本发明涉及一种真空泵,尤其涉及一种包括磁轴承及马达的真空泵。
背景技术
之前,已知有包括磁轴承及马达的真空泵。此种真空泵例如公开于日本专利特开2000-283160号公报。
所述日本专利特开2000-283160号公报中,公开有一种包括转子翼、使转子翼旋转的高频马达及五轴控制型磁轴承的涡轮分子泵(真空泵)。五轴控制型磁轴承中,使用两组半径方向位置控制用电磁石及一组轴向位置控制用电磁石。
日本专利特开2000-283160号公报中虽未明示记载,但在日本专利特开2000-283160号公报的图式中公开有下述结构,即:在上下延伸的旋转轴的前端设有转子翼,沿着旋转轴的轴向,自转子翼侧起依序排列设有第一组半径方向位置控制用电磁石、高频马达、第二组半径方向位置控制用电磁石、轴向位置控制用电磁石。
[现有技术文献]
[专利文献]
专利文献1:日本专利特开2000-283160号公报
技术实现要素:
[发明所要解决的问题]
如所述日本专利特开2000-283160号公报那样,现有的真空泵中,除了用于使包含转子翼及旋转轴的旋转体旋转的马达以外,为了使旋转体磁悬浮,而设置两组半径方向位置控制用电磁石(径向磁轴承)及一组轴向位置控制用电磁石(推力磁轴承),将这些四个机构(马达、两组径向磁轴承、一组推力磁轴承)沿轴向排列配置。
此处,为了在更小的空间也可设置真空泵,期望抑制轴向的真空泵的尺寸。对于现有的真空泵而言,未对轴向的真空泵的尺寸进行充分研究。
本发明是为了解决所述那样的课题而成,本发明的一个目的在于提供一种可抑制轴向的尺寸的真空泵。
[解决问题的技术手段]
为了实现所述目的,本发明的一个方面的真空泵包括:旋转体,包含旋转轴、翼支撑部及旋转翼,所述旋转轴具有第一端及第二端,且在轴向延伸,所述翼支撑部连接于旋转轴的第一端侧,且在旋转轴的轴向以内径自第一端侧向第二端侧扩大的方式延伸,所述旋转翼设于翼支撑部的外周面;以及旋转机构,包含将旋转体旋转驱动的马达、在径向支撑旋转体的第一径向磁轴承及第二径向磁轴承、及在轴向支撑旋转体的推力轴承,旋转机构包含:磁轴承单元,在旋转轴与翼支撑部之间设于旋转轴的周围,具有第一外径,可作为第一径向磁轴承而运行;以及马达单元,以较磁轴承单元更靠旋转轴的第二端侧的位置设于旋转轴的周围,具有大于第一外径的第二外径,可作为马达与第二径向磁轴承的两者而运行。
再者,本说明书中,“单元”为用以实现某功能的机械结构的总称。所谓可作为马达与第二径向磁轴承的两者而运行的马达单元,为以马达的结构元件与第二径向磁轴承的结构元件至少共用一部分的方式设置的单元。另外,所谓“在旋转轴的轴向,内径自第一端侧向第二端侧扩大”,为不仅包含内径连续地扩大的形状,而且包含内径阶段性地扩大的形状的广泛概念。“磁轴承”为在恒常运行时通过磁力以非接触方式支撑旋转轴的轴承。非接触的支撑容许磁轴承的停止时、与伴随运行开始及运行停止的非恒常状态的接触。
[发明的效果]
根据本发明,如上文所述,通过设置可作为马达与第二径向磁轴承的两者而运行的马达单元,从而马达与第二径向磁轴承统合为单一的单元,故而与将马达与第二径向磁轴承分别在轴向排列的情形相比,可抑制单元所占有的区域的轴向尺寸。另外,对于马达与第二径向磁轴承统合为单一的单元的马达单元而言,例如与仅马达的单元相比,有轴向尺寸或半径方向尺寸大型化的倾向。因此,马达单元具有较磁轴承单元的第一外径更大的第二外径,故而可与使半径方向尺寸大型化相应地,针对马达单元的轴向尺寸抑制大型化。进而,若着眼于旋转体,则于在旋转轴的第一端侧设有旋转翼的结构中,越在轴向远离旋转翼,在旋转轴的周围可确保的所述马达及轴承的设置空间越可在半径方向增大。因此,通过将外径小的磁轴承单元配置于第一端侧(旋转翼侧),将外径大的马达单元配置于第二端侧,从而可对照形成于旋转体的设置空间的形状,使磁轴承单元及马达单元的轴向位置尽量靠近旋转翼。以上的结果为,根据本发明,可提供一种可抑制轴向的尺寸的真空泵。
附图说明
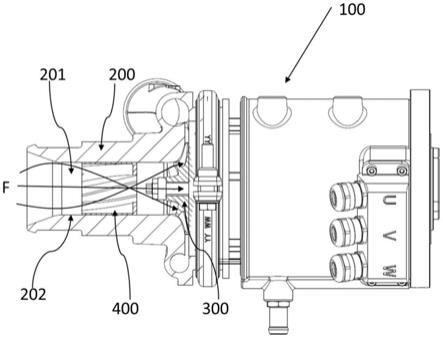
图1为表示真空泵的整体结构的示意性剖面图。
图2为表示旋转体、磁轴承单元及马达单元的配置的示意图。
图3为用以说明真空泵的控制结构的框图。
图4为自轴向观看马达单元的示意性剖面图。
图5为用以说明马达单元的运行的示意图。
图6为自轴向观看磁轴承单元的第一径向磁轴承的示意性剖面图。
图7为自半径方向观看磁轴承单元的示意性剖面图。
图8为表示真空泵的变形例的示意性剖面图。
图9为自轴向观看变形例的磁轴承单元的示意性剖面图。
图10为自半径方向观看变形例的磁轴承单元的示意性剖面图。
具体实施方式
以下,基于图式对将本发明具体化的实施形态进行说明。
参照图1~图7,对一实施形态的真空泵100进行说明。
(真空泵的结构)
如图1所示,真空泵100为用以自容器内排出气体而将容器内设为真空(减压)的泵。再者,所谓真空,是设为较真空泵100的周围的大气压更低的压力状态。
真空泵100包括至少一个吸气口1、至少一个排气口2及至少一个泵部3。真空泵100通过泵部3的运行而自吸气口1向泵部3的内部吸入气体,并将吸入的气体自排气口2排出。真空泵100包括收容泵部3的外壳4。图1的例子中,在外壳4形成有一个吸气口1,收容有一个泵部3。在外壳4,连接有形成有排气口2的排气管2a。排气口2经由排气管2a、泵部3而与吸气口1连通。
另外,图1的例子中,在真空泵100设有用以控制泵部3的运行的控制单元5。控制单元5安装于外壳4的底部。控制单元5也可为与真空泵100分别设置,通过有线或无线而与真空泵100可通讯地连接的结构。
(泵部)
