1.本发明涉及清理设备技术领域,特别涉及一种马厩辅助清理机器人。
背景技术:
2.随着社会的发展,人们的经济水平提高,人们越来越多的喜欢骑马,从而影响了人们对于马的养殖,而养马需要马厩,继而增加了马厩的个数,马厩的增加继而使马厩的清理出现了问题,传统马厩的清理需要人工进行,不仅需要大量的人力,而且还需要耗费大量的时间,且清理后的马粪与草料的处理也是一大问题。
技术实现要素:
3.针对上述问题,本发明提供了一种马厩辅助清理机器人,以解决人工清理需要大量人力物力,且需要大量的时间,也解决了清理后马粪与草料的分离问题。
4.本发明所使用的技术方案是:一种马厩辅助清理机器人,包括整体移动部、清理部、一次分离部、传送部、二次分离传送部;其特征在于,所述的整体移动部为可移动的主体,整体移动部包括固定底板;清理部将马厩中的杂物叉起放到一次分离部中;清理部包括齿轮支撑板、叉子移动支撑板、前进机构;齿轮支撑板下端固定安装在固定底板的一侧凸出位置;叉子后端下部固定安装在前进机构的前端;前进机构活动安装在固定底板上;一次分离部将清理部运输过来的杂物进行分离;一次分离部包括:分离放置盒;分离放置盒下端的固定板固定安装在固定底板上;传送部将一次分离部分离出的马粪运输到马粪放置箱中;传送部的固定板下端固定安装在固定底板上;二次分离传送部将一次分离部分离并运输出的草料运输到抖动分离机构中并进行清理部二次分离,并将分离后的草料运输到干草放置箱中,分离出的马粪运输到传送带b上,并经过传送带b运输到马粪放置箱中;整体移动部将设备运输到指定位置,清理部将杂物运输到一次分离部中,一次分离部将其过滤并分开运输,传送部将马粪运输到马粪放置箱中,二次分离传送部将一次分离部运输的进行二次分离,并分开运输到干草放置箱与马粪放置箱中;这样实现了马厩的辅助清理机分离,节约了清理马厩需要的人力。
5.优选地,所述的整体移动部还包括: 电机、链轮组a、控制齿轮a、齿轮a、蜗轮组a、移动轮;.所述的电机固定安装在固定底板的中部;链轮组a一端的齿轮固定安装在电机的轴上;控制齿轮a活动安装在链轮组a中部齿轮的轴上;齿轮a固定安装在蜗轮组a杆的末端;移动轮分为两部分;蜗轮组a轮固定安装在移动轮一部分的轴上;移动轮的轴活动安装在固定底板下端的固定块的孔中。
6.优选地,所述的清理部还包括:叉子、升降旋转机构、清理部动力齿轮组、上旋转齿轮组、上叉子翻转齿轮组、控制齿轮b、齿轮b、下叉子翻转控制齿轮组、蜗轮组b、叉子翻转控制机构;所述的叉子后端活动安装在升降旋转机构的下部;升降旋转机构下部活动安装在
叉子移动支撑板上,升降旋转机构上端活动安装在齿轮支撑板上端;清理部动力齿轮组左端齿轮的轴活动安装在固定底板上的固定块的孔中,清理部动力齿轮组右端齿轮固定安装在链轮组a右端齿轮的轴的中部;上旋转齿轮组左端的轴活动安装在齿轮支撑板上端挡板的下部,上旋转齿轮组有端的轴的下端活动安装在固定底板上;上叉子翻转齿轮组左侧的轴活动安装在齿轮支撑板上挡板的孔中,上叉子翻转齿轮组右侧的轴下端活动安装在固定底板上;控制齿轮b轴的下端活动安装在固定底板上;齿轮b固定安装在蜗轮组b杆的末端;下叉子翻转控制齿轮组轴的下端固定安装在固定底板上;蜗轮组b的轮固定安装在控制齿轮b轴的下部;叉子翻转控制机构下端活动安装在叉子后端的固定板上,叉子翻转控制机构上端右侧齿轮得我轴固定安装在叉子移动支撑板上。
