1.本发明涉及关节灵敏度训练的技术领域,尤其涉及一种关节灵敏度协调的训练装置。
背景技术:
2.现有医院在对残疾人士进行康复训练时,通常会使用到一些装置进行辅助,其中关节灵敏度协调的训练装置是医院中专门用于进行手臂关节恢复训练的辅助装置;
3.现有训练装置在使用时仍存在以下不足:
4.1、现有装置在进行患者手臂的固定时,为便于手肘关节的转动,通常只对患者的大臂或小臂进行固定,此种方式固定效果不佳,在进行训练时易发生脱落;
5.2、现有装置在使用时需要护士在旁进行辅助转动,方可进行患者手肘关节的转动,较为费时费力,且无法调节手肘关节转动的次数与转动的角度,具有一定的局限性;
6.因此亟需设计一种关节灵敏度协调的训练装置来解决上述问题。
技术实现要素:
7.本发明的目的是为了解决现有技术中存在的问题,而提出的一种关节灵敏度协调的训练装置。
8.为了实现上述目的,本发明采用了如下技术方案:
9.一种关节灵敏度协调的训练装置,包括底板,所述底板上固定安装有横向放置板,所述横向放置板上通过两个卡合机构安装有两个伸缩带,所述底板内通过转辊转动安装有转向放置板,所述转向放置板上通过多个支撑杆固定安装有固定板,所述固定板上螺纹安装有螺纹杆,且螺纹杆与固定板之间通过限位机构安装有弧形按压板,所述转向放置板上安装有紧握机构;
10.所述底板内固定安装有减速电机,且减速电机的驱动端与底板之间通过转杆转动安装有不完全齿轮,所述底板内通过滑动机构安装有移动块,且移动块上固定安装有与不完全齿轮相配合的推移齿杆,所述转向放置板上通过限位槽与限位块的配合滑动安装有滑动板,且滑动板与移动块之间通过多个减震机构安装有多个减震弹簧杆,所述移动块与底板之间安装有复位机构。
11.在上述的一种关节灵敏度协调的训练装置中,所述卡合机构包括固定安装在底板上的固定块,且伸缩带的一端固定安装在固定块上,所述伸缩带的另一端固定安装有卡合扣,且底板上固定安装有与卡合扣相配合的卡合块。
12.在上述的一种关节灵敏度协调的训练装置中,所述限位机构包括固定安装在螺纹杆下部的限位转轴,且弧形按压板转动安装在限位转轴上,所述弧形按压板与固定板之间固定安装有两个限位弹簧。
13.在上述的一种关节灵敏度协调的训练装置中,所述螺纹杆上远离限位转轴的一端固定安装有控制把,所述弧形按压板上固定安装有海绵垫,所述底板内固定安装有弹性海
绵柱,且弹性海绵柱位于横向放置板与转向放置板之间。
14.在上述的一种关节灵敏度协调的训练装置中,所述紧握机构包括固定安装在转向放置板上的两个伸缩杆,两个所述伸缩杆上均固定安装有辊杆,且两个辊杆之间固定安装有弹力球。
15.在上述的一种关节灵敏度协调的训练装置中,所述滑动机构包括固定安装在移动块上的梯形滑块,所述底板上开设有梯形滑槽,且梯形滑块卡合安装在梯形滑槽内。
16.在上述的一种关节灵敏度协调的训练装置中,所述减震机构包括固定安装在滑动板与移动块上的两个支撑柱,且减震弹簧杆的上下端分别滑动安装在两个支撑柱内,所述减震弹簧杆的上下两端均固定安装有减震板,两个所述支撑柱内均固定安装有两个固定框,且每个减震板与相应固定框之间均固定安装有两个压缩弹簧,两个所述减震板与相应固定框之间均安装有反力结构。
17.在上述的一种关节灵敏度协调的训练装置中,所述反力结构包括转动安装在减震板端部的摩擦滚球,所述固定框内固定安装有橡胶垫,且摩擦滚球与橡胶垫相贴合。
18.在上述的一种关节灵敏度协调的训练装置中,所述复位机构包括固定安装在底板内的定位板,且定位板与移动块之间固定安装有多个复位弹簧。
19.与现有的技术相比,本发明优点在于:
20.1:通过设置伸缩带,在进行康复训练时,患者的大臂放置在横向放置板上,再拉动两个伸缩带分别将患者大臂的两端进行定位,即可对患者的大臂进行稳定的固定。
21.2:通过设置弧形按压板,当患者的大臂固定完毕后,即可将患者的小臂放置在转向放置板上,再转动螺纹杆使其带动弧形按压板下降并与患者小臂的端部相挤压,即可将患者的小臂进行固定,使患者在进行康复训练时手臂不会发生晃动。