泵部3包含旋转体10及旋转机构20。旋转体10及旋转机构20收容于外壳4内。通过旋转体10由旋转机构20旋转驱动,从而在旋转体10与外壳4之间产生气体的吸引力。
图1的结构例中,泵部3包含第一泵结构3a及第二泵结构3b。图1的例子中,真空泵100为第一泵结构3a与第二泵结构3b串列连接的复合型的真空泵。自吸气口1导入至泵部3的气体依序穿过第一泵结构3a、第二泵结构3b,自排气口2排出。
旋转体10包含旋转轴11、翼支撑部12及旋转翼13。旋转体10是以旋转轴11、翼支撑部12及旋转翼13一体旋转的方式设置。第一泵结构3a通过旋转体10的旋转翼13及外壳4的固定翼71构成涡轮分子泵(turbomolecular pump)。旋转体10包含圆筒部14,所述圆筒部14自翼支撑部12向旋转轴11的第二端11b侧延伸,与外壳4之间构成第二泵结构3b。在旋转体10,以一体地旋转的方式设有构成第一泵结构3a的旋转翼13、与构成第二泵结构3b的圆筒部14。第二泵结构3b通过旋转体10的后述的圆筒部14、及外壳4的泵定子73构成分子牵引泵(molecular drag pump)。
以下,将旋转轴11的中心轴线延伸的方向称为轴向或推力方向。将旋转轴11的半径方向简称为半径方向或径向方向。各图中,将轴向设为Z方向,将Z方向中的Z1方向称为第一端11a侧,将Z2方向称为第二端11b侧。
如图1所示,旋转机构20包含将旋转体10旋转驱动的马达30、在径向支撑旋转体10的第一径向磁轴承40及第二径向磁轴承50、以及在轴向支撑旋转体10的推力轴承。本实施形态中,推力轴承为设于旋转轴的周围的推力磁轴承60。旋转机构20是以将旋转轴11作为中心而包围旋转轴11的周围的方式设置。
马达30包含设于旋转轴11的马达转子30b(参照图4)、及设于旋转机构20的马达定子30a(参照图4)。
旋转机构20包括包含两组径向磁轴承及一组推力磁轴承的五轴磁轴承。
即,旋转机构20包含分别设于旋转轴11的周围的第一径向磁轴承40与第二径向磁轴承50。旋转机构20包含设于旋转轴11的周围的推力磁轴承60。磁轴承通过使旋转体10磁悬浮,从而以与旋转体10非接触的状态可旋转地支撑旋转体10。
通过一组径向磁轴承,可进行彼此正交的两个径向方向(设为X方向、Y方向)的位置控制(双轴)。通过在轴向排列配置的两组径向磁轴承,可进行绕X方向及绕Y方向的倾斜的姿势控制。通过推力磁轴承,可进行推力方向(Z方向)的位置控制(单轴)。磁轴承通过第一个径向磁轴承的X1轴及Y1轴、第二个径向磁轴承的X2轴及Y2轴、以及推力磁轴承的Z轴,可进行五轴控制。
本实施形态中,旋转机构20至少包含磁轴承单元21及马达单元22。磁轴承单元21是以可作为第一径向磁轴承40而运行的方式构成。本实施形态中,图1的结构例中,磁轴承单元21进而可作为推力磁轴承60而运行。即,磁轴承单元21为一体地包含第一径向磁轴承40与推力磁轴承60的单一的单元。马达单元22是以可作为马达30与第二径向磁轴承50的两者而运行的方式构成的单元。如此作为马达30与第二径向磁轴承50的两者而运行的结构不需要通常与马达分别设置的一组径向磁轴承,故而被称为无轴承马达、或自轴承马达等。磁轴承单元21及马达单元22的详细结构将于后述。
外壳4包含基部4a及箱部4b。在基部4a设有旋转机构20,插入有旋转体10的旋转轴11。在基部4a连接有排气管2a。箱部4b安装于基部4a的上表面。箱部4b以包围设置于基部4a的旋转体10的周围的方式形成为圆筒状,在上表面形成有吸气口1。
另外,真空泵100具有多个机械轴承6、多个位移传感器7及旋转传感器8。多个机械轴承6在基部4a设于旋转轴11的第一端11a的附近、及第二端11b的附近。机械轴承6可与旋转轴11接触而在径向方向及推力方向支撑旋转轴11。机械轴承6为在磁轴承未工作时(未磁悬浮时)或产生扰乱时,代替磁轴承支撑旋转体10的保护轴承(touch-down bearing)。在磁轴承的工作时,机械轴承6与旋转轴11(旋转体10)成为非接触。
如图3所示,位移传感器7包含分别检测旋转轴11的径向方向(X1方向、Y1方向、X2方向、Y2方向)的位移的位移传感器7a~位移传感器7d、及检测旋转轴11的推力方向(Z方向)的位移的位移传感器7e。旋转传感器8检测旋转轴11的旋转角度。
控制单元5包含控制部81、电源部82、单元驱动部83及传感器电路部84。
电源部82自外部电源获取电力,向控制部81、单元驱动部83及传感器电路部84进行电力供给。电源部82进行将来自外部的交流电力变换为直流电力的电力变换。
单元驱动部83基于来自控制部81的控制信号,控制向旋转机构20的驱动电流的供给。通过单元驱动部83的电流控制,旋转机构20的马达30产生旋转方向的驱动力(扭矩),磁轴承分别产生各方向的支撑力。单元驱动部83包含用以控制向磁轴承单元21的电流供给的反相器85a及反相器85b。单元驱动部83包含用以控制向马达单元22的电流供给的反相器85c及反相器85d。反相器85a~反相器85d分别包含多个切换元件。
传感器电路部84包含位移传感器7a~位移传感器7e及旋转传感器8,且包含进行用于将各传感器信号输入至控制部81的变换处理的电路等。自传感器电路部84将位移传感器7a~位移传感器7e及旋转传感器8的各传感器信号输入至控制部81。
控制部81包含计算机,所述计算机包含中央处理器(Central Processing Unit,CPU)或现场可编程门阵列(Field Programmable Gate Array,FPGA)等处理器、与挥发性和/或非挥发性存储器。
