1.本发明属于车辆编队技术领域,具体涉及一种网联式车辆编队行驶方法和系统。
背景技术:
2.车路协同采用无线通信和新一代互联网等技术,全方位实施v2v(vehicle to vehicle)车车、v2i(vechile to infrainstructure)车路动态实时信息交互,并在v2n(vehicle to network)全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
3.在车路协同环境下实现车辆队列行驶可以提高道路车辆密度、增加道路容量,同时简化交通复杂度、增加交通的可靠性。车辆编队则是由车辆队列行驶派生出来的一种非常重要的车队驾驶行为,它与车辆入队、车辆离队以及车队换道等车队驾驶行为结合起来能极大提高了汽车列队的柔性与灵活性,能使汽车列队行驶的优势得到充分发挥。
4.现有用于无人驾驶的车辆编队系统和方法,其中系统中车辆之间通过v2x(vehicle to everything,车与外界信息交换)模块进行通信,车队之间的编队包括有车队查询功能、车队合并功能、车队拆分功能和车队解散功能,上述的功能通过在车辆上设置有控制模块、v2x模块、地图模块和传感器模块得以实现,具体为通过主控车队根据车队长度的需求发送车队查询、合并指令,通过具体加入的位置,进行车队中各个车辆的行驶参数调整,使得车队通过结合另一车队而形成一个新的车队,通过车队拆分实现单个车队转变为多个车队长度更小的新车队,通过车队的合并和拆分,实现在同一路线上,交通的整体调控和规划,其中,车辆的控制者可以是无人驾驶也可以是无人驾驶。本方案简单对车队之间合并、拆分和解散功能进行了描述,只是给出了上述功能实现的方法,并未提到详细的实现方式;本方案主要讲述的是车队与车队之间的功能,但没有给出车队内部车辆之间如何进行跟车。
5.现有一种基于车联网的车辆编队行驶系统和车辆行驶的控制方法,车辆通过其自身搭载的信息交互模块进行车间通信和获取编队车辆的车况信息,行驶车辆首先确认其目的地以及是否存在有目的地相同的前方车辆,确定本车是跟车行驶还是成为头车,若为跟车行驶,则向车队发出跟车行驶请求,进入编队,根据其搭载的数据处理模块将接收的信息进行分析和处理,得出本车的期望车况数据;通过自身搭载控制系统达到可以加入编队的行驶状态进入编队,并根据汽车进入编队后的行车情况,控制期望车速,保持汽车与前车的安全距离,缓解交通拥堵的情况,提高行车的安全性。本方案提供的基于车联网车辆编队系统的架构,没有给出加入车队和离开车队的具体执行过程;本方案提供的加入车队的方式过于简单,在确保车队编队安全行驶的前提下,跟车行驶是一个非常复杂的过程,需要详细展开说明。
技术实现要素:
6.本发明要解决的技术问题是:提供一种网联式车辆编队行驶方法和系统,用于输入目的地后实现编队跟车行驶的功能。
7.本发明为解决上述技术问题所采取的技术方案为:一种网联式车辆编队行驶方法,包括以下步骤:
8.s0:在车辆上安装依次连接的天线、定位模块、控制模块,以及连接控制模块的无线通信模块;
9.s1:设一个包括n辆车的车辆编队在水平面上正常行驶,第i(i=1,2,
…
,n)辆车在平面直角坐标系下的位置为(x
i
,y
i
),速度为v
i
,其中领航车的位置为(x0,y0),速度为v0;建立车辆运动学模型和跟车模型,计算车辆的期望跟车行驶状态;
10.s2:车辆编队在包括直线和弯道的多种场景中按照跟车模型正常行驶;场景包括车辆通过红绿灯路口场景,包括前方路口为红灯、领航车变道、路口红灯变为绿灯的工况;
11.s3:非编队车辆通过提出跟车需求、匹配车队、调整行驶状态加入车辆编队;
12.s4:车辆在编队行驶的过程中,周期性的计算本车的当前位置与目的地的行驶距离;当行驶距离小于设定的距离阈值时,车辆发出离队通知并离队。
13.按上述方案,所述的步骤s1中,具体步骤为:
14.s11:选取车辆的“自行车”模型作为车辆运动学模型;设车辆质心为g,在平面直角坐标系中坐标为(x,y);车辆前轮的中心坐标为(x
