1.本发明涉及一种饲养器,尤其涉及一种养猪智能饲养器。
背景技术:
2.目前大多数智能饲养器都是采用螺旋绞龙(主动轴和螺旋进料片)对饲料进行进料,如公开号为cn105850763b的发明专利公开了一种自动喂料器,喂料管在猪咬嚼其上的咬嚼块时输出饲料,咬嚼块被咬嚼时将触发压力传感器;料斗用于装填饲料干料;螺旋绞龙一端与电机连接,其另一端位于喂料管中,螺旋绞龙用于将料斗中饲料干料送至喂料管处;电机为螺旋绞龙旋转提供动力;送水管路为喂料管中的饲料干料提供水进行饲料混合;控制单元接收到压力传感器触发信号后,同时开启电机和送水管路,控制单元未接收到压力传感器触发信号时,则关闭电机和送水管路。
3.但是螺旋绞龙每次进料都会有饲料残渣粘附在螺旋绞龙的螺旋进料片上,饲料残渣过久了会滋生细菌和发臭,若不及时清洗则会混入下次喂养的饲料中,会导致猪吃了变质的饲料生病影响正常生长,但是每次清洗螺旋绞龙都必须拆下外壳才能清洗,这样十分的繁琐,且每头猪都专用一个智能饲养器,若要对所有的智能饲养器的螺旋绞龙进行清洗,则工作量十分的巨大。
技术实现要素:
4.为了克服现有技术存在的缺点,本发明提供一种养猪智能饲养器,能够根据猪的生长曲线控制对猪的喂养,且螺旋通道内设置有擦拭机构,擦拭机构能够在不拆卸智能饲养器外壳的前提下将粘附在螺旋通道内壁饲料残渣清除。
5.为达此目的,本发明采用以下技术方案:
6.本发明提供了一种养猪智能饲养器,包括:
7.主动轴,所述智能饲养器内的设置有所述主动轴;
8.螺旋进料片,所述主动轴外圆柱面上沿其轴线方向螺旋前进设置有所述螺旋进料片,所述主动轴和所述螺旋进料片组成螺旋绞龙,所述螺旋绞龙与所述主机外壳内壁之间形成一个螺旋通道,所述螺旋通道从所述进料口处延伸到所述出料口处;
9.擦拭机构,所述螺旋通道内设置有所述擦拭机构,所述擦拭机构的外壁与所述螺旋通道的内壁相抵,所述擦拭机构能够沿所述螺旋通道移动将粘附在所述螺旋通道内壁饲料残渣清除。
10.进一步地,所述擦拭机构包括擦拭块、滑杆和副轴,所述主动轴为一圆管,所述主动轴靠近所述端盖的一端穿过所述端盖且位于所述电机外壳外,所述主动轴外圆柱壁上沿着所述螺旋通道前进方向开设有螺旋槽,所述螺旋槽从所述主动轴一端延伸到另一端且为通槽,所述副轴滑动连接在所述主动轴内,所述副轴一侧开设有直线型滑槽,所述滑槽沿所述副轴轴线方向上的长度大于或等于所述螺旋槽沿所述主动轴轴线方向上的长度,所述擦拭块设置在螺旋通道且所述擦拭块的外壁与所述螺旋通道的内壁相抵,所述滑杆靠近所述
主动轴轴线方向的一端滑动连接在所述滑槽内,所述滑杆远离所述主动轴轴线方向的一端穿过所述螺旋槽与所述擦拭块相连,所述滑杆与所述螺旋槽为滑动配合;
11.所述副轴的转动,通过所述滑槽、所述螺旋槽和所述滑杆的配额和,能够带动所述滑杆沿所述螺旋槽移动,而带动所述擦拭块沿螺旋通道移动,进而对粘附在所述螺旋通道内壁饲料残渣进行清除。
12.进一步地,还包括有进入管和出去管,所述擦拭块为一收缩囊且其内含有一囊腔,所述滑杆内开设有进入通道和出去通道,所述进入通道一端穿出所述滑杆与所述囊腔相连通,所述进入通道另一端穿出滑杆与所述副轴内相连通,所述出去通道一端穿出所述滑杆与所述囊腔相连通,所述出去通道另一端穿出滑杆与所述副轴内相连通,所述进入管和所述出去管位于所述副轴内,所述进入管一端与所述进入通道相连通,所述进入管另一端与外界的输入泵相连,所述出去管一端与所述出去通道相连通,所述出去管另一端与外界的输出泵相连;
