1.本实用新型涉及插秧机领域,特别涉及一插秧机和其插秧机控制系统。
背景技术:
2.随着农业机械化程度的提高,插秧机被广泛应用农业生产中,逐渐取代人工插秧的作业模式,不仅改善了农户们的作业环境和劳动强度,而且提高了作业效率。因此,插秧机的普及程度也越来越高。
3.然而,目前市面上的插秧机的电气化水平较低,比如说目前市面上销量和市场保有量都最多的久保田高速插秧机,插秧机的前进、后退、加速、减速、转弯、插秧机的插植机构的上升和下降等每个动作都分别对应一个独立的操作杆,操作复杂,增加了驾驶人员控制插秧机进行插植作业的作业难度。此外,高速插秧机的发动机声音较大,驾驶人员需要在噪音嘈杂的环境中进行繁琐的作业,而且插秧季节的工作量较大,工作环境恶劣,劳动强度较大。另外,现有的插秧机依赖驾驶人员人工地控制秧苗的行距,难以保障秧苗的数量和间距的合理性,不利于秧苗的成长和科学管理。虽然市场上出现了辅助直线的技术,但是驾驶人员还是需要一直在驾驶位上,不能离开,而且经常驾驶人员在操作操作杆时,插秧机需要先停下,降低了插秧机的作业效率。
技术实现要素:
4.本实用新型的一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统通过对插秧机进行电气化改造,将驾驶人员操作频率较高的几个动作进行电控化和集成化,提高了所述插秧机的电气化程度,改善了驾驶人员的作业环境,降低了驾驶人员的作业强度。
5.本实用新型的另一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统包括一控制手柄和一行驶控制单元,所述控制手柄能够控制所述行驶单元,进而控制插秧机的行驶方向和加减速等,简化了驾驶人员的作业难度。
6.本实用新型的另一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统的行驶控制单元包括一手柄位置检测元件、一hst状态检测元件以及一hst控制电机,所述手柄位置检测元件检测所述控制手柄的位置,所述电机根据所述控制手柄的位置控制插秧机的液压传动装置到达对应的位置,进而实现插秧机的前进、后退、加速、减速等。
7.本实用新型的另一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统包括一插植控制单元,所述控制手柄能够控制所述插植控制单元,进而利用所述控制手柄控制插秧机的一插植机构的上升和下降,提高了所述插秧机的电气化程度。
8.本实用新型的另一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统的所述插植控制单元包括一液压阀状态检测元件和一液压阀控制电机,其中所述液压阀控制电机根据所述控制手柄的操作指令控制所述插秧机的液压阀到达对应的状
态,进而所述液压阀能够驱动所述插秧机的插植机构实现上升下降等作业。
9.本实用新型的另一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统包括一插植机构位置检测元件,其中所述插植机构位置检测元件检测所述插植机构的运动位置,并在所述插植机构到达预设位置时,所述液压阀控制电机根据所述插植机构位置检测元件反馈的信息控制所述液压阀的状态,进而保持所述插植机构于所述预设位置。
10.本实用新型的另一个目的在于提供一插秧机和其插秧机控制系统,其中所述插秧机控制系统进一步包括一转向角度控制单元,其中所述转向角度控制单元能够实时地检测所述插秧机的轮胎的方向,便于驾驶人员更好地控制所述插秧机的行驶。
11.依本实用新型的一个方面,本实用新型进一步提供一插秧机控制系统,适用于一插秧机本体,其中所述插秧机本体包括一机身主体、一行驶主体以及一插植主体,其中所述行驶主体包括一液压传动装置和被可驱动地连接于所述液压传动装置的一行驶机构,其中所述插植主体包括一液压阀和一插植机构,其中所述液压阀包括一阀主体和被可操作地连接于所述阀主体的一液压阀杆,所述插植机构被连接于所述阀主体,所述插秧机控制系统包括:
12.一控制器;
13.一控制手柄,其中所述控制手柄被可通信地连接于所述控制器;以及