7.优选地,所述的一次分离部还包括:旋转分离棍、过滤筛、过滤筛移动控制齿轮组、链轮组b、链轮组c、传送带a;所述的旋转分离棍两端转动安装在分离放置盒上端的孔中;过滤筛滑动安装在分离放置盒左侧的孔中;过滤筛移动控制齿轮组一端齿轮固定安装在链轮组b右端齿轮轴的右侧,过滤筛移动控制齿轮组另一端的齿轮连接的凸轮滑动安装在过滤筛中部的固定块中间;链轮组b左端齿轮固定安装在链轮组a右端齿轮的轴的前端;链轮组c下端齿轮固定安装在链轮组b右端齿轮的轴的左侧,链轮组c上端齿轮固定安装在旋转分离棍轴的右端;传送带a右侧的轴的右端固定安装在链轮组b右端齿轮的轴的左侧;传送带a的轴活动安装在分离放置盒下端的左侧板的孔中。
8.优选地,所述的传送部包括:传送带b、传送支撑板、蜗轮组c、链轮组d;所述的传送带b的轴转动安装在传送支撑板上端的孔中;传送支撑板的下端固定安装在固定底板上;蜗轮组c的轮固定安装在传送带b中部的轴的右端,蜗轮组c的杆固定安装有链轮组d左端的齿轮,蜗轮组c杆的中部活动安装在移动传送机构传送带支撑板的孔中;链轮组d右端的齿轮固定安装在链轮组a右的齿轮的轴的前端。
9.优选地,所述的二次分离传送部包括:分离传送支撑板、分离传送带、抖动分离机构、干草放置箱、马粪放置箱、蜗轮组d、链轮组e、移动传送机构、蜗轮组e、链轮组f;所述的分离传送支撑板下端固定安装在固定底板的上端,分离传送支撑板上端的孔中转动安装有分离传送带的轴;抖动分离机构中部的轴滑动安装在固定底板上的固定板的凹槽中;蜗轮组d的轮固定安装在分离传送带一端轴的后面,蜗轮组d的杆固定安装在链轮组e一侧齿轮上;链轮组e另一侧齿轮固定安在链轮组a右侧齿轮轴的左侧末端;移动传送机构一侧齿轮固定安装在抖动分离机构右侧齿轮轴的中部;蜗轮组e的杆固定安装在链轮组a右端齿轮的右侧,蜗轮组e的轮固定安装在链轮组f下端齿轮的轴上;链轮组f上端的凸轮滑动安装在抖动分离机构下端挡板的固定块的中间。
10.有益效果:1.当需要清理马厩时,电机带动设备移动到指定位置。自动移动位置不用人工移动位置。
11.2.链轮组a带动叉子倾斜到一定角度。清理部动力齿轮组带动叉子移动位置后停止。叉子回到水平位置,控制齿轮b带动叉子移动到指定位置。前进机构带动升降旋转机构与叉子回到原位。调整叉子位置使叉子将杂物叉起。
12.3.控制齿轮b使叉子旋转到分离放置盒上方,同时叉子翻转控制机构带动叉子翻
转,继而使叉子上的杂物掉落到分离放置盒中。将杂物清理放置到指定位置。
13.4.链轮组a过滤筛运动,链轮组c转动带动旋转分离棍转动,在旋转分离棍与过滤筛运动作用下草料与马粪被分开。分离了马粪与草料可以后续继续利用马粪与草料。
14.5.链轮组a带动传送带b转动,继而将传送带b上的马粪运输到马粪放置箱中,分离运输。
15.6.分离传送带上的草料运输到抖动分离机构中,抖动分离机构运动将抖动分离机构中的草料进行二次分离,草运到干草放置箱中,马粪运到马粪放置箱中。这样一次性辅助的清理并将马厩内部的草料与马粪进行分离,节约了人力,提高了工作效率。
附图说明
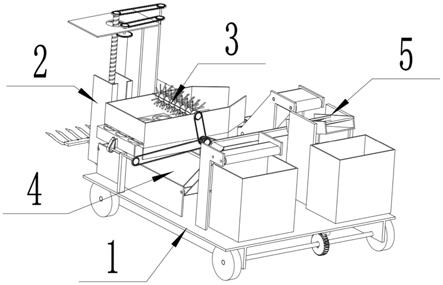
16.图1
‑
3为本发明的整体结构示意图。
17.图4
‑
5为本发明的整体移动部结构示意图。
18.图6
‑
9为本发明的清理部结构示意图。
19.图10
‑
11为本发明的一次分离部结构示意图。
20.图12为本发明的传送部结构示意图。
21.图13
‑
14为本发明的二次分离传送部结构示意图。
22.附图标号:1
‑
整体移动部;2
‑
清理部;3
‑
一次分离部;4
‑
传送部;5
‑
二次分离传送部;101
‑
固定底板;102
‑
电机;103
‑
链轮组a;104
‑
控制齿轮a;105
‑
齿轮a;106
‑
蜗轮组a;107
‑
移动轮;201
‑
齿轮支撑板;202
‑
叉子;203
‑
叉子移动支撑板;204
‑
前进机构;205
‑
升降旋转机构;206
‑
清理部动力齿轮组;207