α
,y
α
),车辆后轮的中心坐标为(x
β
,y
β
);车辆质心分别到车辆前轴和后轴的长度均为l;前轮转角为车辆航向角为θ;车辆的横向速度为v
α
、纵向速度为v
β
;
15.车辆的前轮、后轮分别与质心之间的关系表示为:
[0016][0017]
车辆在平面直角坐标系x轴方向的速度y轴方向的速度分别表示为:
[0018][0019]
车辆的纵向速度与横向速度关系表示为:
[0020][0021]
s12:建立跟车模型,设跟车距离l为领航车与跟随车的中心连线的距离,表示跟随车与领航车间的相对距离;设领航车的中心点为g
i
(x
i
,y
i
),跟随车的中心点为g
j
(x
j
,y
j
);车辆中心与前轴和后轴距离均为l;领航车的行驶方向与x轴的夹角为θ
i
,跟随车的行驶方向与x轴的夹角为θ
j
;领航车的前轮转角为跟随车的前轮转角为领航车的横向速度为v
αi
,跟随车的横向速度为v
αj
;领航车的纵向速度为v
βi
,跟随车的纵向速度为v
βj
;
[0022]
以领航车中心为坐标原点,行驶方向为y轴,垂直于车辆行驶方向指向右侧为x轴正方向建立车辆坐标系;
[0023]
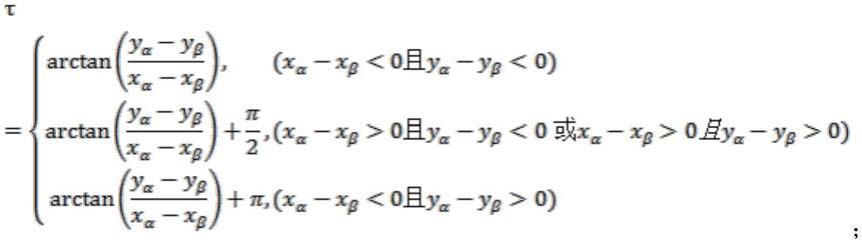
设邻车与本车的相对方位角τ,为在车辆坐标系中,从坐标轴的纵轴正方向起,顺时针量到本车质心点与邻车质心点所决定的直线间的夹角,取值范围为[0,2π]:
[0024][0025]
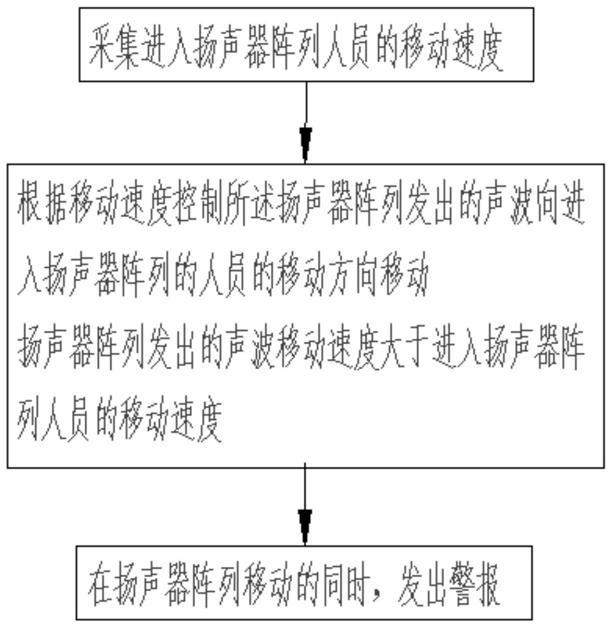
设跟车角度ω=2π
‑
τ是领航车的中心轴与两车中心连线间的夹角,表示跟随车与领航车的相对度;
[0026]
将领航车与跟随车之间的相对距离l分解为x轴和y轴方向上的l
x
和l
y
得到:
[0027][0028]
求导得:
[0029][0030]
l
x
和l
y
与领航车、领航车的位置关系如下:
[0031][0032]
求导得:
[0033][0034]
将(2)式代入(7)式得:
[0035][0036]
将(8)式代入(5)式得:
[0037][0038]
设领航车与领航车的中心连线与x轴的夹角为α,跟随车的水平轴与两车中心连线的夹角为则将式(9)简化为:
[0039][0040]
对ω求导得:
[0041][0042]
将(8)式代入(11)式得:
[0043][0044]
按上述方案,所述的步骤s2中,车辆通过红绿灯路口场景的工况的具体步骤为:
[0045]
s21:若前方路口为红灯,则领航车在路口刹车时将刹车信息通过车间通信传输给跟随车,提示跟随车减速停车;
[0046]
s22:若领航车需要变道,则开启转向灯后将转向灯开启状况通知给跟随车,提示跟随车有前车将要变道;
[0047]
s23:若路口红灯变为绿灯,则领航车在启动车辆时将启动信息通过车间通信传输给跟随车,提示跟随车启动;
[0048]
若判定在一个绿灯周期内无法通过车辆编队的全部车辆,则根据每辆车通过路口的时间和领航车通过路口的剩余绿灯时间拆分车辆编队通过,以拆分后的车辆编队的头车作为新的车辆编队的领航车。
[0049]
进一步的,所述的步骤s3中,具体步骤为:
[0050]
s31:若有车辆提出编队跟车需求,则通过无线通信模块将目标地址广播给通信范围内的车辆编队;
[0051]
s32:若允许增加车辆长度的车辆编队接收到的目标地址与已规划好的行驶路线匹配,则向提出编队跟车需求的车辆发送本车队的跟车模型、跟车速度、跟车距离以及车队队尾车辆位置g
n
(x
n
,y
n
);
[0052]
s33:根据提出编队需求的车辆的位置g
n 1
(x
n 1
,y
n 1
)和目标车队队尾车辆的位置,计算两车在平面直角坐标系下的距离;设第n 1辆车g
n 1
的横向速度为α
αn 1
、纵向速度为α
βn 1
,提出编队需求经过匹配时间t后进入车辆编队,并达到符合跟车模型的期望速度:
