1.本发明涉及一种用于抑制塔式起重机进行起升运动时塔身振动的方法以及控制系统,属于起重运输机械技术领域。
背景技术:
2.塔式起重机是一种大型高空作业机械,主要由起升机构、变幅机构、回转机构和金属结构组成,具有占地面积小、灵活性强、工作效率高和安装拆卸方便等优点,被广泛应用于建筑领域。
3.为了提高塔式起重机的工作效率,建筑单位在施工时最大限度地提高塔式起重机的运行速度和起重量。但是,随着塔式起重机运行速度和起重量的增加,起升机构的启动和制动容易导致塔式起重机的塔身产生横向振动,塔身在铅垂面内的横向振动使塔式起重机结构产生交变应力,而这种交变应力正是塔式起重机塔身发生疲劳破坏甚至发生倾覆事故的主要原因。
4.目前,对于塔式起重机在起升过程中塔身的振动主要靠优化塔身的格构式结构,增加塔身的刚度得以减缓,但是出厂后的塔身的格构式结构是固定不变的,这意味着若基于常态起升条件设计塔身的结构,当塔式起重机在起升运动过程中出现极端起升条件时,这种结构对塔身振动的抑制效果有限,若基于极端起升条件设计塔身的结构,尽管可以在常态条件和极端条件下获得良好的抑振效果,但是这种结构优化的工作必然需要消耗大量的人力成本,时间成本和物资成本,因此,人们迫切需希望一种实时、准确抑制起重机进行起升运动时塔身振动的方法,但目前还没有这种方法。
技术实现要素:
5.针对现有起重机在起升运动时塔身振动的抑制技术存在的不足,本发明提供一种通过预测塔身振动并施加约束拉力来抑制塔身振动,以提高塔式起重机的稳定性、安全性、可靠性和使用寿命的抑制塔式起重机在起升过程中塔身振动的方法,同时提供一种实现该方法的控制系统。
6.本发明的抑制起重机起升运动时塔身振动的方法,是:
7.首先分析塔式起重机在起升过程中货物的运动对塔身振动的影响规律,建立塔身振动系统的动力学模型,根据塔身振动系统的动力学模型推导出塔身的实时广义刚度和实时广义质量数学表达式,然后根据实时测量的斜拉调节钢丝绳与塔身铰接处的横向振动幅值计算塔身的振动模态坐标,根据塔式起重机在起升过程中的状态参数计算塔身的实时广义刚度和实时广义质量,通过塔身的振动模态坐标和实时广义刚度和实时广义质量计算下一时刻的横向振动幅值以计算所需要调节的斜拉调节绳的长度,从而给塔身施加约束力,以达到抑制塔身振动的目的。
8.所述塔身振动系统的动力学模型的建立过程如下所述:
9.以沿着水平地面且远离塔身的方向为x轴的正方向,以沿着初始状态下的塔身中
心线且远离地面的方向为坐标轴y轴的正方向,以地面与初始状态下的塔身中心线的交点为坐标系原点o建立惯性坐标系xoy;将塔身等效为以地面为固定端且具有端部质量的悬臂梁,将塔式起重机回转部分(起重臂和平衡臂)等效为端部质量,将变幅小车、货物和吊钩等效为铅垂面内的移动质量,从而将塔身
‑
回转部分
‑
变幅小车
‑
货物系统简化为悬臂梁
‑
端部质量
‑
移动质量系统,根据悬臂梁
‑
端部质量
‑
移动质量系统建立塔身振动系统的动力学模型。
10.所述计算塔身的振动模态坐标的过程是:
11.塔身在铅垂面内的横向振动幅值x(y,t)与塔身的振动模态坐标q
i
(t)的对应关系表示为:
[0012][0013]
式中,x(y,t)为塔身在铅垂面内在t时刻距离地面y位置处的横向振动幅值,q
i
(t)为正则坐标下的塔身第i阶振动模态坐标,为正则坐标下的塔身第i阶振型函数,表示为:
[0014][0015]
式中,式中,为塔身的单位长度质量,l
t
为塔身顶部到地面的距离,m1=m
b
m
cb
m
cw
为回转部分的质量,j=j
b
j
cb
j
cw
为回转部分的转动惯量,m
b
为起重臂的质量,m
cb
为平衡臂的质量,m
cw
为平衡重的质量,j
b
为在初始状态下起重臂绕起重臂中心线与塔身中心线交点上的轴线转动的转动惯量,该轴线垂直于起重臂和塔身,j
cb
为在初始状态下平衡臂绕该轴线转动的转动惯量,j
cw
为在初始状态下平衡重绕该轴线转动的转动惯量,φ
i
(y)=cosh(λ