13.所述输入泵输入介质到所述囊腔内使得所述收缩囊膨胀与所述螺旋通道的内壁相抵,而具有所述粘附在所述螺旋通道内壁饲料残渣进行刮除的功能;
14.所述输出泵将所述囊腔内的介质输出使得所述收缩囊收缩,将所述收缩囊收起而不影响所述螺旋绞龙的转动。
15.进一步地,所述主动轴靠近所述驱动电机的一端开设有第一进出口,所述第一进出口为一通孔,所述第一进出口开设在所述螺旋槽的路径上,所述副轴为一圆管,所述滑槽为通槽,所述副轴靠近所述驱动电机的一端开设有第二进出口,所述第二进出口开设在所述滑槽的路径上,所述第二进出口到所述驱动电机的直线距离等于所述第一进出口到所述驱动电机的直线距离;
16.所述第一进出口和所述第二进出口重合后供收缩的收缩囊通过。
17.进一步地,所述第二进出口的大小大于所述第一进出口的大小。
18.进一步地,所述收缩囊为气囊或液压囊。
19.进一步地,所述收缩囊为气囊且所述囊腔内含有振动粒。
20.进一步地,所述滑杆包括头部滑动杆和尾部圆块,所述头部滑动杆穿过所述螺旋槽和所述滑槽,所述滑动杆远离所述主动轴的轴线方向的一端位于所述收缩囊内,所述滑动杆靠近所述主动轴的轴线方向的一端与所述尾部圆块相连,所述尾部圆位于所述副轴内。
21.进一步地,所述进入通道和所述出去通道均位于所述头部滑动杆内,所述尾部圆块内开设有进气腔和出气腔,所述进入通道靠近所述尾部圆块的一端与所述进气腔相连通,所述进气腔与所述进入管靠近所述滑杆的一端相连通,所述出去通道靠近所述尾部圆块的一端与所述出气腔相连通,所述出气腔与所述出去管靠近所述滑杆的一端相连通,所述进气腔的横截面积大于所述进入通道的横截面积,所述出气腔的横截面积大于所述出去通道的横截面积。
22.进一步地,所述智能饲养器还包括:
23.主机外壳;
24.进料口,所述主机外壳一端上侧设置有所述进料口;
25.出料口,所述主机外壳另一端下侧设置有所述出料口;
26.端盖,所述主机外壳靠近所述出料口的一端设置有所述端盖;
27.电机外壳,所述主机外壳靠近所述进料口的一端设置有所述电机外壳;
28.驱动电机,所述电机外壳内设置有所述驱动电机;
29.所述主机外壳内的轴线上设置有所述主动轴,所述主动轴一端与所述驱动电机相连,所述主动轴另一端与所述端盖转动配合,所述驱动电机能够驱动所述主动轴转动。
30.本发明的有益效果为:当螺旋绞龙一次饲料进料完毕后,转动擦拭机构,使得擦拭机构沿螺旋通道从进料口移动到出料口,将粘附在螺旋通道内壁饲料残渣扫除到出料口处而掉落到猪的食槽内,清除了粘附在螺旋通道内壁饲料残渣而且节约了饲料,实现了不拆卸智能饲养器的外壳就能将粘附在螺旋通道内壁饲料残渣清除。
附图说明
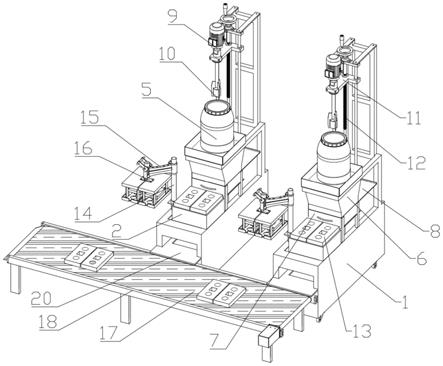
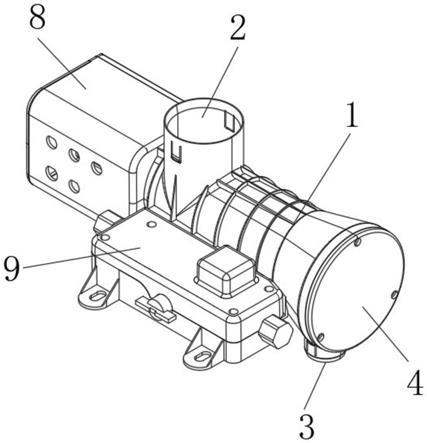
31.图1为本实施例智能饲养器的结构示意图。
32.图2为本实施例智能饲养器的剖视图。