14.一插植控制单元,其中所述插植控制单元被可控制地连接于所述控制器,所述插植控制单元被连接于所述插植主体的所述液压阀的所述液压阀杆。
15.根据本实用新型的一个实施例,所述插秧机控制系统进一步包括一行驶控制单元,其中所述行驶控制单元被可驱动地连接于所述控制手柄和所述控制器,所述行驶控制单元被连接于所述行驶主体的所述液压传动装置。
16.根据本实用新型的一个实施例,所述行驶控制单元包括一手柄位置检测元件、一hst状态检测元件以及一hst控制电机,其中所述手柄位置检测元件被连接于所述控制手柄,所述手柄位置检测元件检测所述控制手柄的位置,所述液压传动装置被可控制地连接于所述hst控制电机,所述hst检测元件被连接于所述 hst控制电机,其中所述hst检测元件检测所述hst控制电机的转动。
17.根据本实用新型的一个实施例,所述手柄位置检测元件被可通信地连接于所述控制器,其中所述控制器根据所述手柄位置检测元件反馈的信息控制所述hst 控制电机的转动。
18.根据本实用新型的一个实施例,所述hst状态检测元件被可通信地连接于所述控制器,其中所述控制器根据所述hst状态检测元件反馈的信息控制所述hst 控制电机的转动。
19.根据本实用新型的一个实施例,所述行驶控制单元进一步包括一手柄驱动杆、一第一安装板、一支撑架以及一第一连杆,其中所述手柄驱动杆的两端分别被连接于所述控制手柄和所述支撑架,所述支撑架被安装于所述插秧机本体的所述机身主体,所述第一安装板被固定于所述机身主体,所述第一连杆被安装于所述支撑架,所述手柄位置检测元件被连接于所述手柄位置检测元件,所述控制手柄转动时,驱动所述手柄驱动杆转动,所述手柄驱动杆带动所述第一连杆转动,进而带动所述手柄位置检测元件偏转。
20.根据本实用新型的一个实施例,所述行驶控制单元进一步包括转动板、第二安装板以及一第二连杆,其中所述hst控制电机通过所述第二安装板被安装于所述机身主体,所述转动板分别被连接于所述hst控制电机和所述液压传动装置,所述hst控制电机转动时,带动所述转动板相对所述液压传动装置转动,并调节所述液压传动装置的输出的动力大小,所述第二连杆分别被连接于所述转动板和所述hst状态检测元件,所述hst状态检测元件跟随所述转动板偏转。
21.根据本实用新型的一个实施例,所述插植控制单元包括一液压阀状态检测元件和一液压阀控制电机,其中所述液压阀控制电机被可通信地连接于所述控制器,所述插植主体的所述液压阀的所述液压阀杆被可驱动地连接于所述液压阀控制电机,所述液压阀状态检测元件检测所述液压阀杆的转动。
22.根据本实用新型的一个实施例,所述插植控制单元进一步包括一第一活动板、一第二活动板以及一第三连杆,其中所述液压阀状态检测元件和所述液压阀控制电机通过所述第二活动板被安装于所述机身主体,其中所述第一活动板被安装于所述液压阀杆,所述第三连杆的两端分别被连接于所述第一活动板和所述液压阀状态检测元件,所述液压阀控制电机带动所述第一活动板转动时,所述第一活动板带动所述液压阀的所述液压阀杆作动,同时,所述第一活动板带动所述液压阀状态检测元件偏转。
23.根据本实用新型的一个实施例,所述液压阀状态检测元件被可通信地连接于所述控制器,所述控制器根据所述液压阀状态检测元件反馈的信息控制所述液压阀控制电机转动。
24.根据本实用新型的一个实施例,所述插植控制单元进一步包括一插植位置检测元件、一第三安装板、一第四连杆以及一第五连杆,其中所述插植位置检测元件通过所述第三安装板被安装于所述机身主体,所述第五连杆的两端分别被连接于所述插植主体的所述插植机构和所述第四连杆,所述第四连杆的两端分别被连接于所述第五连杆和所述插植位置检测元件,所述插植机构在作动的过程中拉动所述第四连杆和所述第五连杆,并带动所述插植位置检测元件转动。
25.根据本实用新型的一个实施例,所述插植位置检测元件被可通信地连接于所述控制器,所述控制器根据所述插植位置检测元件反馈的信息控制所述液压阀控制电机。