控制部81经由单元驱动部83进行旋转机构20的运行控制。控制部81获取来自传感器电路部84的各方向的传感器信号,基于所获取的传感器信号,输出用以对设于反相器85a、反相器85b及反相器85d的多个切换元件进行开关控制的控制信号。由此,控制部81以在真空泵100的运行中,旋转体10不与真空泵100的任何固定元件接触的方式,控制各磁轴承。
控制部81基于旋转传感器8的传感器信号,输出用以对设于反相器85c的多个切换元件进行开关控制的控制信号。由此,控制部81基于旋转体10的旋转位置进行马达30的控制。
(旋转体的结构)
如图2所示,旋转轴11为具有第一端11a及第二端11b,在轴向延伸的圆柱状构件。图1的例子中,第一端11a为旋转轴11的上端,第二端11b为旋转轴11的下端。旋转轴11由旋转机构20绕中心轴线可旋转地枢轴支撑。另外,旋转轴11由旋转机构20绕中心轴线旋转驱动。图1的例子中,表示以旋转轴11沿上下方向(铅垂方向)延伸的方式设置的立式的真空泵100的例子,但旋转轴11的方向并无特别限定。旋转轴11也可朝向水平方向或倾斜方向而配置。
翼支撑部12为旋转体10中将旋转翼13与旋转轴11机械连接的部分。翼支撑部12连接于旋转轴11的第一端11a侧。翼支撑部12以在旋转轴11的轴向,内径自第一端11a侧向第二端11b侧扩大的方式延伸。即,翼支撑部12概略形成为朝向旋转轴11的第一端11a的圆锥状。翼支撑部12具有自旋转轴11的第二端11b侧向第一端11a侧倾斜的锥形状部12a。翼支撑部12具有自旋转轴11的第一端11a在半径方向延伸的凸缘部12b。锥形状部12a机械连接于凸缘部12b的外周端部。
旋转体10具有多个旋转翼13。旋转翼13设于翼支撑部12的外周面。旋转翼13自翼支撑部12的外周面在半径方向延伸至外壳4的内周面附近为止。
如上文所述,旋转翼13与外壳4之间构成第一泵结构3a。多个旋转翼13在轴向空开间隔而设有多段。多个旋转翼13以沿着锥形状部12a的外周面及凸缘部12b的外周面排列的方式设置。
另外,如图1所示,在外壳4的内周面设有多个固定翼71。各固定翼71自外壳4的内周面向半径方向内侧(旋转轴11侧)延伸。多个固定翼71以与多个旋转翼13以一段为单位在轴向交替排列的方式设置。各固定翼71经由在轴向层叠的隔环72而载置于基部4a上。通过将层叠的隔环72夹持于基部4a与箱部4b之间,从而对各固定翼71进行定位。由此,泵部3含有包含旋转体10的旋转翼13(动翼)及外壳4的固定翼71(静翼)的第一泵结构3a。
圆筒部14具有与旋转轴11同轴的圆筒形状。圆筒部14具有连接于翼支撑部12的第一圆筒端部14a、及旋转轴11的轴向的与翼支撑部12为相反侧的第二圆筒端部14b。圆筒部14自连接于锥形状部12a的第一圆筒端部14a沿轴向直线状地延伸至第二圆筒端部14b为止。
另外,在外壳4的内周面设有圆筒状的泵定子73。泵定子73的内周面与圆筒部14的外周面空开小的间隔而在半径方向相向。在泵定子73的内周面形成有螺槽(未图示)。由此,泵部3含有包含旋转体10的圆筒部14及外壳4的泵定子73的第二泵结构3b。再者,螺槽(未图示)只要形成于圆筒部14的外周面或泵定子73的内周面的任一个即可。
(旋转机构的结构)
图1的例子中,旋转机构20包含磁轴承单元21及马达单元22两个单元。
磁轴承单元21在旋转轴11与翼支撑部12之间设于旋转轴11的周围。马达单元22在较磁轴承单元21更靠旋转轴11的第二端11b侧的位置设于旋转轴11的周围。
<马达单元>
如图4所示,马达单元22(马达定子30a)在与旋转轴11的轴向正交的面内,具有构成马达30的马达线圈31、构成第二径向磁轴承50的第二线圈51、以及分别卷绕有马达线圈31及第二线圈51的定子芯32。
换言之,图4所例示的马达单元22中,针对包含马达线圈31及定子芯32的马达定子30a,进一步组装有第二径向磁轴承50的第二线圈51。
定子芯32包含多个齿32a及定子轭32b。定子轭32b以包围旋转轴11的周围的方式形成为圆环状。多个齿32a自定子轭32b的内周面向旋转轴11的中心在半径方向延伸。多个齿32a在周向以等角度间隔配置,在相邻的齿32a之间形成有收容线圈的狭槽32c。
马达线圈31及第二线圈51卷绕于各齿32a。图4中,马达线圈31及第二线圈51在与旋转轴11的轴向正交的面内,在半径方向排列配置。即,在同一狭槽32c内配置有马达线圈31及第二线圈51的两者。图4的例子中,马达线圈31配置于半径方向内侧,第二线圈51配置于半径方向外侧。
马达线圈31及第二线圈51彼此为不同的线圈,经电性绝缘。马达线圈31电性连接于反相器85c(参照图3),第二线圈51电性连接于反相器85d(参照图3)。反相器85c例如向马达30供给三相电流(U相、V相、W相)。马达30包含分别供给U相、V相、W相三相电流的三组马达线圈31(Mu、Mv、Mw)。反相器85d例如向第二径向磁轴承50供给三相电流(U相、V相、W相)。第二径向磁轴承50包含分别供给U相、V相、W相三相电流的三组第二线圈51(Su、Sv、Sw)。
另外,马达转子30b以与旋转轴11一体地旋转的方式设于旋转轴11。即,在旋转轴11,在与定子芯32空开间隙在半径方向相向的位置(轴向的同一位置),设有永磁石33。图4的例子中,遍及旋转轴11的周向的一半设有经磁化为N极的永磁石33,遍及旋转轴11的周向的另一半设有经磁化为S极的永磁石33。
图4中,表示了两极、六狭槽结构的例子,但极数、狭槽数并无特别限定。另外,图4中,马达线圈31及第二线圈51的各卷线方式不限于集中卷绕,也可为分布卷绕等其他卷线方式。