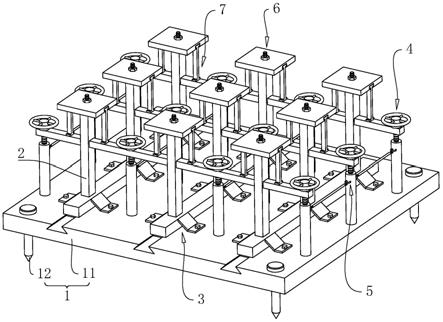
33.图3为本实施例主机外壳的结构示意图。
34.图4为本实施例主动轴和副轴的配合示意图。
35.图5为本实施例副轴和擦拭块的配合示意图。
36.图6为图5的剖视图。
37.图7为本实施例滑杆的剖视示意图。
38.其中,上述附图包括以下附图标记:1、主机外壳,2、进料口,3、出料口,4、端盖,5、电机外壳,6、主动轴,601、螺旋槽,602、第一进出口,7、螺旋进料片,8、驱动电机,9、侧边外壳,10、一体式流量磁阀,11、调节开关,12、副轴,1201、滑槽,1202、第二进出口,13、滑杆,14、擦拭块,15、头部滑动杆,1501、进入通道,1502、出去通道,16、尾部圆块,1601、进气腔,1602、出气腔,17、进入管,18、出去管、19、振动粒。
具体实施方式
39.现在将参照附图在下文中更全面地描述本发明,在附图中示出了本发明当前优选的实施方式。然而,本发明可以以许多不同的形式实施,并且不应被解释为限于本文所阐述的实施方式;而是为了透彻性和完整性而提供这些实施方式,并且这些实施方式将本发明的范围充分地传达给技术人员。
40.如图1
‑
7所示,一种养猪智能饲养器,包括主机外壳1、进料口2、出料口3、端盖4、电机外壳5、驱动电机8、主动轴6、螺旋进料片7和擦拭机构,主机外壳1一端上侧设置有进料口2;主机外壳1另一端下侧设置有出料口3;主机外壳1靠近出料口3的一端设置有端盖4;主机外壳1靠近进料口2的一端设置有电机外壳5;电机外壳5内设置有驱动电机8;主机外壳1内的轴线上设置有主动轴6,主动轴6一端与驱动电机8相连,主动轴6另一端与端盖4转动配合,驱动电机8能够驱动主动轴6转动;主动轴6外圆柱面上沿其轴线方向螺旋前进设置有螺旋进料片7,主动轴6和螺旋进料片7组成螺旋绞龙,螺旋绞龙与主机外壳1内壁之间形成一个螺旋通道,螺旋通道从进料口2处延伸到出料口3处;螺旋通道内设置有擦拭机构,擦拭机构的外壁与螺旋通道的内壁相抵,擦拭机构能够沿螺旋通道移动将粘附在螺旋通道内壁饲料残渣清除。
41.饲料从进料口2进入螺旋通道内,驱动电机8启动,驱动螺旋绞龙转动带动饲料往出料口3处移动,进而使得饲料从出料口3运送到猪的食槽内,利用螺旋绞龙对塑料进行精准进料,精准的控制了饲料的进料量(投放量),避免了饲料的浪费。
42.在本实施例中,当螺旋绞龙一次饲料进料完毕后,转动擦拭机构,使得擦拭机构沿螺旋通道从进料口2移动到出料口3,将粘附在螺旋通道内壁饲料残渣扫除到出料口3处而掉落到猪的食槽内,清除了粘附在螺旋通道内壁饲料残渣而且节约了饲料,实现了不拆卸智能饲养器的外壳就能将粘附在螺旋通道内壁饲料残渣清除。
43.进一步地,擦拭机构包括擦拭块14、滑杆13和副轴12,主动轴6为一圆管,主动轴6靠近端盖4的一端穿过端盖4且位于电机外壳5外,主动轴6外圆柱壁上沿螺旋通道前进方向开设有螺旋槽601,螺旋槽601从主动轴6一端延伸到另一端且为通槽,副轴12从主动轴6位于电机外壳5外的端口处插入主动轴6内,且,副轴12外壁与主动轴6内壁为滑动配合,主动轴6一侧开设有直线型滑槽1201,滑槽1201沿主动轴6轴线方向上的长度大于或等于螺旋槽601沿主动轴6轴线方向上的长度,擦拭块14设置在螺旋通道之间且擦拭块14的外壁与螺旋通道的内壁相抵,滑杆13靠近主动轴6轴线方向的一端位于滑槽1201内且与滑槽1201滑动配合,滑杆13远离主动轴6轴线方向的一端穿过螺旋槽601与擦拭块14相连,滑杆13与螺旋槽601为滑动配合。