‑
上旋转齿轮组;208
‑
上叉子翻转齿轮组;209
‑
控制齿轮b;210
‑
齿轮b;211
‑
下叉子翻转控制齿轮组;212
‑
蜗轮组b;213
‑
叉子翻转控制机构;301
‑
分离放置盒;302
‑
旋转分离棍;303
‑
过滤筛;304
‑
过滤筛移动控制齿轮组;305
‑
链轮组b;306
‑
链轮组c;307
‑
传送带a;401
‑
传送带b;402
‑
传送支撑板;403
‑
蜗轮组c;404
‑
链轮组d;501
‑
分离传送支撑板;502
‑
分离传送带;503
‑
抖动分离机构;504
‑
干草放置箱;505
‑
马粪放置箱;506
‑
蜗轮组d;507
‑
链轮组e;508
‑
移动传送机构;509
‑
蜗轮组e;510
‑
链轮组f。
具体实施例
23.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
24.在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
25.实施例如图1
‑
14所示,一种马厩辅助清理机器人,包括整体移动部1、清理部2、一次分离部3、传送部4、二次分离传送部5;整体移动部1为可移动的主体,整体移动部1包括固定底板101;清理部2将马厩中的杂物叉起放到一次分离部3中;清理部2包括齿轮支撑板
201、叉子移动支撑板203、前进机构204;齿轮支撑板201下端固定安装在固定底板101的一侧凸出位置;叉子202后端下部固定安装在前进机构204的前端;前进机构204活动安装在固定底板101上;一次分离部3将清理部2运输过来的杂物进行分离;一次分离部3包括:分离放置盒301;分离放置盒301下端的固定板固定安装在固定底板101上;传送部4将一次分离部3分离出的马粪运输到马粪放置箱505中;传送部4的固定板下端固定安装在固定底板101上;二次分离传送部5将一次分离部3分离并运输出的草料运输到抖动分离机构503中并进行清理部2二次分离,并将分离后的草料运输到干草放置箱504中,分离出的马粪运输到传送带b401上,并经过传送带b401运输到马粪放置箱505中;整体移动部1将设备运输到指定位置,清理部2将杂物运输到一次分离部3中,一次分离部3将其过滤并分开运输,传送部4将马粪运输到马粪放置箱505中,二次分离传送部5将一次分离部3运输的进行二次分离,并分开运输到干草放置箱504与马粪放置箱505中;这样实现了马厩的辅助清理机分离,节约了清理马厩需要的人力。
26.本发明实施列的一个可选实施方式中,除与上一个实施例相同的零件外,整体移动部1还包括: 电机102、链轮组a103、控制齿轮a104、齿轮a105、蜗轮组a106、移动轮107;.电机102固定安装在固定底板101的中部;链轮组a103一端的齿轮固定安装在电机102的轴上;控制齿轮a104活动安装在链轮组a103中部齿轮的轴上;齿轮a105固定安装在蜗轮组a106杆的末端;移动轮107分为两部分;蜗轮组a106轮固定安装在移动轮107一部分的轴上;移动轮107的轴活动安装在固定底板101下端的固定块的孔中;具体地,启动电机102, 电机102带动链轮组a103转动继而带动控制齿轮a104转动,调整控制齿轮a104位置使控制齿轮a104与齿轮a105啮合,控制齿轮a104带动齿轮a105转动,继而带动蜗轮组a106转动,从而带动移动轮107转动,继而使设备移动到指定位置。通过控制齿轮来调整设备整体移动不用电机的启动与停止来控制设备的移动,节省了电机的放置。