[0053][0054]
按上述公式求出第n 1辆车g
n 1
在匹配时间t的行驶状态,然后按照计算出的行驶状态进入车辆编队。
[0055]
按上述方案,所述的步骤s4中,具体步骤为:
[0056]
s41:若离队车辆为领航车,则通过车间通信向跟随车发出离队通知,待跟随车接管车辆编队后再离开车队;
[0057]
s42:若离队车辆为车队队尾车辆,则队尾车辆通过车间通信发出离队通知后离队;
[0058]
s43:若离队车辆为车队队列中车辆,则离队车辆的后车收到离队通知后按步骤s3计算并调整新的行驶状态,使本车与离队车辆的前车的距离为期望跟车距离。
[0059]
一种网联式车辆编队行驶系统,包括依次连接的天线、定位模块、控制模块,还包括连接控制模块的无线通信模块;无线通信模块用于接收和发送其他车辆的信息;天线用于接收和发送射频信号;定位模块用于根据射频信号获取自身的位置信息;控制模块用于处理接收到的位置信息和其他车辆的信息。
[0060]
一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种网联式车辆编队行驶方法。
[0061]
本发明的有益效果为:
[0062]
1.本发明的一种网联式车辆编队行驶方法和系统,通过对路径相似的车辆进行编队行驶,和通过车联网技术实现实时的编队行驶,当驾驶员输入目的地后,通过车联网快速寻找编队车辆实现跟车行驶的功能,缓解了城市交通拥堵情况,提高了行车安全性。
[0063]
2.本发明通过车间通信控制车辆的行驶状况,让车辆间距、车辆速度更加合理,减少了交通事故的发生。
[0064]
3.本发明充分利用了道路空间,提高了道路通行率。
附图说明
[0065]
图1是本发明实施例的车辆间的通信系统架构图。
[0066]
图2是本发明实施例的车辆自行车模型图。
[0067]
图3是本发明实施例的相对方位角图。
[0068]
图4是本发明实施例的跟车模型图。
[0069]
图5是本发明实施例的流程图。
具体实施方式
[0070]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0071]
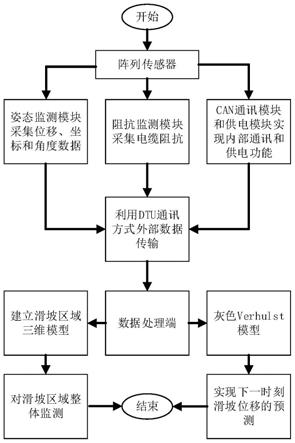
参见图5,本发明实施例的一种网联式车辆编队行驶方法,包括以下步骤:
[0072]
(1)第一阶段假设一个由n辆车组成的在水平面上正常行驶的车队。跟随车辆都安装了用于感知与其前面车辆之间相对距离和相对速度的传感器。每辆车都通过无线通信信道向它的跟随车辆发送自车的行驶状态信息,如图1。定义(x
i
,y
i
)及v
i
分别为第i(i=1,2,...n)辆车在平面直角坐标系下的位置和速度,其中(x0,y0)及v0分别为领队车辆的位置和速度。
[0073]
图1给出了车辆之间通信系统架构,其通常包括了以下几个子系统:
[0074]
1、无线电通信系统——接收和发送信号。
[0075]
2、天线——实现射频信号的接收和发送。
[0076]
3、定位系统——用于获取自身的位置信息。
[0077]
4、车载设备处理单元——用于处理感知到的其他车辆信息。
[0078]
本方案选取车辆的“自行车”模型作为车辆运动学模型,如图2所示。其中g为车辆质心,在平面直角坐标系中,坐标为(x,y);车辆前后轮中心坐标分别为(x
α
,y
α
)和(x
β
,y
β
);车辆质心到车辆前后轴的长度均为l;为前轮转角,θ为车辆航向角。v
α
和v
β
分别为车辆的横向速度和纵向速度。
[0079]
由图2可知,车辆前、后轮与质心之间的关系可表示为
[0080][0081]
车辆在平面直角坐标系x轴、y轴方向的速度可表示为
[0082][0083]
车辆的纵向速度和横向速度关系可以为
[0084][0085]
跟车模型如图4所示,跟车距离l为领航者与跟随者中心连线的距离,表示跟随者与领航者间的相对距离。g
i
(x
i
,y
i
)和g