44.在本实施例中,当螺旋绞龙一次饲料进料完毕后,启动副轴12转动,由于滑杆13是设置在直线型滑槽1201内的,副轴12转动会带动滑杆13绕副轴12转轴转动,由于滑杆13还穿过螺旋槽601且与滑动配和,滑杆13在螺旋槽601的导向下会沿着螺旋槽601移动,进而带动擦拭块14沿螺旋通道往出料口3处移动,进而把粘附在螺旋通道内壁饲料残渣刮除携带到出料口3处而掉落进食槽内,不但清除了螺旋通道内的饲料残渣,而且还将饲料残渣被及时排入到食槽内被猪进食掉,节约了饲料。
45.在本实施例中,副轴12从主动轴6位于电机外壳5外的端口处插入主动轴6内,从而使得副轴12的转动可以由智能饲养器外部的电机控制转动,避免和螺旋绞龙使用同一个电机而增加智能饲养器结构的复杂性,且,副轴12外壁与主动轴6内壁为滑动配合,避免主动轴6转动而带动副轴12转动。
46.进一步地,还包括有进入管17和出去管18,主动轴6靠近驱动电机8的一端开设有第一进出口602,第一进出口602为一通孔,第一进出口602开设在螺旋槽601的路径上,副轴12为一圆管,滑槽1201为通槽,副轴12靠近驱动电机8的一端开设有第二进出口1202,第二进出口1202开设在滑槽1201的路径上,第二进出口1202到驱动电机8的直线距离等于第一进出口602到驱动电机8的直线距离,第一进出口602和第二进出口1202位于靠近驱动电机8处的主机外壳1内,擦拭块14为一收缩囊且其内含有一囊腔,滑杆13内开设有进入通道1501和出去通道1502,进入通道1501一端穿出滑杆13与囊腔相连通,进入通道1501另一端穿出滑杆13与副轴12内相连通,出去通道1502一端穿出滑杆13与囊腔相连通,出去通道1502另一端穿出滑杆13与副轴12内相连通,进入管17和出去管18位于副轴12内,进入管17靠近滑杆13的一端与进入通道1501位于副轴12内的一端相连通,进入管17另一端从副轴12远离驱动电机8的端口穿出与外界的输入泵相连,出去管18靠近滑杆13的一端与出去通道1502位于副轴12内的一端相连通,出去管18另一端从副轴12远离驱动电机8的端口穿出与外界的输出泵相连。
47.在使用擦拭机构时,擦拭块14为一收缩囊且收缩包裹在滑杆13上,将主动轴6和副轴12分别转动,使得第一进出口602与第二进出口1202重合,将滑杆13穿过第二进出口1202和第一进出口602进入螺旋通道内,输入泵输入介质到囊腔内使得收缩囊膨胀与螺旋通道的内壁相抵,之后转动副轴12使得擦拭块14沿沿螺旋通道往出料口3处移动,进而把粘附在螺旋通道内壁饲料残渣刮除携带到出料口3处而掉落进食槽内;
48.当擦拭块14刮除粘附在螺旋通道内壁饲料残渣完毕时,输出泵将囊腔内的介质输出使得收缩囊收缩,使得收缩囊重新收缩包裹在滑杆13上,反转副轴12使得滑杆13移动到第一进出口602处,这时第二进出口1202和第一进出口602重合,将滑杆13通过第二进出口1202从螺旋通道内取出,进而防止滑杆13对主动轴6的转动造成干涉。