27.本发明实施列的一个可选实施方式中,除与上一个实施例相同的零件外,清理部2还包括:叉子202、升降旋转机构205、清理部动力齿轮组206、上旋转齿轮组207、上叉子翻转齿轮组208、控制齿轮b209、齿轮b210、下叉子翻转控制齿轮组211、蜗轮组b212、叉子翻转控制机构213;叉子202后端活动安装在升降旋转机构205的下部;升降旋转机构205下部活动安装在叉子移动支撑板203上,升降旋转机构205上端活动安装在齿轮支撑板201上端;清理部动力齿轮组206左端齿轮的轴活动安装在固定底板101上的固定块的孔中,清理部动力齿轮组206右端齿轮固定安装在链轮组a103右端齿轮的轴的中部;上旋转齿轮组207左端的轴活动安装在齿轮支撑板201上端挡板的下部,上旋转齿轮组207有端的轴的下端活动安装在固定底板101上;上叉子翻转齿轮组208左侧的轴活动安装在齿轮支撑板201上挡板的孔中,上叉子翻转齿轮组208右侧的轴下端活动安装在固定底板101上;控制齿轮b209轴的下端活动安装在固定底板101上;齿轮b210固定安装在蜗轮组b212杆的末端;下叉子翻转控制齿轮组211轴的下端固定安装在固定底板101上;蜗轮组b212的轮固定安装在控制齿轮b209轴的下部;叉子翻转控制机构213下端活动安装在叉子202后端的固定板上,叉子翻转控制机构213上端右侧齿轮得我轴固定安装在叉子移动支撑板203上;通过各种控制齿轮来控制叉子的工作实现了模拟人工运用叉子的动作。具体地,链轮组a103带动清理部动力齿轮组206转动,调整清理部动力齿轮组206上控制齿轮位置使其与齿轮b210啮合,清理部动力齿轮组
206带动齿轮b210转动,继而带动叉子翻转控制机构213转动,从而带动控制齿轮b209转动,调整控制齿轮b209位置使其与上旋转齿轮组207啮合,控制齿轮b209带动上旋转齿轮组207转动继而带动下叉子翻转控制齿轮组211转动,从而带动叉子翻转控制机构213移动,继而带动叉子202倾斜到一定角度。
28.调整清理部动力齿轮组206上控制齿轮位置使清理部动力齿轮组206与前进机构204啮合,清理部动力齿轮组206带动前进机构204转动,继而带动叉子移动支撑板203移动,从而带动升降旋转机构205与叉子202移动一定位置后停止。叉子202回到水平位置;清理部动力齿轮组206与齿轮b210啮合,调整控制齿轮b209位置使控制齿轮b209与升降旋转机构205啮合,控制齿轮b209带动升降旋转机构205转动继而带动升降旋转机构205移动,从而带动叉子202移动到指定位置。使升降旋转机构205上的齿轮与上叉子翻转齿轮组208啮合。前进机构204带动升降旋转机构205与叉子202回到原位;调整控制齿轮b209位置使控制齿轮b209与上叉子翻转齿轮组208啮合,控制齿轮b209带动上叉子翻转齿轮组208转动,继而带动升降旋转机构205转动,从而使叉子202旋转到分离放置盒301上方,同时叉子翻转控制机构213的左齿轮与上旋转齿轮组207上端的齿轮啮合。调整控制齿轮b209位置使控制齿轮b209与上旋转齿轮组207啮合,控制齿轮b209带动上旋转齿轮组207转动,继而带动叉子翻转控制机构213移动,从而带动叉子202翻转,继而使叉子202上的杂物掉落到分离放置盒301中。然后装置回到原位继续下一次运动。