22.3:通过设置减速电机与复位弹簧,减速电机转动会带动其上的不完全齿轮转动,不完全齿轮转动时会在推移齿杆与复位弹簧的配合作用下带动移动块在底板内进行往复移动,以便于进行后续的关节恢复训练。
23.4:通过设置支撑柱、滑动板,当移动块进行往复移动时,即会带动支撑柱并使其上的滑动板在转向放置板的底部滑动,由于支撑柱、减震弹簧杆的高度相对固定,使得支撑柱在移动时即会使转向放置板以转辊为轴进行正反向往复转动,即可带动患者的手肘部位关节进行往复转动,即进行手肘关节的恢复训练。
24.综上所述,本发明能够将患者的大臂与小臂进行分别定位固定,使患者在进行恢复训练时手臂不会发生脱落,且无需外部辅助即可带动患者手肘关节进行往复转动,效率更高,恢复训练的效果更佳。
附图说明
25.下面结合附图对本发明的具体实施方式作进一步详细的说明,其中:
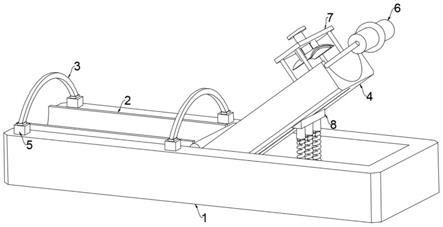
26.图1为本发明提出的一种关节灵敏度协调的训练装置的结构示意图;
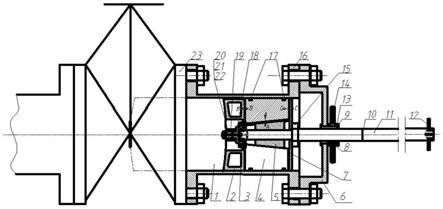
27.图2为图1中底板、横向放置板与二者之间部分连接结构的放大图;
28.图3为图1中底板、转向放置板与二者之间部分连接结构的放大图;
29.图4为图3中转向放置板与其上部分连接结构的具体结构示意图;
30.图5为图4中减速电机、移动块与其上部分连接结构的放大图;
31.图6为图3中伸缩杆、辊杆与其上连接结构的放大图;
32.图7为图4中固定板与其上部分连接结构的放大图;
33.图8为图5中减震弹簧杆、两个支撑柱的连接关系剖视图;
34.图9为图8中a部位的节点放大图。
35.图中:1底板、2横向放置板、3伸缩带、4转向放置板、5固定块、6辊杆、7固定板、8滑动板、9卡合块、10弹性海绵柱、11转辊、12伸缩杆、13减速电机、14转杆、15不完全齿轮、16推移齿杆、17移动块、18减震弹簧杆、19定位板、20复位弹簧、21弹力球、22螺纹杆、23支撑杆、24限位转轴、25限位弹簧、26弧形按压板、27海绵垫、28支撑柱、29减震板、30固定框、31压缩弹簧、32摩擦滚球、33橡胶垫。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.参照图1
‑
2,一种关节灵敏度协调的训练装置,包括底板1,底板1上固定安装有横向放置板2,横向放置板2上通过两个卡合机构安装有两个伸缩带3;
38.上述值得注意的有以下两点:
39.1、在进行康复训练时,先将患者的大臂放置在横向放置板2上,再拉动两个伸缩带3分别将患者大臂的两端进行定位,即可对患者的大臂进行稳定的固定,使其不会发生移动。
40.2、卡合机构包括固定安装在底板1上的固定块5,且伸缩带3的一端固定安装在固定块5上,伸缩带3的另一端固定安装有卡合扣,且底板1上固定安装有与卡合扣相配合的卡合块9,将伸缩带3从固定块5内拉出,并使伸缩带3覆盖患者大臂,再将伸缩带3上的卡合扣与卡合块9卡合,即可将患者的大臂进行固定。
41.参照图3
‑
4、图7,底板1内通过转辊11转动安装有转向放置板4,转向放置板4上通过多个支撑杆23固定安装有固定板7,固定板7上螺纹安装有螺纹杆22,且螺纹杆22与固定板7之间通过限位机构安装有弧形按压板26;
42.上述值得注意的有以下几点:
43.1、当患者的大臂固定完毕后,即可将患者的小臂放置在转向放置板4上,再转动螺纹杆22使其带动弧形按压板26下降并与患者小臂的端部相挤压,即可将患者的小臂进行固定,使患者在进行康复训练时手臂不会发生晃动。
44.2、限位机构包括固定安装在螺纹杆22下部的限位转轴24,且弧形按压板26转动安装在限位转轴24上,弧形按压板26与固定板7之间固定安装有两个限位弹簧25,限位机构起到限位的作用,用于使当螺纹杆22在固定板7内旋进时,弧形按压板26只会进行上下移动,而不会随螺纹杆22的转动而转动。