26.根据本实用新型的一个实施例,所述插秧机控制系统进一步包括一转向控制单元,其中所述转向控制单元包括一转向角度检测元件、一安装座、一连接件、一驱动杆以及一转向板,其中所述安装座被安装于所述插秧机本体的所述机身主体,所述转向角度检测元件被安装于所述安装座,所述驱动杆被连接于所述转向板和所述连接件,所述连接件连接所述转向角度检测元件,所述转向板被连接于所述行驶机构的方向盘,所述行驶机构的方向盘转向时,所述行驶机构的所述方向盘带动所述转向板转动,所述转向板带动所述连接件转动,所述连接件带动所述转向角度检测元件偏转。
27.根据本实用新型的一个实施例,所述手柄位置检测元件、所述hst状态检测元件、所述液压阀状态检测元件、所述插植位置检测元件以及所述转向角度检测元件被实施为角度传感器。
28.依本实用新型的另一个方面,本实用新型进一步提供一插秧机,其包括:
29.一插秧机本体,其中所述插秧机本体包括一机身主体、一行驶主体以及一插植主
体,其中所述行驶主体包括一液压传动装置和被可驱动地连接于所述液压传动装置的一行驶机构,其中所述插植主体包括一液压阀和一插植机构,其中所述液压阀包括一阀主体和被可操作地连接于所述阀主体的一液压阀杆,所述插植机构被连接于所述阀主体;和
30.一插秧机控制系统,其中所述插秧机控制系统包括一控制器、一控制手柄以及一插植控制单元,其中所述控制手柄被可通信地连接于所述控制器,其中所述插植控制单元被可控制地连接于所述控制器,所述插植控制单元被连接于所述插植主体的所述液压阀的所述液压阀杆。
附图说明
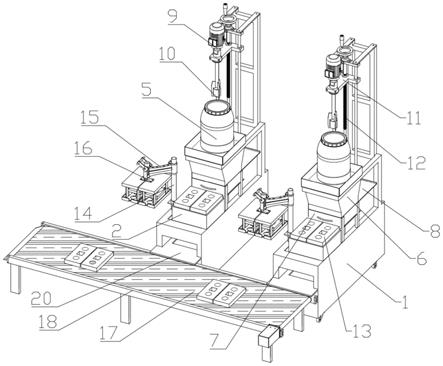
31.图1是根据本实用新型的一较佳实施例的一插秧机的立体图示意图。
32.图2是根据本实用新型的上述较佳实施例的所述插秧机的立体图示意图。
33.图3是根据本实用新型的上述较佳实施例的所述插秧机的控制系统的一控制手柄的立体图示意图。
34.图4a和图4b是根据本实用新型的上述较佳实施例的所述插秧机的控制系统的一行驶控制单元的结构图示意图。
35.图5a和图5b是根据本实用新型的上述较佳实施例的所述插秧机的控制系统的所述行驶控制单元的结构图示意图。
36.图6a和图6b是根据本实用新型的上述较佳实施例的所述插秧机的控制系统的一插植控制单元的结构图示意图。
37.图7a和图7b是根据本实用新型的上述较佳实施例的所述插秧机控制系统的所述插植控制单元的结构图示意图。
38.图8a和图8b是根据本实用新型的上述较佳实施例的所述插秧机控制系统的一转向检测单元的结构图示意图。
具体实施方式
39.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本实用新型的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本实用新型的精神和范围的其他技术方案。
40.本领域技术人员应理解的是,在本实用新型的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本实用新型的限制。
41.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
42.参照说明书图1至图8b,根据本实用新型的一较佳实施例的一插秧机1000 和其插秧机控制系统100将在接下来的描述中被阐述,其中通过对所述插秧机 1000进行电气化改
造,将驾驶人员操作频率较高的几个动作进行电控化和集成化,提高了所述插秧机1000的电气化程度,改善了驾驶人员的作业环境,降低了驾驶人员的作业强度。
43.所述插秧机1000包括所述插秧机控制系统100和一插秧机本体200,其中所述插秧机本体200包括一机身主体210、一行驶主体220以及一插植主体230,其中所述行驶主体210和所述插植主体230被安装于所述机身主体210,所述行驶主体220带动所述机身主体210和所述插植主体230运动,所述插植主体230 在所述行驶主体220行驶的过程中进行插秧作业。
44.所述行驶主体220包括一行驶机构221和一液压传动装置222,其中所述行驶机构221被可驱动地连接于所述液压传动装置222,所述液压传动装置222能够驱动所述行驶机构221运转,进而带动所述插秧机1000前进、后退加速以及减速等。优选地,所述液压传动装置222为静液压传动装置,即所述液压传动装置为功率元件和控制元件等组成的闭式油路系统,英文缩写为hst。