i
y)
‑
cos(λ
i
y) ξ
i
[sinh(λ
i
y)
‑
sin(λ
i
y)]为非正则坐标下的塔身第i阶振型函数,m
t
为塔身的总质量,λ
i
为第i阶频率方程的解,第i阶频率方程表示为:
[0016][0017]
塔身第i阶振动模态坐标q
i
(t)与塔身第i阶模态的振动固有频率ω
i
、变幅小车距塔身中心线的距离l
c
、货物作起升运动的加速度、变幅小车的质量m
c
和起重量(货物的质量)m
p
的关系如数学模型所示,数学模型表示为:
[0018][0019]
式中,表示振型函数对空间坐标y取1阶导数。
[0020]
所述计算塔身的实时广义刚度和实时广义质量的过程是:
[0021]
基于塔身振动系统的动力学模型,推导出处于振动状态下的塔身的实时广义刚度[k]和实时广义质量[m],分别表示为:
[0022][0023][0024]
式中,p
m
=(m
p
m
c
)l
c
,l
c
是变幅小车距塔身中心线的距离、m
c
是变幅小车的质量,m
p
是起重量,是起重量,表示振型函数对空间坐标y取1阶导数,m=1,2,3...,n=1,2,3...,l
t
为塔身顶部到地面的距离,为塔身第n阶模态的振动固有频率,为塔身的单位长度质量,e为塔身的弹性模量,i为塔身的截面惯性矩。
[0025]
根据上述公式和实测的起重量m
p
和变幅小车距塔身中心线的距离l
c
计算塔身的实时广义刚度[k]和实时广义质量[m]。
[0026]
所述计算所需要的斜拉调节钢丝绳的长度为:
[0027][0028]
式中,t为采样周期,k=1,2,3
…
,δl
w
((k 1)t)为在(k 1)t时刻斜拉钢丝绳需要调节的长度,x
t
(l
t
,(k 1)t)为在(k 1)t时刻塔身顶部在铅垂面内的横向振动幅值,l
t
为塔身顶部到地面的距离,l
w
为塔身顶部到长度智能调节伺服电机的距离,长度智能调节伺服电机固定在地面上,电机到塔身中位线的距离可根据塔式起重机的安装环境进行调节。
[0029]
实现上述方法的抑制起重机起升过程中塔身振动的系统,采用以下技术方案:
[0030]
该系统,包括斜拉调节钢丝绳、振动倾角仪、塔式起重机安全监控管理黑匣子、中控系统、斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统、塔身实时广义刚度和实时广义质量计算子系统、斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统和斜拉调节钢丝绳智能调节子系统;
[0031]
斜拉调节钢丝绳的一端铰接在塔身的顶部,另一端与斜拉调节钢丝绳智能调节子系统连接;
[0032]
振动倾角仪水平安装在斜拉调节钢丝绳与塔身铰接处所在的塔身横截面的中心位置,用于实时测量该点所在的塔身的横截面绕塔身的中性轴偏转的角度;
[0033]
塔式起重机安全监控管理黑匣子用于储存和输出起重量(货物的质量)和变幅小车距塔身中心线的距离;
[0034]
中控系统,用于控制数据的输入与输出以及数据的转换,根据悬臂梁任意截面的横向位移与转角的关系将由振动倾角仪输出的数据转换为塔身在铅垂面内的实时横向振动幅值输入到斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统,将塔式起重机安全监控管理黑匣子输出的起重量和变幅小车距塔身中心线的距离输入到塔身实时广义刚度和实时广义质量计算子系统,将塔身实时广义刚度和实时广义质量计算子系统输出的实时广义刚度和实时广义质量和斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统输出的数据输入到斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子
系统,将斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统输出的数据输入到斜拉调节钢丝绳智能调节子系统;