45.3、螺纹杆22上远离限位转轴24的一端固定安装有控制把,操作人员可握住控制把带动螺纹杆22进行转动,更为方便省事。
46.4、弧形按压板26上固定安装有海绵垫27,海绵垫27起到保护患者手臂的作用,提
高患者的使用舒适度。
47.参照图3
‑
6、图8
‑
9,底板1内固定安装有减速电机13,且减速电机13的驱动端与底板1之间通过转杆14转动安装有不完全齿轮15,底板1内通过滑动机构安装有移动块17,且移动块17上固定安装有与不完全齿轮15相配合的推移齿杆16,转向放置板4上通过限位槽与限位块的配合滑动安装有滑动板8,且滑动板8与移动块17之间通过多个减震机构安装有多个减震弹簧杆18,移动块17与底板1之间安装有复位机构;
48.上述值得注意的有以下几点:
49.1、复位机构包括固定安装在底板1内的定位板19,且定位板19与移动块17之间固定安装有多个复位弹簧20,减速电机13转动会带动其上的不完全齿轮15转动,不完全齿轮15转动时即会与推移齿杆16交替啮合,当不完全齿轮15转动至与推移齿杆16啮合时,即会推动推移齿杆16与移动块17正向移动,且此时会压缩多个复位弹簧20;
50.当不完全齿轮15转动至不与推移齿杆16啮合时,此时多个复位弹簧20受力减小即会自动伸长复位,从而会推动移动块17与推移齿杆16反向移动至复位,减速电机13继续工作即会重复上述操作,即会带动移动块17在底板1内进行往复移动,以便于进行后续的关节恢复训练。
51.2、当移动块17进行往复移动时,即会带动支撑柱28并使其上的滑动板8在转向放置板4的底部滑动,由于支撑柱28、减震弹簧杆18的整体高度相对固定,使得移动块17在移动时即会使转向放置板4以转辊11为轴进行正反向往复转动,即可带动患者的手肘部位关节进行往复转动,即可进行手肘关节的恢复训练。
52.3、底板1内固定安装有弹性海绵柱10,且弹性海绵柱10位于横向放置板2与转向放置板4之间,弹性海绵柱10起到保护患者手肘的作用,增加使用的舒适度。
53.4、转向放置板4上安装有紧握机构,紧握机构包括固定安装在转向放置板4上的两个伸缩杆12,两个伸缩杆12上均固定安装有辊杆6,且两个辊杆6之间固定安装有弹力球21,在进行手肘关节恢复训练时,患者也可同时握住弹力球21进行松握,即可进行手指关节的训练。
54.5、滑动机构包括固定安装在移动块17上的梯形滑块,底板1上开设有梯形滑槽,且梯形滑块卡合安装在梯形滑槽内,滑动机构用于使移动块17只可在底板1上进行水平滑动,而不会与底板1之间发生偏移与分离。
55.6、减震机构包括固定安装在滑动板8与移动块17上的两个支撑柱28,且减震弹簧杆18的上下端分别滑动安装在两个支撑柱28内,减震弹簧杆18的上下两端均固定安装有减震板29,两个支撑柱28内均固定安装有两个固定框30,且每个减震板29与相应固定框30之间均固定安装有两个压缩弹簧31,多个压缩弹簧31与减震弹簧杆18相互作用、相互配合可将减速电机13工作时与转向放置板4转动时产生的震动进行削弱抵消,可增加本装置工作时的整体稳定性。
56.7、两个减震板29与相应固定框30之间均安装有反力结构,反力结构包括转动安装在减震板29端部的摩擦滚球32,固定框30内固定安装有橡胶垫33,且摩擦滚球32与橡胶垫33相贴合,当减震板29在支撑柱28内移动时,摩擦滚球32会在橡胶垫33相滚动摩擦,从而会产生摩擦反力,即可将多个压缩弹簧31与减震弹簧杆18产生的弹性反力进行抵消,进一步增加减震的效果。
57.进一步说明,上述固定连接,除非另有明确的规定和限定,否则应做广义理解,例如,可以是焊接,也可以是胶合,或者一体成型设置等本领域技术人员熟知的惯用手段。
58.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。