45.所述插植主体230包括一插植机构231和一液压阀232,其中所述液压阀232 包括阀主体和液压阀杆,所述液压阀杆被可活动地设置于所述阀主体,所述液压阀杆控制所述阀主体的工作状态,所述阀主体被连接于所述插植机构231,所述阀主体能够驱动所述插植机构231上升和下降。
46.所述插秧机控制系统100包括一控制手柄10、一行驶控制单元20、一插植控制单元30以及一控制器40,其中所述控制手柄10被连接于所述行驶控制单元20,通过操作所述控制手柄10能够控制所述插秧机1000的所述行驶主体220 前进、后退、加速以及减速等。所述控制手柄10被可通信地连接于所述控制器 40,所述插植控制单元30被可控制地连接于所述控制器40,通过操作所述控制手柄10能够控制所述插秧主体230的所述插植机构231的上升和下降。优选地,所述控制手柄10被保持于所述行驶主体220的方向盘旁,方便驾驶人员操作。
47.也就是说,对所述插秧机1000进行电气化改造后,驾驶人员操作频率较高的几个动作被集成于所述控制手柄10,驾驶人员通过操作所述控制手柄10就能实现对所述插秧机1000的控制。甚至只需要前期对所述插秧机1000进行简单操作后,所述插秧机1000就可以自动驾驶,进而解放驾驶人员,明显地改善了驾驶人员的工作环境和作业强度,也有利于降低插植作业的人力成本。
48.参照图3,所述控制手柄10包括一控制主体11、自所述控制主体11向下延伸的一连接杆12以及一操作键13,其中所述操作键13被可活动地设置于所述控制主体11。通过握持所述控制主体11向前或是向后移动的方式,可以控制所述插秧机本体100向前、向后、加速以及减速。每个所述操作键13对应不同的操作指令,通过选择不同的所述操作键13,所述控制手柄10发出对应的所述操作指令。所述控制器40根据所述操作指令控制所述插植控制单元30实现所述插秧主体230的所述插植机构231的上升和下降。
49.具体地,所述控制手柄10的所述控制主体11的前部和后部为弧形曲面,所述控制主体11的表面向内凹陷,且凹陷形状与人体的手部半握时的状态相适配,以符合驾驶人员的握持习惯。
50.优选地,所述操作键13包括一插植按钮131、一行走按钮132以及一拨杆 133,其中所述插植按钮131对应的操作指令为插秧,驾驶人员按下所述插植按钮131后,所述插植主
体230的所述插植机构231开始插秧作业,再按一下所述插植按钮131,即可停止插秧作业。所述行走件按钮132对应的操作为所述插秧机1000自动行走,驾驶人员按下所述行走按钮132后,所述行驶主体220的所述行驶机构221自动行走,再按一下所述行驶按钮132,即可取消自动行走。所述拨杆133对应的操作为所述插植主体230的所述插植机构231上升和下降,向下拨动所述拨杆133,则所述插植机构231下降,向上拨动所述拨杆133,则所述插植机构231上升。本领域技术人员应该理解的是,所述操作键13的具体实施方式仅仅作为示例,所述操作键13也可以被实施为包括其他控制功能。
51.在本实用新型的这个具体的实施例中,所述插植按钮131和所述拨杆133被设置于所述控制主体11的左侧部,当驾驶人员握持所述控制主体11时,所述插植按钮131和所述拨杆133靠近驾驶人员的大拇指,方便驾驶人员操作。所述行走按钮132位于所述控制主体11的下部,当需要使用所述行走按钮132时,向下移动手部即可。优选地,所述行走按钮132位于所述控制主体11的后部下方,有利于防止驾驶人员误触碰。
52.参照图4a至图5b,所述行驶控制单元20包括一手柄位置检测元件21、一 hst状态检测元件22以及一hst控制电机23。所述手柄位置检测元件21被连接于所述控制手柄10,其中所述手柄位置检测元件检测21检测所述控制手柄10 的位置变化。所述hst控制电机23根据所述控制手柄10的位置变化控制所述液压传动装置222到达对应的位置。所述hst控制电机23被连接于所述液压传动装置222,所述hst状态检测元件22被连接于所述hst控制电机23,所述hst 状态检测元件22根据所述hst控制电机23的转动角度获取所述液压传动装置 222的工作状态。以在所述hst状态检测元件22反馈所述hst控制电机23转动到对应的角度后,所述hst控制电机停止转动。所述液压传动系统222保持此时的工作状态持续输出动力,进而实现所述插秧机1000的前进、后退、加速以及减速。