[0035]
斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统,用于建立塔身在铅垂面内的横向振动幅值与塔身的振动模态坐标的对应关系,利用有中控系统输出的塔身在铅垂面内的横向振动幅值计算塔身在铅垂面内的振动模态坐标,并将计算结果输出到中控系统;
[0036]
塔身实时广义刚度和实时广义质量计算子系统,用于建立塔身在铅垂面内的横向振动的实时广义刚度和实时广义质量与塔式起重机在起升过程中的状态参数关系,利用由中控系统输出的塔式起重机在起升过程中的状态参数计算塔身在铅垂面内的实时广义刚度和实时广义质量,并将计算结果输出到中控系统;
[0037]
斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统,基于塔身振动控制系统的动力学模型建立差分方程,利用中控系统输出的塔身在铅垂面内的振动模态坐标、塔身的实时广义刚度和实时广义质量计算塔身下一时刻的横向振动幅值并输出到中控系统;
[0038]
斜拉调节钢丝绳智能调节子系统,用于建立斜拉调节钢丝绳的调节长度与塔身下一时刻横向振动幅值的关系,包括长度智能调节伺服驱动器和长度智能调节伺服电机,该系统利用由中控系统输出的起塔身下一时刻的横向振动幅值计算下一时刻所需调节的斜拉调节钢丝绳的长度,长度智能调节伺服驱动器驱动长度智能调节伺服电机运行,从而调节斜拉调节钢丝绳的长度,进而给塔身施加约束力,达到了抑制塔身振动的目的。
[0039]
本发明针对塔式起重机在起升过程中,利用塔身顶部在铅垂面内的横向振动幅值的变化实时测量塔身的广义刚度和广义质量来改变斜拉调节钢丝绳的长度,以给塔身施加约束力,从而达到了抑制塔身振动的目的,减小了作业时间,提高了工作效率,也提高了塔式起重机的稳定性、安全性和可靠性。
附图说明
[0040]
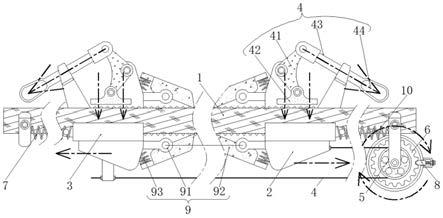
图1是本发明中塔式起重机的结构原理示意图。
[0041]
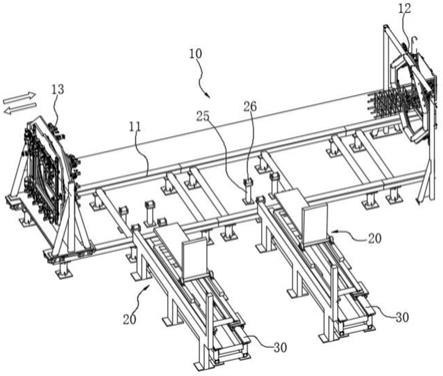
图2是本发明中塔式起重机的俯视图。
[0042]
图3是本发明中塔身
‑
回转部分
‑
变幅小车
‑
货物系统的模型示意图。
[0043]
图4是本发明中斜拉调节钢丝绳智能调节子系统的结构框图。
[0044]
其中:1、长度智能调节伺服驱动器,2、长度智能调节伺服电机,3、基础,4、塔身,5、回转机构,6、回转平台,7、平衡重,8、平衡臂,9、起升机构,10、电控柜,11、起重臂,12、变幅小车,13、起升钢丝绳,14、吊钩,15、货物,16、斜拉调节钢丝绳,17、腹杆,18、振动倾角仪,19、驾驶室,20、中控台,21、塔式起重机安全监控管理黑匣子。
具体实施方式
[0045]
本发明针对当塔式起重机在起升过程中,既没有测量塔身实时广义刚度和实时广义质量的有效办法,也没有抑制塔身振动的装置的技术情况,利用斜拉调节钢丝绳与塔身铰接处的横向振动幅值的变化实时测量塔身的广义刚度和广义质量以改变斜拉调节钢丝绳的长度,从而给塔身施加约束力。
[0046]
图1给出了本发明采用的塔式起重机结构,该塔式起重机与现有塔式起重机相同的结构有:基础3、塔身4、回转机构5、回转平台6、平衡重7,平衡臂8、起升机构9、电控柜10、
起重臂11、变幅小车12、起升钢丝绳13、吊钩14、货物15、腹杆17和驾驶室19。除此之外,该塔式起重机与现有塔式起重机不同的结构有:长度智能调节伺服驱动器1和长度智能调节伺服电机2固定在地面上,长度智能调节伺服电机2到塔身中位线的距离根据塔式起重机的安装环境进行调节,斜拉调节钢丝绳16的一端与长度智能调节伺服电机2连接,斜拉调节钢丝绳16的另一端铰接在塔身4的顶部的棱角处,振动倾角仪18水平安装在斜拉调节钢丝绳16与塔身4铰接处所在的塔身横截面的中心位置,另外在驾驶室19内设置有中控台(中控系统)20和塔式起重机安全监控管理黑匣子21。