j
(x
j
,y
j
)分别是领航者与跟随者的中心点;车辆中心与前轴和后轴距离均为l;θ
i
和θ
j
分别是领航者和跟随者行驶方向与x轴夹角;和分别是领航者和跟随者的前轮转角;v
αi
和v
αj
分别是领航者和跟随者的横向速度;v
βi
和v
βj
分别是领航者和跟随者的纵向速度。跟车角度ω=2π
‑
τ是领航者的中心轴与两车中心连线间的夹角,表示跟随者和领航者的相对度。以领航者中心为坐标原点,行驶方向为y轴,垂直于车辆行驶方向指向右侧为x轴正方向建立坐标系(以下简称为车辆坐标系)。
[0086]
相对方位角τ,取值范围为[0,2π],是指在本车坐标系中,从坐标轴纵轴正方向起,顺时针量到本车质心点与邻车质心点所决定的直线间的夹角,即为邻车与本车的相对方位角。如图3所示,根据图中所示的两车相对位置关系,此时邻车与本车的相对方位角即为300
°
。
[0087][0088]
将领航车与跟随车之间的相对距离l分解为x轴和y轴方向上的l
x
和l
y
,可得
[0089][0090]
求导得
[0091][0092]
由图2可知,l
x
和l
y
与两车的位置关系如下
[0093][0094]
求导得
[0095][0096]
将(2)式代入(7)式得
[0097][0098]
将(8)式代入(5)式得
[0099]
[0100]
其中α为两车中心连线与x轴的夹角。定义表示跟随者水平轴与两车中心连线的夹角,式(9)可化简为
[0101][0102]
对ω求导,可得
[0103][0104]
将(8)式代入(11)式得
[0105][0106]
(2)第二阶段车辆编队行驶过程中会遇到多种行驶场景,车辆在直线以及弯道行驶过程中按照跟车模型正常行驶即可,其中最为复杂的场景为车辆通过红绿灯路口。其场景分为以下几种工况:
[0107]
①
前方路口为红灯,则编队头车在路口刹车时刹车信息会通过车间通信传给后车,提示后方编队车辆减速停车;
[0108]
②
编队头车变道,则头车开启转向灯后会将转向灯开启状况通知给后方车辆,提示后方车辆前车将变道。
[0109]
③
路口红灯变为绿灯,则编队头车在启动车辆时会将启动信息通过车间通信传给后车,提示后车启动车辆;
[0110]
若车辆编队系统判定在一个绿灯周期内无法通过,则车辆编队系统根据每辆车通过的路口的时间以及领航者过路口时绿灯剩余时间进行车队拆分通过,拆分后的车辆首车变为新车队的领航者。
[0111]
(3)第三阶段若有车辆启动编队跟车需求,则其通过自身搭载的无线通信设备将其目的地广播给周围通信范围内车队,若允许增加车辆长度的车辆编队系统接收到的目标地址与其已规划好的行驶路线匹配,则向启动车辆编队需求的车辆发送本车队跟车模型、跟车速度、跟车距离以及车队队尾车辆位置g
n
(x
n
,y
n
)。根据启动编队需求车辆的位置g
n 1
(x
n 1
,y
n 1
)和目标车队队尾车辆的位置信息计算出两车在平面直角坐标系下的距离。假设a
αn 1
和a
βn 1
分别为车辆g
n 1
的横向速度和纵向速度,经过时间t后进入车队,并达到符合跟车模型的期望速度。
[0112][0113]
通过以上公式求出匹配时间t的行驶状态,然后启动车辆编队需求的车辆按照计算出的行驶状态进入车队。
[0114]
(4)第四阶段车辆在跟车行驶过程中,周期性的计算本车当前位置与目的地的行驶距离,当行驶距离小于系统设定的距离阈值时,车辆向车队编队系统发出离队通知。
[0115]
①
离队车辆为首车,通过车间通信通知后车,让后车接管编队,后车接管车队之后
再离开车队;
[0116]
②
离队车辆为尾车,车辆向车队编队系统发出离队通知后即可离队;
[0117]
③
离队车辆为队列中车辆,则离队车辆后车收到通知后根据上述的过程计算出新的跟车行驶状态以达到与离队车辆前车的距离为期望跟车距离。
[0118]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。