53.参照图4a和图4b,具体来说,所述行驶控制单元20进一步包括一手柄驱动杆24、一第一安装板25、一支撑架26以及一第一连杆27,其中所述手柄驱动杆24的一端被连接于所述控制手柄10,另一端被安装于所述支撑架26,所述支撑架26被可转动地安装于所述插秧机本体200的所述机身主体210。所述第一安装板25被固定于所述机身主体210,所述第一连杆27和所述手柄位置检测元件21分别被保持于所述第一安装板25的两侧,且所述第一连杆27被连接于所述手柄位置检测元件21,所述第一连杆27被安装于所述支撑架26。驾驶人员在行驶所述插秧机1000的过程中,如需要所述插秧机1000前进、后退、加速以及减速时,推动所述控制手柄10,所述控制手柄10驱动所述手柄驱动杆24转动,所述手柄驱动杆24带动所述第一连杆27转动,使得所述手柄位置检测元件 21偏转一定的角度。如此,所述手柄位置检测元件21能够检测所述控制手柄10 的位置变化。
54.参照图5a和图5b,所述行驶控制单元20进一步包括一转动板28、一第二安装板29以及一第二连杆201,所述转动板28包括一卡齿部281和一体地延伸于所述卡齿部281的一调节部282。所述hst控制电机23通过所述第二安装板 29被安装于所述机身主体210。所述转动板28的所述卡齿部281被连接于所述 hst控制电机23,所述调节部282被安装于所述液压传动装置222,所述hst控制电机23转动时,带动所述转动板28相对所述液压传动装置222转动,并调节所述液压传动装置222输出的动力的大小。所述第二连杆201分别被连接于所述转动板28和所述hst状态检测元件22。所述hst状态检测元件22跟随所述转动板28偏转,进而所述hst状态检测元件22通过检测所述转动板28转动的角度获取所述hst控制电机23
转动的角度和所述液压传动装置222对应的工作状态,例如但不限于所述液压传动装置222输出的动力大小等。换句话说,所述 hst控制电机23转动的角度反应所述液压传动装置222的工作状态,通过检测所述hst控制电机23转动的角度即可获取所述液压传动装置222的工作状态。优选地,所述转动板28被实施为一齿板。
55.在本实用新型的这个具体的实施例中,所述手柄位置检测元件21和所述hst 状态检测元件22分别被实施为角度传感器,所述手柄位置检测元件21通过检测偏转角度来获取所述控制手柄10的位置变化,所述hst状态检测元件22通过检测所述hst控制电机23的转动角度来获取对应的所述液压传动装置222的工作状态。本领域技术人员应该理解的是,所述手柄位置检测元件21和所述hst状态检测元件22的具体实施方式仅仅作为示例,不能成为对本实用新型所述插秧机控制系统100的内容和范围的限制。
56.更进一步地,所述手柄位置检测元件21被可通信地连接于所述控制器40,所述手柄位置检测元件21检测到的所述控制手柄10的位置信息被传送至所述控制器40,所述hst控制电机23被可控制地连接于所述控制器40,所述控制器 40根据所述控制手柄10的位置信息控制所述hst控制电机23转动对应的角度,进而调节所述液压传动装置222的工作状态。所述hst状态检测元件22被可通信地连接于所述控制器40,所述hst检测元件22获取所述液压传动装置222的状态信号被传送至所述控制器40,当所述hst控制电机23转动至对应的角度,即所述液压传动装置222被调整至对应于所述控制手柄10的位置对应的工作状态后,所述控制器40控制所述hst转动电机23停止转动。所述液压传动系统 222保持此时的工作状态持续输出动力,进而实现所述插秧机1000的前进、后退、加速以及减速。