[0047]
本发明的抑制起重机进行起升运动时塔身振动的方法,包括以下步骤:
[0048]
(1)建立塔式起重机在起升过程中的状态参数(变幅小车距塔身中心线的距离、货物作起升运动的加速度和起重量)与塔身顶部的横向振动幅值的对应关系。
[0049]
①
建立空间坐标系
[0050]
如图3所示,以沿着水平地面且远离塔身的方向为x轴的正方向,以沿着初始状态下的塔身中心线且远离地面的方向为坐标轴y轴的正方向,以地面与初始状态下的塔身中心线的交点为坐标系原点o建立惯性坐标系xoy;将塔身等效为以地面为固定端且具有端部质量的悬臂梁,将塔式起重机回转部分(起重臂和平衡臂)等效为端部质量,将变幅小车、货物和吊钩等效为铅垂面内的移动质量,从而将塔身
‑
回转部分
‑
变幅小车
‑
货物系统简化为悬臂梁
‑
端部质量
‑
移动质量系统,根据悬臂梁
‑
端部质量
‑
移动质量系统建立塔身振动系统的动力学模型。图3中,x(y,t)为塔身在铅垂面内在t时刻,距离地面y位置处的横向振动幅值,l
t
为塔身顶部到地面的距离,l
c
为变幅小车距塔身中心线的距离,m
c
为变幅小车的质量,m
p
为起重量(货物的质量),l为吊钩到变幅小车之间的钢丝绳的长度,为货物作起升运动的速度,为货物作起升运动的加速度。
[0051]
移动质量是建立动力学模型使用的名词,与悬臂梁相对应;起重量是工程实际使用的名词,与起升运动的速度和加速度相对应。
[0052]
②
建立塔身振动微分方程
[0053]
塔身在铅垂面内的横向振动幅值x(y,t)与塔身的振动模态坐标q
i
(t)的对应关系表示为:
[0054][0055]
式中,x(y,t)为塔身在铅垂面内在t时刻,距离地面y位置处的横向振动幅值,q
i
(t)为正则坐标下的塔身第i阶振动模态坐标,为正则坐标下的塔身第i阶振型函数,表示为:
[0056][0057]
式中,式中,为塔身的单位长度质量,l
t
为塔身顶部到地面的距离,m1=m
b
m
cb
m
cw
为回转部分的质量,j=j
b
j
cb
j
cw
为回转部分的转动惯量,m
b
为起重臂的质量,m
cb
为平衡臂的质量,m
cw
为平衡重的质量,j
b
为在初始状态下起重臂绕起重臂中心线与塔身中心线交点上的轴线转动的转动惯量,该轴线垂直于起重臂和塔身,j
cb
为在初始状态下平衡臂绕该轴线转动的转动惯量,j
cw
为在初始状态下平衡重绕该轴线转动的转动惯量,φ
i
(y)=cosh(λ
i
y)
‑
cos(λ
i
y) η
i
[sinh(λ
i
y)
‑
sin(λ
i
y)]为非正则坐标下的塔身
第i阶振型函数,m
t
为塔身的总质量,λ
i
为第i阶频率方程的解,第i阶频率方程表示为:
[0058][0059]
悬臂梁在水平横向力和弯矩作用下的振动微分方程表示为
[0060][0061]
式(4)中,为作用在梁上的分布力,为作用在梁上的分布弯矩。
[0062]
梁的边界条件可以具体表现为边界上的位移、转角、弯矩和剪力的状态,其中位移表示为x(y,t),转角表示为x
′
(y,t),弯矩表示为eix
″
(y,t),剪力表示为eix
″′
(y,t)。根据悬臂梁
‑
端部质量
‑
移动质量系统,塔身的端部的起重机回转部分不仅尺寸大,而且重量大,当塔身发生振动时,回转部分作为附着于塔身端部的端部质量将产生很大的惯性,大幅度减缓了塔身的弯曲振动,因此,塔身的边界条件应该考虑回转部分的转动惯性和平动惯性,则塔身的边界条件如下:
[0063][0064]
基于上述边界条件,将塔身等效为悬臂梁,则式(4)表示塔身在水平横向力和弯矩作用下的振动微分方程。
[0065]
将式(1)代入式(4)中,得
[0066][0067]
式(5)中,表示函数对空间坐标y取1阶导数。
[0068]
在式(5)两边同时乘以并在区间[0,l
t
]上对y进行积分得
[0069][0070]
