器人部件220限定限制关节间隙26的第一内面22a,并且第一内面22a是硬化不锈钢表面。面密封件10布置在关节间隙26中以密封关节间隙26,其中,面密封件10包括第一密封面101,第一密封面101被布置为与第一机器人部件220的第一内面22a滑动接触。第一密封面101具有第三切口11,例如环形切口,研磨颗粒等可以收集在该切口中。面密封件10例如通过第三螺栓247紧固或结合至第二机器人部件240。
54.图8示出根据一些实施例的关节密封组件40形式的间隙元件的横截面。关节密封组件40用于设置在根据图9的机器人关节20的关节间隙26中。关节密封组件40包括第一环形插入体41、第二环形插入体42和环形结合元件43。环形结合元件43同心地插入第一环形插入体41和第二环形插入体42之间。环形结合元件43还结合至第一环形插入体41和第二环形插入体42。第一环形插入体41包括第一凸缘411。第二环形插入体42包括第二凸缘421。第一环形插入体41和第二环形插入体42由硬化不锈钢制成。环形结合元件43例如由ptfe或uhmwpe制成。
55.图9示出图8的关节密封组件40布置在机器人关节20中的横截面。机器人关节20包括第一机器人接口221和第二机器人接口241,第一机器人接口221和第二机器人接口241被布置为在两者之间具有相对移动。关节间隙26将第一机器人接口221和第二机器人接口241彼此分开。在图8中,关节间隙26中设置有关节密封组件40。
56.如图9所示,第一机器人接口221设置有凹部,用于容纳第一橡胶垫圈52形式的第一密封元件,在该实施例中,第一橡胶垫圈52构成第一侧元件222。第一环形插入体41上设置有容纳在第一橡胶垫圈52中的第一凸缘411,以在第一环形插入体41和第一橡胶垫圈52之间提供滑动接触。
57.第二机器人接口241设置有凹部,用于容纳第二橡胶垫圈54形式的第二密封元件,在该实施例中,第二橡胶垫圈54构成第二侧元件242。第二环形插入体42上设置有容纳在第二橡胶垫圈54中的第二凸缘421,以在第二环形插入体42和第二橡胶垫圈54之间提供滑动接触。
58.关节密封组件40可以降低组装的复杂性。关节密封组件40具有相当简单的设计,因而可以降低制造成本。由于在被机器人制造商接收之前已经完成组装,该解决方案可以节省物流和存储成本。紧凑的密封结构提供了良好的密封性能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