57.参照图6a至图7b,所述插植控制单元30包括一液压阀状态检测元件31和一液压阀控制电机32,其中所述液压阀控制电机32被可控制地连接于所述控制器40,所述插植主体230的所述液压阀232的所述液压阀杆被可驱动地连接于所述液压阀控制电机32,所述液压阀状态检测元件31能够检测所述液压阀323 的工作状态。所述控制器40根据接收的所述控制手柄10的所述操作键13发出的所述操作指令控制所述液压阀控制电机32的转动,并带动所述液压阀杆运动,进而改变所述液压阀主体的工作状态,以实现被可驱动地连接于所述液压阀主体的所述插秧主体230的所述插植机构231的上升和下降。
58.具体来说,参照图6a和图6b,所述插植控制单元30进一步包括一第一活动板33、一第二活动板34以及一第三连杆35,其中所述液压阀状态检测元件 31和所述液压阀控制电机32通过所述第二活动板34被安装于所述机身主体 210,其中所述第一活动板34被安装于所述液压阀231的所述液压阀杆,所述第三连杆35的两端分别被连接于所述第一活动板33和所述液压阀状态检测元件 31。优选地,所述第一活动板33和所述第二活动板34被实施为齿板。
59.所述第一活动板33包括一连接部331、一驱动部332以及一连接柱333,其中所述驱动部332一体地延伸于所述连接部331,所述连接柱333自所述驱动部 332向外延伸,所述第三连杆35具有一活动通孔3501,所述第一活动板33的所述连接柱333被可活动地保持于所述第三连杆35的所述活动通孔3501。
60.驾驶人员通过操作所述控制手柄10的所述操作键13发出所述操作指令,所述控制器40接收所述操作指令后控制所述液压阀控制电机32转动,所述液压阀控制电机32带动所述第一活动板33转动,所述第一活动板33带动所述液压阀 231的所述液压阀杆作动。同时,
所述第一活动板33转动时会带动所述液压阀状态检测元件31偏转一定的角度,进而所述液压阀状态检测元件31能够反馈所述液压阀杆的位置。所述液压阀杆的不同位置对应于所述液压阀主体的不同的工作状态。也就是说,通过检测所述液压阀杆的位置,即可获得所述液压阀主体对应的工作状态。
61.进一步地,所述液压阀状态检测元件31被可通信地连接于所述控制器40,所述液压阀状态检测元件31反馈所述液压阀杆的位置信息于所述控制器40,即所述控制器40能够获取所述液压阀主体的工作状态。当所述液压阀杆转动至完成所述操作指令所需的位置时,所述控制器40根据所述液压阀状态检测元件31 反馈的信息控制所述液压阀控制电机32停止转动。通过这样的方式,利用所述控制手柄10就能够控制所述插秧机本体200的所述插植主体230的所述插植机构231上升和下降等作业。
62.在本实用新型所述插秧机控制系统100的这个具体的实施例中,所述插植控制单元30能够反馈所述插植主体230的所述插植机构231的实时位置,不仅能够控制所述插植机构231保持于一预设高度,而且方便驾驶人员了解所述插植机构231的实际高度,以更好地控制所述插植机构231的具体作业。
63.具体来说,参照图7a和图7b,所述插植控制单元30进一步包括一插植位置检测元件36、一第三安装板37、一第四连杆38以及一第五连杆39。所述插植位置检测元件36通过所述第三安装板37被安装于所述机身主体210。所述第五连杆39的两端分别被连接于所述插植主体230的所述插植机构231和所述第四连杆38。所述第四连杆38的两端分别被连接于所述第五连杆39和所述插植位置检测元件36。所述插植机构231在作动的过程中拉动所述第五连杆39和所述第四连杆38,从而带动所述插植位置检测元件36转动,进而所述插植位置检测元件36能够反馈所述插植机构231的位置变化信息。
64.进一步地,所述插植位置检测元件36被可通信地连接于所述控制器40,所述控制器40可以根据所述插植位置检测元件36反馈的位置信息控制所述液压阀控制电机32的工作状态,进而使得所述插植机构231能够被保持于所述预设高度。比如说,当所述插植位置检测元件36检测到所述插植机构231上升至预设高度时,所述控制器40控制所述液压阀控制电机32的转动,进而控制所述液压阀231达到中立位置,以保持所述插植机构231于预设高度。