对于边界条件式(5),当y=l
t
时,有
[0071][0072]
将式(1)代入式(8),得
[0073][0074]
在式(9)两边同时乘以得
[0075][0076]
在式(10)两边同时乘以得
[0077][0078]
用式(7)加式(11)减式(12),得
[0079][0080]
根据塔身振型函数的正交性,当i≠j时,振型函数正交,因此,当i=j时,可将式(13)化简为
[0081][0082]
将(14)正则化,可得正则坐标下塔身的结构振动微分方程,表示为
[0083][0084]
根据悬臂梁
‑
端部质量
‑
移动质量系统,塔身主要受弯矩的作用,因此式(15)中此外,在起升工况下货物在铅垂面内作起升运动的同时,货物和变幅小车也将随着刚性起重臂上下振动,所以对于塔身的结构振动微分方程的广义力不仅应该考虑货物由于加速、减速导致的惯性力,还应该考虑由刚性起重臂振动而导致的惯性力。因此,任意时刻t作用在塔身的弯矩表示为:
[0085][0086]
式(16)中,g为重力加速度,δ为狄利克雷函数,即单位脉冲函数。
[0087]
将式(16)代入式(15),得
[0088][0089]
化简式(17),得
[0090][0091]
则,式(18)为在起升过程中塔身振动系统的动力学模型。
[0092]
(2)获取塔式起重机的塔身的实时广义刚度和实时广义质量
[0093]
将式(18)以矢量的形式表示为:
[0094][0095]
式(19)中,[m]为塔身振动系统的实时广义质量,[m]表示为:
[0096][0097]
式(20)中,p
m
=(m
p
m
c
)l
c
,,表示振型函数对空间坐标y取1阶导数,m=1,2,3...,n=1,2,3...。
[0098]
[k]为系统的实时广义刚度,[k]表示为:
[0099][0100]
式(21)中,为塔身的第n阶模态的振动固有频率,e为塔身的弹性模量,i为塔身的截面惯性矩。
[0101]
[f]为系统的广义外力,[f]表示为:
[0102][0103]
[q
i
(t)]为模态坐标矩阵,[q
i
(t)]表示为:
[0104][0105]
表示为:
[0106][0107]
根据式(20)、式(21)和用塔式起重机安全监控管理黑匣子测量获得的塔式起重机在起升过程中的状态参数(变幅小车距塔身中心线的距离和起重量)可计算获得塔式起重机的塔身的实时广义刚度和实时广义质量。
[0108]
(3)根据塔式起重机的塔身的实时广义刚度和实时广义质量预测下一时刻塔身的横向振动幅值,通过调整斜拉调节钢丝绳的长度来给塔身施加约束力。
[0109]
基于塔身振动系统的动力学模型建立差分方程,利用塔身的动刚度和塔身的振动模态坐标预测塔身下一时刻的横向振动幅值。
[0110]
令w1(t)=q(t),则式(19)表示为:
[0111][0112]
基于塔身振动系统的动力学模型建立差分方程,表示为:
[0113]
w1[(k 1)t]
‑
w1(kt)=tw2(kt)
ꢀꢀ
(26)
[0114]
w2[(k 1)t]
‑
w2(kt)=t[m]
‑1[f]
‑
tw1(kt)[m]
‑1[k]
ꢀꢀ
(27)
[0115]
式(26)和式(27)中,t为采样周期,k=1,2,3...,w1[(k 1)t]为下一时刻塔身在铅垂面内的振动模态坐标。
[0116]
因此,基于塔身的实时动刚度和根据实测的塔身的横向振动幅值计算的塔身的振动模态坐标,根据式(26)和式(27)可预测下一时刻的塔身在铅垂面内的振动模态坐标,再利用式(1)计算获得下一时刻的塔身在铅垂面内的横向振动位置。
[0117]
根据预测的塔身在铅垂面内的横向振动幅值,再通过斜拉调节钢丝绳智能调节子系统的伺服控制器生成控制命令,长度智能调节伺服驱动器驱动长度智能调节伺服电机,调节斜拉调节钢丝绳的长度,给塔身施加约束力,以达到抑制塔身振动的目的。
[0118]
斜拉调节钢丝绳的长度表示为:
[0119][0120]
