技术特征:
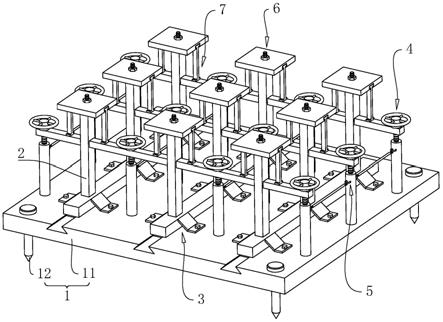
1.一种割台机构,其特征在于,包括:割台(1);割台倾斜驱动机构(2),与所述割台(1)传动连接并用于驱动所述割台(1)左倾或者右倾;仿形装置(3),数量为两个,两个所述仿形装置(3)分布在所述割台(1)的左右两侧,每一个所述仿形装置(3)包括传感器(31),所述传感器(31)用于检测与所述割台(1)的离地高度对应的测试信息;控制器(4),所述割台倾斜驱动机构(2)和每一所述传感器(31)均与所述控制器(4)电连接,所述控制器(4)用于根据左右两侧的所述传感器(31)检测的测试信息控制所述割台倾斜驱动机构(2)动作,以使所述割台(1)左右两侧的离地高度的差值在预设范围内。2.根据权利要求1所述的割台机构,其特征在于,还包括割台升降驱动机构(5),所述割台升降驱动机构(5)与所述割台(1)传动连接并用于驱动所述割台(1)升降;所述割台升降驱动机构(5)与所述控制器(4)电连接,所述控制器(4)用于根据左右两侧的所述传感器(31)检测的测试信息控制所述割台升降驱动机构(5)动作,以使所述割台(1)的离地高度在预设高度范围内。3.根据权利要求1所述的割台机构,其特征在于,还包括与所述控制器(4)电连接的显示装置(6);所述显示装置(6)用于显示所述割台(1)的工作信息,所述工作信息包括当前高度值、预设高度范围、预设高度参考值、升降死区、倾斜死区、动作灵敏度、升降动作指示、倾斜动作指示中的任意一项或者多项的组合;和/或,所述显示装置(6)用于向所述控制器(4)输出调整所述割台(1)的工作参数的调节指令,所述工作参数包括目标高度值、预设高度范围、预设高度参考值、升降死区、倾斜死区、动作灵敏度、升降动作指示、倾斜动作指示中的任意一项或者多项的组合。4.根据权利要求1所述的割台机构,其特征在于,所述割台倾斜驱动机构(2)包括倾斜液压油缸(21)、左倾电磁阀(22)和右倾电磁阀(23),所述倾斜液压油缸(21)与所述割台(1)传动连接,所述左倾电磁阀(22)和右倾电磁阀(23)均安装于所述倾斜液压油缸(21)的控制油路并控制所述倾斜液压油缸(21)的动作,所述左倾电磁阀(22)和右倾电磁阀(23)分别与所述控制器(4)电连接。5.根据权利要求1至4任意一项所述的割台机构,其特征在于,所述仿形装置(3)还包括第一连杆(32)、第二连杆(33)和用于接触地面的仿形靴(34),所述第一连杆(32)的第一端通过测试转轴与所述割台(1)铰接,所述第一连杆(32)的第二端与所述第二连杆(33)的第一端铰接,所述第二连杆(33)的第二端与所述仿形靴(34)的中部铰接,所述仿形靴(34)的端部与所述割台(1)的前侧铰接;所述传感器(31)为角度传感器,所述传感器(31)检测的测试信息为所述测试转轴的转动角度。6.一种仿形控制方法,其特征在于,应用于权利要求1至5任意一项所述的割台机构,包括:获取左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息;根据左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息,确定所述割台(1)的左侧的离地高度和右侧的离地高度;
当所述割台(1)的左侧的离地高度与右侧的离地高度的差大于预设左倾斜极限值时,向所述割台倾斜驱动机构(2)发出左倾指令,以使所述割台(1)的左侧降低和/或右侧升高;当所述割台(1)的右侧的离地高度与左侧的离地高度的差大于预设右倾斜极限值时,向所述割台倾斜驱动机构(2)发出右倾指令,以使所述割台(1)的右侧降低和/或左侧升高。7.根据权利要求6所述的仿形控制方法,其特征在于,还包括:向割台升降驱动机构(5)发送倾斜标定指令,以使左侧的所述仿形装置(3)和右侧的所述仿形装置(3)下落在同一水平面;将所述割台(1)的左侧的离地高度与右侧的离地高度的差确定为0。8.根据权利要求6至7任意一项所述的仿形控制方法,其特征在于,在所述获取左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息之后,还包括:根据左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息,确定所述割台(1)的实际离地高度;当所述割台(1)的实际离地高度大于预设上限高度时,向割台升降驱动机构(5)发出下降指令,以使所述割台(1)下降到所述预设上限高度以下;当所述割台(1)的实际离地高度小于预设下限高度时,向割台升降驱动机构(5)发出上升指令,以使所述割台(1)上升到所述预设下限高度以上。9.根据权利要求8所述的仿形控制方法,其特征在于,所述根据左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息,确定所述割台(1)的实际离地高度的过程具体为:根据左侧的所述传感器(31)的测试信息确定左侧的离地高度,根据右侧的所述传感器(31)的测试信息确定右侧的离地高度;将左侧的离地高度和右侧的离地高度的平均值确定为所述割台(1)的实际离地高度。10.一种仿形控制系统,其特征在于,应用于权利要求1至5任意一项所述的割台机构,包括:获取模块(100),用于获取左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息;离地高度确定模块(200),用于根据左侧的所述传感器(31)的测试信息和右侧的所述传感器(31)的测试信息,确定所述割台(1)的左侧的离地高度和右侧的离地高度;左倾执行模块(300),用于当所述割台(1)的左侧的离地高度与右侧的离地高度的差大于预设左倾斜极限值时,向所述割台倾斜驱动机构(2)发出左倾指令,以使所述割台(1)的左侧降低和/或右侧升高;右倾执行模块(400),用于当所述割台(1)的右侧的离地高度与左侧的离地高度的差大于预设右倾斜极限值时,向所述割台倾斜驱动机构(2)发出右倾指令,以使所述割台(1)的右侧降低和/或左侧升高。
技术总结
本申请公开了一种割台机构、仿形控制方法和仿形控制系统,割台机构包括割台、割台倾斜驱动机构、仿形装置和控制器;割台倾斜驱动机构与割台传动连接并用于驱动割台左倾或者右倾;仿形装置有两个,二者分布在割台的左右两侧,每一个仿形装置包括用于检测与割台的离地高度对应的测试信息的传感器;割台倾斜驱动机构和每一传感器均与控制器电连接,控制器根据左右两侧的传感器检测的测试信息控制割台倾斜驱动机构动作,以使割台的左右两侧的离地高度的差值在预设范围内。在遇到地面左右不平的情况时,应用本申请提供的技术方案可以使割台左侧离地高度与割台右侧离地高度的差值在预设范围,保证了植物留杆长度的一致性,提高了饲料的质量。饲料的质量。饲料的质量。
技术研发人员:刘飞香 刘彪权 伍涛 廖金军 龚文忠 李泽
受保护的技术使用者:铁建重工新疆有限公司
技术研发日:2021.07.12
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。