65.在本实用新型的这个具体的实施例中,所述液压阀状态检测元件31和所述插植位置检测元件36分别被实施为角度传感器。所述液压阀状态检测元件31通过检测所述液压阀控制电机32的转动角度获取所述液压阀主体的工作状态。所述插植位置检测元件36通过检测被连接于所述插植机构231的连杆的转动角度的方式获取所述插植机构231上升和下降的位置。本领域技术人员应该理解的是,所述液压阀状态检测元件31和所述插植位置检测元件36的具体实施方式仅仅作为示例,不能成为对本实用新型所述插秧机控制系统100的内容和范围的限制。
66.参照图8a和图8b,在本实用新型所述插秧机控制系统100的这个具体的实施例中,所述插秧机控制系统100进一步包括一转向控制单元50,所述转向控制单元50能够实时地检测所述插秧机本体200的所述行驶主体220的轮胎的方向变化。
67.具体来说,所述转向控制单元50包括一转向角度检测元件51、一安装座52、一连接件53、一驱动杆54以及一转向板55,其中所述安装座52被安装于所述插秧机本体200的所述
机身本体210,所述转向角度检测元件51被安装于所述安装座52,所述驱动杆54被连接于所述转向板55和所述连接件53,所述连接件53连接所述转向角度检测元件51,所述转向板55被连接于所述行驶机构221 的方向盘。
68.当所述插秧机1000需要转向时,所述行驶机构221的所述方向盘转动,所述方向盘带动所述转向板55转动,所述转向板55带动所述连接件53转动,所述连接件53带动所述转向角度检测元件51偏转一定的角度,进而所述转向角度检测元件51能够获得所述行驶机构221的轮胎转动的角度。
69.进一步地,所述转向角度检测元件51被可通信地连接于所述控制器40,所述转向角度检测元件51反馈所述行驶机构221的轮胎的角度变化信息于所述控制器40,进而驾驶人员能够了解所述轮胎及时的方向,以便于更好地控制所述插秧机1000的行驶。
70.依据本实用新型的另一个方面,本实用新型进一步提供所述插秧机控制系统 100的控制方法,其中所述控制方法包括如下步骤:
71.(a)获取所述控制手柄的位置信息;和
72.(b)根据所述控制手柄的位置信息控制所述hts控制电机的转动;以及
73.(c)所述hst控制电机调节所述液压传动装置的工作状态。
74.具体来说,在所述步骤(a)中,利用角度传感器检测所述控制手柄的位置变化。在所述步骤(b)中,所述角度传感器将所述控制手柄的位置信息发送至所述控制器40,所述控制器40控制所述hst控制电机的转动。
75.进一步地,在所述步骤(c)之后包括步骤(d)获取所述hst控制电机的转动角度。优选地,在所述步骤(d)中,利用角度传感器检测所述hst控制电机的转动角度。
76.在所述步骤(d)之后,进一步包括步骤(e)在所述hst控制电机转动至与所述手柄的位置相对应的角度后,所述hst控制电机被控制地停止转动,所述液压传动装置保持此时的工作状态持续输出动力。具体地,在所述步骤(e)中,所述角度传感器反馈所述hst控制电机的转动角度于所述控制器40,所述控制器40控制所述hst控制电机停止转动。
77.在所述控制方法中,进一步包括步骤(f)所述控制器40在执行所述控制手柄10的所述操作指令时控制所述液压阀控制电机32转动,并调节所述液压阀 232至对应的工作状态。
78.在所述控制方法中,进一步包括步骤(g)利用角度传感器检测所述插植机构231的位置变化。进一步地,所述控制器40根据所述插植机构231的位置信息控制所述液压阀控制电机32的工作状态,进而使得所述插植机构231能够被保持于所述预设高度。
79.本领域的技术人员可以理解的是,以上实施例仅为举例,其中不同实施例的特征可以相互组合,以得到根据本实用新型揭露的内容很容易想到但是在附图中没有明确指出的实施方式。
80.本领域的技术人员应理解,上述描述及附图中所示的本实用新型的实施例只作为举例而并不限制本实用新型。本实用新型的目的已经完整并有效地实现。本实用新型的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本实用新型的实施方式可以有任何变形或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。