如图5所示,控制部81(参照图3)经由反相器85c(参照图3)对各马达线圈31供给电流,使马达线圈31的磁通31a与永磁石33的磁通33a相互作用。即,马达30通过马达线圈31的磁通31a而对永磁石33的磁极赋予吸引、排斥的作用力。控制部81根据旋转体10的旋转角度位置而切换供给电流的马达线圈31,由此生成旋转的磁通31a,使旋转体10以所期望的旋转速度旋转。由马达30所得的旋转体10的旋转速度例如为1万rpm以上且10万rpm以下。
另外,控制部81(参照图3)经由反相器85d(参照图3)对第二线圈51供给电流,通过第二线圈51的磁通51a与永磁石33的磁通33a的相互作用,在旋转轴11(马达转子30b)与定子芯32(马达定子30a)之间的间隙形成合成磁通的疏密。其结果为,第二径向磁轴承50对旋转轴11赋予支撑力55,所述支撑力55朝向第二线圈51的磁通51a与永磁石33的磁通33a彼此相长的方向。
例如图5中,通过两个第二线圈51(Su)的磁通51a与磁通33a,在马达转子30b的N极侧的间隙磁通相长,在S极侧的间隙磁通相消,故而朝向磁通量多的N极侧(图中右侧)的支撑力55发挥作用。图5中对U相的第二线圈51(Su)进行了例示,但通过控制对各第二线圈51供给的电流的强度、方向,从而可在任意的径向方向产生任意强度的支撑力55。控制部81基于位移传感器7c、位移传感器7d及旋转传感器8(参照图3)的传感器信号,控制向各第二线圈51的电流供给,从而以旋转体10在半径方向维持非接触状态的方式控制第二径向磁轴承50的支撑力55。
<磁轴承单元>
如图6所示,磁轴承单元21包含构成第一径向磁轴承40的第一线圈41。另外,如图7所示,本实施形态中,磁轴承单元21包含构成推力磁轴承60的推力线圈61。另外,磁轴承单元21具有磁石部42,所述磁石部42产生与第一径向磁轴承40及推力磁轴承60的两者相互作用的磁通。
如图6所示,第一径向磁轴承40包含安装有第一线圈41的第一轴承芯43。第一轴承芯43以包围旋转轴11的周围的方式形成为圆环状。在第一轴承芯43,于在周向空开间隔配置的多个齿43a之间,设有多个狭槽43b。图6中,在四个狭槽43b各自安装有合计四个第一线圈41。第一线圈41通过电流供给而在半径方向产生磁通41a。
在旋转轴11,在轴部11c的外周部设有第一芯部44。第一芯部44具有圆环形状,与第一轴承芯43在半径方向相向。
如图7所示,推力磁轴承60与第一径向磁轴承40在轴向邻接而一体化。推力磁轴承60包含安装有推力线圈61的推力芯62。推力芯62以包围旋转轴11的周围的方式形成为圆环状。推力芯62在沿着轴向的纵剖面(图7所示的剖面)中,具有半径方向内侧开口的C字形状的剖面。即,推力芯62在半径方向内侧,具有第一端面62a及第二端面62b。推力线圈61配置于C字形状的推力芯62的内部,绕轴向的卷绕轴以包围旋转轴11的周围的方式卷绕成圆环状。
磁石部42在轴向配置于第一径向磁轴承40与推力磁轴承60之间。即,磁石部42配置于第一轴承芯43与推力芯62之间。磁石部42以连结第一轴承芯43与推力芯62的方式设置。磁石部42以包围旋转轴11的周围的方式形成为圆环状。磁石部42为永磁石,朝向轴向经磁化。图7的例子中,磁石部42中,与第一轴承芯43在轴向相向的表面经磁化为S极,与推力芯62在轴向相向的面经磁化为N极。
在旋转轴11,在轴部11c的外周部设有第二芯部63。第二芯部63具有圆环形状,与推力芯62在半径方向相向。
磁轴承单元21中,磁石部42产生穿过第一轴承芯43及推力芯62的磁通。即,磁石部42形成下述路径的偏置磁通42a:自磁石部42的N极依序穿过推力芯62、旋转轴11与芯的间隙、第二芯部63、轴部11c(旋转轴11)、第一芯部44、旋转轴11与芯的间隙、第一轴承芯43,回到磁石部42的S极。
因此,图6所示的第一径向磁轴承40中,在第一轴承芯43的各齿43a,偏置磁通42a朝向半径方向外侧穿过。控制部81(参照图3)经由反相器85a(参照图3)对第一线圈41供给电流,通过第一线圈41的磁通41a与磁石部42的偏置磁通42a的相互作用,在旋转轴11与第一轴承芯43之间的间隙形成合成磁通的疏密。其结果为,第一径向磁轴承40对旋转轴11赋予支撑力47,所述支撑力47朝向第一线圈41的磁通41a与磁石部42的偏置磁通42a彼此相长的方向。
例如图6中,通过两个第一线圈41的各磁通41a,在间隙45磁通相长,在与间隙45为相反侧的间隙46磁通相消,故而朝向磁通量多的间隙45侧(图中右上方向)的支撑力47发挥作用。通过控制对各第一线圈41供给的电流的强度、方向,从而可在任意的径向方向产生任意强度的支撑力47。控制部81基于位移传感器7a、位移传感器7b及旋转传感器8(参照图3)的传感器信号,切换向各第一线圈41的电流供给,由此以旋转体10在半径方向维持非接触状态的方式控制第一径向磁轴承40的支撑力47。
另一方面,如图7所示,偏置磁通42a自推力芯62的第一端面62a及第二端面62b各自穿过间隙进入第二芯部63,在旋转轴11内在轴向穿过。控制部81(参照图3)经由反相器85b(参照图3)对推力线圈61供给电流,通过推力线圈61的磁通61a与磁石部42的偏置磁通42a的相互作用,在旋转轴11与推力芯62之间的间隙形成合成磁通的疏密。其结果为,推力磁轴承60对旋转轴11赋予支撑力64,所述支撑力64朝向推力线圈61的磁通61a与磁石部42的偏置磁通42a彼此相长的方向。