49.进一步地,第二进出口1202的大小大于第一进出口602的大小,方便滑杆13的进出。
50.在一个实施例中,第二进出口1202为具有容纳腔的通槽,带收缩囊的滑杆13通过第二进出口1202从螺旋通道内取出时,带收缩囊的滑杆13可以收纳在第二进出口1202的容纳腔内,而不必整个将带收缩囊的滑杆13取出,这是为了方便下次的清理,操作更加方便。
51.进一步地,收缩囊为气囊或液压囊。
52.进一步地,收缩囊为气囊且囊腔内含有振动粒19。
53.在本实施例中,收缩囊优选为气囊,气囊质量轻,轻便且便于移动,囊腔内含有振动粒19,当收缩囊从螺旋通道内刮除饲料残渣移动到出料口3出,输入泵可以加速向气囊内通入气体,输出泵输出气体,气体在气囊内循环流动,进而带动振动粒19在气囊内翻转碰撞气囊内壁,从而使得气囊振动,进而使得收缩囊在刮除饲料残渣而粘附在收缩囊外壁的饲料残渣在其振动的作用下脱落下来,避免收饲料残渣积累在擦拭块14上,同时也避免了擦拭块14在复位过程中将自身携带的饲料残渣撒落在螺旋通道内,进一步清楚了螺旋通道内的饲料残渣。
54.进一步地,滑杆13包括头部滑动杆15和尾部圆块16,头部滑动杆15穿过螺旋槽601和滑槽1201,滑动杆远离主动轴6的轴线方向的一端位于收缩囊内,滑动杆靠近主动轴6的轴线方向的一端与尾部圆块16相连,尾部圆位块于副轴12内,尾部圆位块大于滑动杆,尾部圆位块起到限位的作用。
55.进一步地,进入通道1501和出去通道1502均位于头部滑动杆15内,尾部圆块16内开设有进气腔1601和出气腔1602,进入通道1501靠近尾部圆块16的一端与进气腔1601相连通,进气腔1601与进入管17靠近滑杆13的一端相连通,出去通道1502靠近尾部圆块16的一端与出气腔1602相连通,出气腔1602与出去管18靠近滑杆13的一端相连通,进气腔1601的横截面积大于进入通道1501的横截面积,出气腔1602的横截面积大于出去通道1502的横截面积。
56.在本实施例中,进气腔1601的横截面积大于进入通道1501的横截面积,出气腔1602的横截面积大于出去通道1502的横截面积,这样使得进入通道1501和出去通道1502内的气流流速大于进入管17和出入管的流速,加速气囊内气流循环流动,从而加大振动粒19对气囊内壁的碰撞,进而加大收缩囊的振动程度。
57.进一步地,还包括有一体式流量磁阀10和调节开关11及侧边外壳9,侧边外壳9设置在电机外壳5一侧,一体式流量磁阀10和调节开关11均设置在侧边外壳9内,调节开关11
设置在一体式流量磁阀10上,调节开关11用于控制一体式流量磁阀10的开关。
58.在本实施例中,当在水流不畅时,手动打开此开关后使水流通过此通道临时输出至用水处,从而给猪喂养水。
59.进一步地,还包括有控制面板和称重器,称重器用于检测猪的重量,控制面板能够根据检测到的猪的重量和猪的生长曲线控制智能饲养器对猪的喂养。
60.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。