29.本发明实施列的一个可选实施方式中,除与上一个实施例相同的零件外,一次分离部3还包括:旋转分离棍302、过滤筛303、过滤筛移动控制齿轮组304、链轮组b305、链轮组c306、传送带a307;旋转分离棍302两端转动安装在分离放置盒301上端的孔中;过滤筛303滑动安装在分离放置盒301左侧的孔中;过滤筛移动控制齿轮组304一端齿轮固定安装在链轮组b305右端齿轮轴的右侧,过滤筛移动控制齿轮组304另一端的齿轮连接的凸轮滑动安装在过滤筛303中部的固定块中间;链轮组b305左端齿轮固定安装在链轮组a103右端齿轮的轴的前端;链轮组c306下端齿轮固定安装在链轮组b305右端齿轮的轴的左侧,链轮组c306上端齿轮固定安装在旋转分离棍302轴的右端;传送带a307右侧的轴的右端固定安装在链轮组b305右端齿轮的轴的左侧;传送带a307的轴活动安装在分离放置盒301下端的左侧板的孔中;通过旋转分离棍302将草料分离,通过过滤筛303的抖动将马粪分离出来;具体地,链轮组a103带动链轮组b305转动继而带动过滤筛移动控制齿轮组304与链轮组c306转动,过滤筛移动控制齿轮组304转动带动过滤筛303运动,链轮组c306转动带动旋转分离棍302转动,在旋转分离棍302与过滤筛303运动作用下草料与马粪被分开,马粪从过滤筛303的孔中落入传送带b401上,草料经旋转分离棍302运输到传送带a307上,链轮组c306带动传送带a307转动,继而带动草料运输到分离传送带502上。
30.本发明实施列的一个可选实施方式中,除与上一个实施例相同的零件外,传送部4包括:传送带b401、传送支撑板402、蜗轮组c403、链轮组d404;传送带b401的轴转动安装在传送支撑板402上端的孔中;传送支撑板402的下端固定安装在固定底板101上;蜗轮组c403的轮固定安装在传送带b401中部的轴的右端,蜗轮组c403的杆固定安装有链轮组d404左端的齿轮,蜗轮组c403杆的中部活动安装在移动传送机构508传送带支撑板的孔中;链轮组d404右端的齿轮固定安装在链轮组a103右的齿轮的轴
的前端;具体地,链轮组a103带动链轮组d404转动继而带动蜗轮组c403转动,从而带动传送带b401转动,继而将传送带b401上的马粪运输到马粪放置箱505中。
31.本发明实施列的一个可选实施方式中,除与上一个实施例相同的零件外,二次分离传送部5包括:分离传送支撑板501、分离传送带502、抖动分离机构503、干草放置箱504、马粪放置箱505、蜗轮组d506、链轮组e507、移动传送机构508、蜗轮组e509、链轮组f510;分离传送支撑板501下端固定安装在固定底板101的上端,分离传送支撑板501上端的孔中转动安装有分离传送带502的轴;抖动分离机构503中部的轴滑动安装在固定底板101上的固定板的凹槽中;干草放置箱504与马粪放置箱505分别放置在固定底板101的前后两端;蜗轮组d506的轮固定安装在分离传送带502一端轴的后面,蜗轮组d506的杆固定安装在链轮组e507一侧齿轮上;链轮组e507另一侧齿轮固定安在链轮组a103右侧齿轮轴的左侧末端;移动传送机构508一侧齿轮固定安装在抖动分离机构503右侧齿轮轴的中部,移动传送机构508的传送带的轴活动安装在固定底板101上的固定板上得孔中;蜗轮组e509的杆固定安装在链轮组a103右端齿轮的右侧,蜗轮组e509的轮固定安装在链轮组f510下端齿轮的轴上;链轮组f510上端的凸轮滑动安装在抖动分离机构503下端挡板的固定块的中间;二次分离后将马粪与草料单独放置到指定位置;具体地,链轮组a103带动链轮组e507、移动传送机构508、蜗轮组e509转动,链轮组e507带动蜗轮组d506转继而将分离传送带502上的草料运输到抖动分离机构503中,蜗轮组e509带动链轮组f510转动继而带动抖动分离机构503运动从而将抖动分离机构503中的草料进行二次分离,分离出的草运输到干草放置箱504中,分离出的马粪运输到移动传送机构508的传送带上,移动传送机构508将马粪运输到传送带b401,和一次分离出的马粪一起运输到马粪放置箱505中。