例如图7中,在第一端面62a侧的间隙磁通相长,在第二端面62b侧的间隙磁通相消,故而朝向磁通量多的第一端面62a侧(图中上方向)的轴向的支撑力64发挥作用。若对推力线圈61供给逆向的电流,则在轴向的相反侧产生支撑力64。通过控制对各推力线圈61供给的电流的强度、方向,从而可在推力方向产生任意强度的支撑力64。控制部81基于位移传感器7e的传感器信号而切换向推力线圈61的电流供给,由此以旋转体10在轴向维持非接触状态的方式控制推力磁轴承60的支撑力64。立式的真空泵100中,通过支撑力64而支撑旋转体10的重量67。
如此,本实施形态中,推力磁轴承60包含分别产生在轴向穿过旋转轴11的磁通的磁石部42及推力线圈61,以通过磁石部42的磁通42a与推力线圈61的磁通61a的相互作用而对旋转轴11产生推力方向的支撑力64的方式构成。
(磁轴承单元及马达单元的配置)
继而,参照图1及图2对磁轴承单元21及马达单元22的配置进行说明。
如图2所示,磁轴承单元21配置于旋转轴11的轴向的第一轴向位置25。磁轴承单元21具有第一外径91。马达单元22配置于轴向的第二轴向位置26。如上文所述,第二轴向位置26为较第一轴向位置25更靠旋转轴11的第二端11b侧的位置。马达单元22具有大于第一外径91的第二外径92。
旋转体10在旋转轴11与翼支撑部12之间,具有用以配置旋转机构20的收容空间15。旋转体10的收容空间15为由翼支撑部12及圆筒部14的内周面所划分的旋转体10的凹状空间。磁轴承单元21在第一轴向位置25中配置于收容空间15的第一部分。马达单元22在第二轴向位置26中配置于收容空间15的第二部分。收容空间15的第二部分相较于收容空间15的第一部分而在半径方向更广。
具体而言,收容空间15反映翼支撑部12及圆筒部14的形状,具有直径自第二端11b侧向第一端11a在轴向以圆筒状延伸后,朝向第一端11a以锥状减小的形状。收容空间15在旋转体10的第二端11b侧的圆筒部14的形成区域中具有内径93,在锥形状部12a的形成区域中内径从内径93以锥状减小至内径94为止。
图2的例子中,磁轴承单元21的第一外径91小于内径93及内径94。另一方面,马达单元22的第二外径92小于内径93,且为内径94以上。因此,与两个单元中将马达单元22配置于第一端11a侧的情形相比,通过将磁轴承单元21配置于第一端11a侧,从而可与第一外径91小相应地,将各单元靠近第一端11a侧而配置。
更具体而言,图2的结构例中,磁轴承单元21在与旋转轴11的轴向正交的面内,配置于旋转轴11与锥形状部12a之间。磁轴承单元21在旋转轴11的轴向,配置于较锥形状部12a的第二端11b侧(Z2方向侧)的端部(与圆筒部14的第一圆筒端部14a的边界)更靠第一端11a侧(Z1方向侧)的位置。锥形状部12a在轴向以长度95的范围设置,磁轴承单元21收容于设有锥形状部12a的长度95的范围内。
另外,图2的结构例中,马达单元22的至少一部分配置于由翼支撑部12的内周面及圆筒部14的内周面所划分的收容空间15内。在轴向,马达单元22配置于较圆筒部14的第二圆筒端部14b更靠第一圆筒端部14a侧。即,马达单元22配置于较圆筒部14的第二圆筒端部14b更向第一端11a侧远离距离96的位置。另外,图2的结构例中,马达单元22的至少一部分配置于较锥形状部12a的第二端11b侧(Z2方向侧)的端部更靠第一端11a侧的位置。即,马达单元22的一部分在与旋转轴11的轴向正交的面内,配置于旋转轴11与锥形状部12a之间。
因此,图2所示的结构例中,构成旋转机构20的磁轴承单元21及马达单元22的两者并未自形成于旋转体10的收容空间15的端部(圆筒部14的第二圆筒端部14b)向Z2方向侧伸出,而是收容于收容空间15的内部。
另外,旋转体10在旋转轴11上具有重心16。若着眼于旋转体10的重心16与旋转机构20的各单元的位置关系,则在旋转轴11的轴向,磁轴承单元21的第一线圈41的中心25a相较于马达单元22的第二线圈51的中心26a,更接近旋转体10的重心16。即,在轴向,重心16位于较第一线圈41的中心25a与第二线圈51的中心26a的中点更靠第一端11a侧(Z1方向侧)。
图2的结构例中,磁轴承单元21的轴向的形成范围97、与旋转体10的重心16的轴向的位置彼此重叠(overlap)。即,磁轴承单元21是遍及轴向的两端间的长度97的范围而形成。旋转体10的重心16在轴向配置于磁轴承单元21的形成范围97内。再者,马达单元22在第二轴向位置26,遍及轴向的两端间的长度98的范围(形成范围98)而形成。
(本实施形态的效果)
本实施形态中,可获得如下效果。
本实施形态中,如上文所述,通过设置可作为马达30与第二径向磁轴承50的两者而运行的马达单元22,从而马达30与第二径向磁轴承50统合为单一的单元,故而与将马达30与第二径向磁轴承50分别在轴向排列的情形相比,可抑制单元所占有的区域的轴向尺寸。另外,对于马达30与第二径向磁轴承50统合为单一的单元的马达单元22而言,例如与未设置第二径向磁轴承50的仅马达30的单元相比,有轴向尺寸或半径方向尺寸大型化的倾向。本实施形态中,马达单元22具有较磁轴承单元21的第一外径91更大的第二外径92,故而可与使半径方向尺寸大型化相应地,针对马达单元22的轴向尺寸(长度98)而抑制大型化。进而,若着眼于旋转体10,则于在旋转轴11的第一端11a侧设有旋转翼13的结构中,越在轴向(Z2方向)远离旋转翼13,在旋转轴11的周围可确保的所述马达30及磁轴承的设置空间(收容空间15)越可在半径方向增大。因此,通过将外径小的磁轴承单元21配置于第一端11a侧(旋转翼13侧),将外径大的马达单元22设为第二端11b侧,从而可对照形成于旋转体10的设置空间(收容空间15)的形状,使磁轴承单元21及马达单元22的轴向位置(25、26)尽量靠近旋转翼13。以上的结果为,根据本实施形态,可提供一种可抑制轴向的尺寸的真空泵100。