式(28)中,t为采样周期,k=1,2,3
…
,δl
w
((k 1)t)为在(k 1)t时刻斜拉钢丝绳需要调节的长度,x
t
(l
t
,(k 1)t)为在(k 1)t时刻塔身顶部在铅垂面内的横向振动幅值,l
w
为塔身顶部到长度智能调节伺服电机的距离,长度智能调节伺服电机固定在地面上,电机到塔身中位线的距离可根据塔式起重机的安装环境进行调节。
[0121]
本发明实现上述的方法的控制系统如图4所示,包括斜拉调节钢丝绳16、振动倾角仪18、塔式起重机安全监控管理黑匣子21、中控系统(置于中控台20)、斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统、塔身实时广义刚度和实时广义质量计算子系统、斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统和斜拉调节钢丝绳智能调节子系统;
[0122]
斜拉调节钢丝绳16的一端铰接在塔身的顶部,另一端与斜拉调节钢丝绳智能调节子系统连接;
[0123]
振动倾角仪18水平安装在斜拉调节钢丝绳与塔身铰接处所在的塔身横截面的中心位置,用于实时测量该点所在的塔身的横截面绕塔身的中性轴偏转的角度;
[0124]
塔式起重机安全监控管理黑匣子21用于储存和输出起重量(货物的质量)和变幅小车距塔身中心线的距离;
[0125]
中控系统,用于控制数据的输入与输出以及数据的转换,根据悬臂梁任意截面的横向位移与转角的关系将由振动倾角仪18输出的数据转换为塔身在铅垂面内的实时横向振动幅值输入到斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统,将塔式起重机安全监控管理黑匣子21输出的起重量和变幅小车距塔身中心线的距离输入到塔身实时广义刚度和实时广义质量计算子系统,将塔身实时广义刚度和实时广义质量计算子系统输出的实时广义刚度和实时广义质量和斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统输出的数据输入到斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统,将斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统输出的数据输入到斜拉调节钢丝绳智能调节子系统;
[0126]
斜拉调节钢丝绳与塔身铰接处的模态坐标计算子系统,用于建立塔身在铅垂面内的横向振动幅值与塔身的振动模态坐标的对应关系,利用有中控系统输出的塔身在铅垂面内的横向振动幅值计算塔身在铅垂面内的振动模态坐标,并将计算结果输出到中控系统;
[0127]
塔身实时广义刚度和实时广义质量计算子系统,用于建立塔身在铅垂面内的横向
振动的实时广义刚度和实时广义质量与塔式起重机在起升过程中的状态参数关系,利用由中控系统输出的塔式起重机在起升过程中的状态参数计算塔身在铅垂面内的实时广义刚度和实时广义质量,并将计算结果输出到中控系统;
[0128]
斜拉调节钢丝绳与塔身铰接处横向振动幅值预测子系统,基于塔身振动控制系统的动力学模型建立差分方程,利用中控系统输出的塔身在铅垂面内的振动模态坐标和塔身的实时广义刚度和实时广义质量计算塔身下一时刻的横向振动幅值并输出到中控系统;
[0129]
斜拉调节钢丝绳智能调节子系统,用于建立斜拉调节钢丝绳的调节长度与塔身下一时刻横向振动幅值的关系,包括长度智能调节伺服驱动器和长度智能调节伺服电机,该系统利用由中控系统输出的起塔身下一时刻的横向振动幅值计算下一时刻所需调节的斜拉调节钢丝绳16的长度,长度智能调节伺服驱动器1驱动长度智能调节伺服电机2运行,从而调节斜拉调节钢丝绳16的长度,进而给塔身施加约束力,达到了抑制塔身振动的目的。
[0130]
本发明未详尽说明的内容均为现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。