32.工作原理:当需要清理马厩时使用本设备,首先将马厩中的杂物集中在一起,然后启动电机102, 电机102带动链轮组a103转动继而带动控制齿轮a104转动,调整控制齿轮a104位置使控制齿轮a104与齿轮a105啮合,控制齿轮a104带动齿轮a105转动,继而带动蜗轮组a106转动,从而带动移动轮107转动,继而使设备移动到指定位置后停止;链轮组a103带动清理部动力齿轮组206转动,调整清理部动力齿轮组206上控制齿轮位置使其与齿轮b210啮合,清理部动力齿轮组206带动齿轮b210转动,继而带动叉子翻转控制机构213转动,从而带动控制齿轮b209转动,调整控制齿轮b209位置使其与上旋转齿轮组207啮合,控制齿轮b209带动上旋转齿轮组207转动继而带动下叉子翻转控制齿轮组211转动,从而带动叉子翻转控制机构213移动,继而带动叉子202倾斜到一定角度。
33.调整清理部动力齿轮组206上控制齿轮位置使清理部动力齿轮组206与前进机构204啮合,清理部动力齿轮组206带动前进机构204转动,继而带动叉子移动支撑板203移动,从而带动升降旋转机构205与叉子202移动一定位置后停止。叉子202回到水平位置;清理部动力齿轮组206与齿轮b210啮合,调整控制齿轮b209位置使控制齿轮b209与升降旋转机构205啮合,控制齿轮b209带动升降旋转机构205转动继而带动升降旋转机构205移动,从而带动叉子202移动到指定位置。使升降旋转机构205上的齿轮与上叉子翻转齿轮组208啮合。前进机构204带动升降旋转机构205与叉子202回到原位;调整控制齿轮b209位置使控制齿轮b209与上叉子翻转齿轮组208啮合,控制齿轮b209带动上叉子翻转齿轮组208转动,继而带动升降旋转机构205转动,从而使叉子202旋转到分离放置盒301上方,同时叉子翻转控制机构213的左齿轮与上旋转齿轮组207上端的齿
轮啮合。调整控制齿轮b209位置使控制齿轮b209与上旋转齿轮组207啮合,控制齿轮b209带动上旋转齿轮组207转动,继而带动叉子翻转控制机构213移动,从而带动叉子202翻转,继而使叉子202上的杂物掉落到分离放置盒301中。然后装置回到原位继续下一次运动;链轮组a103带动链轮组b305转动继而带动过滤筛移动控制齿轮组304与链轮组c306转动,过滤筛移动控制齿轮组304转动带动过滤筛303运动,链轮组c306转动带动旋转分离棍302转动,在旋转分离棍302与过滤筛303运动作用下草料与马粪被分开,马粪从过滤筛303的孔中落入传送带b401上,草料经旋转分离棍302运输到传送带a307上,链轮组c306带动传送带a307转动,继而带动草料运输到分离传送带502上;链轮组a103带动链轮组d404转动继而带动蜗轮组c403转动,从而带动传送带b401转动,继而将传送带b401上的马粪运输到马粪放置箱505中;链轮组a103带动链轮组e507、移动传送机构508、蜗轮组e509转动,链轮组e507带动蜗轮组d506转继而将分离传送带502上的草料运输到抖动分离机构503中,蜗轮组e509带动链轮组f510转动继而带动抖动分离机构503运动从而将抖动分离机构503中的草料进行二次分离,分离出的草运输到干草放置箱504中,分离出的马粪运输到移动传送机构508的传送带上,移动传送机构508将马粪运输到传送带b401,和一次分离出的马粪一起运输到马粪放置箱505中。这样一次性辅助的清理并将马厩内部的草料与马粪进行分离,节约了人力,提高了工作效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