另外,所述实施形态中,通过如以下那样构成,从而获得进一步的效果。
即,所述实施形态中,马达单元22在与旋转轴11的轴向正交的面内,具有构成马达30的马达线圈31、构成第二径向磁轴承50的第二线圈51、以及分别卷绕有马达线圈31及第二线圈51的定子芯32。若如此构成,则马达线圈31与第二线圈51分别设于共同的定子芯32,故而与马达线圈31与第二线圈51设于不同的芯的情形相比,可使马达单元22小型化,进而可削减零件数。马达线圈31与第二线圈51配置于与旋转轴11的轴向正交的同一面内,故而马达单元22的轴向尺寸不会大型化,可将马达30与第二径向磁轴承50统合为单一单元。
另外,本实施形态中,如上文所述,推力轴承为设于旋转轴11的周围的推力磁轴承60。推力磁轴承60包含分别产生在轴向穿过旋转轴11的磁通的磁石部42及推力线圈61,以通过磁石部42的磁通与推力线圈61的磁通的相互作用而对旋转轴11产生推力方向的支撑力64的方式构成。此处,关于推力方向的磁轴承,已知有下述结构,即:将自外周面向半径方向突出的圆盘部设于旋转轴11,自以在轴向夹持所述圆盘部的方式配置的线圈对使磁力在轴向发挥作用,由此产生推力方向的支撑力。所述结构中,圆盘部与线圈对在轴向排列,故而轴向尺寸大型化。相对于此,若如所述实施形态那样构成,则自磁石部42及推力线圈61分别产生穿过旋转轴11的磁通(42a、61a),通过这些磁通的相互作用而产生轴向的支撑力64,故而无需设置圆盘部,也无需以夹持圆盘部的方式设置线圈对。因此,可抑制推力磁轴承60的轴向尺寸,故而可相应地抑制真空泵100的轴向尺寸。
另外,本实施形态中,如上文所述,磁轴承单元21可作为推力磁轴承而运行。即,磁轴承单元21为一体地包含第一径向磁轴承40与推力磁轴承60的单一的单元。若如此构成,则不仅可将马达30与第二径向磁轴承50统合为单一的马达单元22,进而可将第一径向磁轴承40与推力磁轴承60统合为单一的单元。即,可将之前分别设置的马达30、第一径向磁轴承40、第二径向磁轴承50及推力磁轴承60四个单元统合为磁轴承单元21与马达单元22两个单元。其结果为,可减少在轴向排列的单元数,故而可有效地抑制真空泵100的轴向尺寸。
另外,本实施形态中,如上文所述,磁轴承单元21具有构成第一径向磁轴承40的第一线圈41、构成推力磁轴承60的推力线圈61、以及产生与第一径向磁轴承40及推力磁轴承60的两者相互作用的磁通42a的磁石部42。若如此构成,则可使用共同的磁石部42,分别产生径向方向的支撑力47(参照图6)与推力方向的支撑力64(参照图7)。因此,与分别设置磁石部42的情形相比,可使磁轴承单元21小型化,可削减零件数。
另外,本实施形态中,如上文所述,旋转体10在旋转轴11上具有重心16,在旋转轴11的轴向,磁轴承单元21的第一线圈41的中心25a较马达单元22的第二线圈51的中心26a更接近旋转体10的重心16。若如此构成,则磁轴承单元21配置于较马达单元22更接近旋转体10的重心16的位置。因此,关于旋转体10的径向方向的支撑,由磁轴承单元21(第一径向磁轴承40)所得的支撑力的作用相对变大,由马达单元22(第二径向磁轴承50)所得的支撑力的作用相对变小。而且,对于磁轴承单元21而言,无需与马达单元22不同而考虑马达30的结构,可采用优先轴承性能的结构。因此,可将可容易地确保轴承性能的磁轴承单元21设为主轴承,将由马达单元22(第二径向磁轴承50)所得的支撑设为次轴承,故而即便在将马达30与第二径向磁轴承50统合的情形时,也可容易地确保高的轴承性能。
另外,本实施形态中,如上文所述,磁轴承单元21的轴向的形成范围97、与旋转体10的重心16的轴向的位置重叠。若如此构成,则可使由磁轴承单元21(第一径向磁轴承40)所得的支撑力47更有效地作用于旋转体10。因此,磁轴承单元21(第一径向磁轴承40)的支撑力47小便可,故而可实现磁轴承单元21的小型化。另外,对于马达单元22(第二径向磁轴承50)而言,只要可抑制旋转体10的旋转轴11绕重心16倾斜即可,故而可减小必要的支撑力55。因此,可将马达单元22设为更优先马达30性能的结构,故而可实现轴向尺寸的小型化并且容易地确保真空泵100的性能。
另外,本实施形态中,如上文所述,翼支撑部12具有自旋转轴11的第二端11b侧向第一端11a侧倾斜的锥形状部12a,磁轴承单元21在与旋转轴11的轴向正交的面内,配置于旋转轴11与锥形状部12a之间。若如此构成,则可在旋转体10中在旋转轴11的周围所确保的空间,形成锥形状的区域(收容空间15)。在所述情形时,可在具有第一外径91的磁轴承单元21不与锥形状部12a干扰的范围内,使磁轴承单元21尽量靠近第一端11a侧。越使磁轴承单元21靠近第一端11a侧,则越可使马达单元22也靠近第一端11a侧,因此可相应地抑制真空泵100的轴向尺寸。
另外,本实施形态中,如上文所述,磁轴承单元21在旋转轴11的轴向,配置于较锥形状部12a的第二端11b侧(Z2方向侧)的端部更靠第一端11a侧(Z1方向侧)的位置。若如此构成,则可在轴向在锥形状部12a的形成范围(长度95)内收容磁轴承单元21。因此,可进一步抑制真空泵100的轴向尺寸。
另外,本实施形态中,如上文所述,还包括收容旋转体10及旋转机构20的外壳4,旋转翼13与外壳4之间构成第一泵结构3a,旋转体10包含自翼支撑部12向旋转轴11的第二端11b侧延伸且与外壳4之间构成第二泵结构3b的圆筒部14,马达单元22的至少一部分配置于由翼支撑部12的内周面及圆筒部14的内周面所划分的收容空间15内。若如此构成,则可在形成于旋转体10的旋转轴11与翼支撑部12及圆筒部14之间的、收容空间15的内部,以收容马达单元22整体的方式配置马达单元22,或者即便马达单元22伸出至收容空间15的外部,也可抑制伸出量。因此,可有效地抑制真空泵100的轴向尺寸。
另外,本实施形态中,如上文所述,圆筒部14具有连接于翼支撑部12的第一圆筒端部14a、及旋转轴11的轴向的与翼支撑部12为相反侧的第二圆筒端部14b,在轴向,马达单元22配置于较圆筒部14的第二圆筒端部14b更靠第一圆筒端部14a侧。若如此构成,则可在形成于旋转体10的旋转轴11与翼支撑部12及圆筒部14之间的、收容空间15的内部,收容马达单元22整体。因此,可更有效地抑制真空泵100的轴向尺寸。
[变形例]
再者,应认为本次公开的实施形态在所有方面为例示而非限制性。本发明的范围是由权利要求书而非所述实施形态的说明来表示,还包含与权利要求书均等的含意及范围内的所有变更(变形例)。
所述实施形态中,表示了下述例子,即:将磁轴承单元21构成为一体地包含第一径向磁轴承40与推力磁轴承60的单一的单元,通过磁轴承单元21及马达单元22两个单元来构成旋转机构20,但本发明不限于此。图8~图10所示的变形例中,表示分别设置包含第一径向磁轴承的磁轴承单元、与推力磁轴承的例子。因此,图8~图10中,表示通过磁轴承单元、马达单元及推力磁轴承三个单元来构成旋转机构的例子。
图8所示的变形例的真空泵100中,包括包含第一径向磁轴承40的磁轴承单元121代替磁轴承单元21(参照图1)。与图1的结构例不同,在磁轴承单元121未设置推力磁轴承60。真空泵100包括与磁轴承单元121分别设置的推力磁轴承60。因此,磁轴承单元121、马达单元22及推力磁轴承60在轴向排列配置。推力磁轴承60相对于磁轴承单元121及马达单元22而配置于轴向的第二端11b侧,但也可配置于磁轴承单元121与马达单元22之间。
关于磁轴承单元121,可采用公知的径向磁轴承的结构。图9的例子中,第一径向磁轴承40包含形成有多个齿143a的第一轴承芯143、及安装于各齿143a的多个第一线圈41。第一线圈41在八根齿143a各自设有合计八个。八个第一线圈41中,邻接的两个第一线圈41通过同一卷线而串列连接,构成四个群。各群的第一线圈41通过电流供给而产生穿过其中一个齿143a、间隙、第一芯部44(旋转轴11)、另一个齿143a的磁通41a(参照图9的实线部)。第一径向磁轴承40通过控制各群的第一线圈41所产生的磁通41a的强度,而对旋转轴11赋予径向方向中任意方向的支撑力。
图9所示的变形例的马达单元22的结构与所述实施形态同样(参照图4),故而省略说明。
如图10所示,推力磁轴承60包括推力线圈61、具有第一端面62a及第二端面62b的推力芯62、磁石部42以及轭165。偏置磁通42a自磁石部42的N极依序穿过推力芯62、间隙、第二芯部63、轴部11c(旋转轴11)、间隙、轭165,回到磁石部42的S极。推力磁轴承60通过推力线圈61的磁通61a、与分别穿过第一端面62a及第二端面62b的偏置磁通42a的相互作用,对旋转轴11赋予支撑力64,所述支撑力64朝向磁通61a与偏置磁通42a彼此相长的方向。
如此,变形例的真空泵100包括包含磁轴承单元21、马达单元22及推力磁轴承60三个单元的旋转机构20。
(其他变形例)
另外,所述实施形态中,表示了马达单元22具有马达线圈31及第二线圈51两种线圈的例子,但本发明不限于此。马达单元也可包括仅一种线圈。即,图4中,也可配置单一的线圈代替配置于同一狭槽32c的(卷绕于同一齿32a的)马达线圈31及第二线圈51。在所述情形时,例如将向各线圈的电流供给时序分时,在第一时序,以产生用以作为马达30而运行的扭矩的方式进行对线圈的电流控制。继而,在第二时序,以产生作为第二径向磁轴承50的支撑力55的方式进行对线圈的电流控制。通过交替设置第一时序与第二时序进行切换,从而可利用一种线圈使马达单元作为马达30与第二径向磁轴承50的两者而运行。除此以外,也可通过dq轴控制来控制马达单元的供给电流,通过供给在线圈的电流的d轴成分产生第二径向磁轴承50的支撑力55,通过q轴成分产生马达30的扭矩。
另外,所述实施形态中,表示了设有推力磁轴承60的例子,但本发明不限于此。本发明中,也可设置磁轴承以外的推力轴承代替推力磁轴承60。推力轴承例如可为机械轴承,也可为流体轴承。推力磁轴承60也可包含在推力圆盘的轴向两侧配置一对线圈的类型的推力磁轴承。
另外,所述实施形态中,表示了将磁轴承单元21的第一线圈41的中心25a配置于较马达单元22的第二线圈51的中心26a更接近旋转体10的重心16的位置的例子,但本发明不限于此。本发明中,也可将马达单元22的第二线圈51的中心26a配置于较磁轴承单元21的第一线圈41的中心25a更接近旋转体10的重心16的位置。在所述情形时,优选为以马达单元22的第二线圈51的中心26a、与旋转体10的重心16的轴向的位置彼此重叠的方式构成。在所述情形时,使马达单元22的第二径向磁轴承50主要进行旋转体10的径向方向的支撑,磁轴承单元21只要仅产生用以防止旋转轴11的倾斜的支撑力便可。因此,可使磁轴承单元21小型化,可相应地靠近旋转轴11的第一端11a而配置。
另外,所述实施形态中,表示了磁轴承单元21的轴向的形成范围97、与旋转体10的重心16的轴向的位置彼此重叠的例子,但本发明不限于此。旋转体10的重心16也可配置于较磁轴承单元21的轴向的形成范围97更靠第一端11a侧的位置或更靠第二端11b侧的位置。
另外,所述实施形态中,表示了在翼支撑部12设有锥形状部12a的例子,但本发明不限于此。翼支撑部12例如也可以内径自第一端11a侧向第二端11b侧阶段性地增大的方式形成。在所述情形时,在翼支撑部12未形成锥形状部12a,故而磁轴承单元21也无需配置于旋转轴11与锥形状部12a之间。
另外,所述实施形态中,表示了磁轴承单元21在旋转轴11的轴向,配置于较锥形状部12a的Z2方向侧的端部更靠Z1方向侧的位置的例子,但本发明不限于此。磁轴承单元21的至少一部分也可配置于较锥形状部12a的Z2方向侧的端部更靠Z2方向侧的位置。
另外,所述实施形态中,表示了真空泵100为包括第一泵结构3a及第二泵结构3b的复合型的真空泵的例子,但本发明不限于此。本发明中,也可不设置第二泵结构3b。即,真空泵也可为并非复合型的涡轮分子泵。在所述情形时,也可不将构成第二泵结构3b的圆筒部14及泵定子73设于真空泵100。
另外,所述实施形态中,表示了在轴向,马达单元22配置于较圆筒部14的第二圆筒端部14b更靠第一圆筒端部14a侧的例子,但本发明不限于此。马达单元22也可较圆筒部14的第二圆筒端部14b更向第二端11b侧(Z2方向侧)伸出。
另外,所述实施形态中所示的第一径向磁轴承40(参照图6)及第二径向磁轴承50(参照图4)的结构仅为一例,并无特别限定。这些径向磁轴承的线圈数、线圈的配置、狭槽数、狭槽的配置(齿的配置)、芯部的形状等为任意,可变更。
[形态]
本领域技术人员理解,所述例示的实施形态为以下形态的具体例。
(项目1)
一种真空泵,包括:
旋转体,包含旋转轴、翼支撑部及旋转翼,所述旋转轴具有第一端及第二端,且在轴向延伸,所述翼支撑部连接于所述旋转轴的所述第一端,且以在所述旋转轴的轴向,内径自所述第一端侧向所述第二端侧扩大的方式延伸,所述旋转翼设于所述翼支撑部的外周面;以及
旋转机构,包含将所述旋转体旋转驱动的马达、在径向支撑所述旋转体的第一径向磁轴承及第二径向磁轴承、及在轴向支撑所述旋转体的推力轴承,
所述旋转机构包含:
磁轴承单元,在所述旋转轴与所述翼支撑部之间设于所述旋转轴的周围,具有第一外径,能够作为所述第一径向磁轴承而运行;以及
马达单元,以较所述磁轴承单元更靠所述旋转轴的所述第二端侧的位置设于所述旋转轴的周围,具有大于所述第一外径的第二外径,能够作为所述马达与所述第二径向磁轴承的两者而运行。
(项目2)
根据项目1所记载的真空泵,其中所述磁轴承单元包含构成所述第一径向磁轴承的第一线圈,
所述马达单元在与所述旋转轴的轴向正交的面内,具有构成所述马达的马达线圈、构成所述第二径向磁轴承的第二线圈、以及分别卷绕有所述马达线圈及所述第二线圈的定子芯。
(项目3)
根据项目1或项目2所记载的真空泵,其中所述推力轴承为设于所述旋转轴的周围的推力磁轴承,
所述推力磁轴承包含分别产生在轴向穿过所述旋转轴的磁通的磁石部及推力线圈,以通过所述磁石部的磁通与所述推力线圈的磁通的相互作用而对所述旋转轴产生推力方向的支撑力的方式构成。
(项目4)
根据项目3所记载的真空泵,其中所述磁轴承单元进而能够作为所述推力磁轴承而运行。
(项目5)
根据项目4所记载的真空泵,其中所述磁轴承单元具有构成所述第一径向磁轴承的第一线圈、构成所述推力磁轴承的所述推力线圈、以及产生与所述第一径向磁轴承及所述推力磁轴承的两者相互作用的磁通的所述磁石部。
(项目6)
根据项目2所记载的真空泵,其中所述旋转体在所述旋转轴上具有重心,
在所述旋转轴的轴向,所述磁轴承单元的所述第一线圈的中心较所述马达单元的所述第二线圈的中心更接近所述旋转体的重心。
(项目7)
根据项目6所记载的真空泵,其中所述磁轴承单元的所述轴向的形成范围、与所述旋转体的重心的所述轴向的位置重叠。
(项目8)
根据项目1至项目7中任一项所记载的真空泵,其中所述翼支撑部具有自所述旋转轴的所述第二端侧向所述第一端侧倾斜的锥形状部,
所述磁轴承单元在与所述旋转轴的轴向正交的面内,配置于所述旋转轴与所述锥形状部之间。
(项目9)
根据项目8所记载的真空泵,其中所述磁轴承单元在所述旋转轴的轴向,配置于较所述锥形状部的所述第二端侧的端部更靠所述第一端侧的位置。
(项目10)
根据项目1至项目9中任一项所记载的真空泵,还包括:外壳,收容所述旋转体及所述旋转机构,
所述旋转翼与所述外壳之间构成第一泵结构,
所述旋转体包含:圆筒部,自所述翼支撑部向所述旋转轴的所述第二端侧延伸,与所述外壳之间构成第二泵结构,
所述马达单元的至少一部分配置于由所述翼支撑部的内周面及所述圆筒部的内周面所划分的收容空间内。
(项目11)
根据项目10所记载的真空泵,其中所述圆筒部具有连接于所述翼支撑部的第一圆筒端部、及所述旋转轴的轴向的与所述翼支撑部为相反侧的第二圆筒端部,
在所述轴向,所述马达单元配置于较所述圆筒部的所述第二圆筒端部更靠所述第一圆筒端部侧。
(其他形态)
另外,所述实施形态也可为以下形态的具体例。
(项目12)
一种真空泵,包括:
轴,沿中心轴线延伸;
多个动翼,连接于所述轴,能够绕所述轴的所述中心轴线与所述轴一起旋转;
多个静翼,以与所述多个动翼在轴向交替排列的方式配置;
第一径向磁轴承,在半径方向邻接于所述轴的第一轴向位置,以在所述第一轴向位置产生用以调整所述轴的半径方向的位置的磁力的方式构成;
马达,包含马达转子及马达定子,所述马达转子固定于所述轴的第二轴向位置,所述马达定子在半径方向与所述马达转子邻接,使所述马达转子、所述轴及所述多个动翼旋转;
第二径向磁轴承,在半径方向邻接于所述轴的所述第二轴向位置,以在所述第二轴向位置产生用以调整所述轴的半径方向的位置的磁力的方式构成;以及
推力磁轴承,以产生第三磁力而产生用以调整所述轴的轴向的位置的磁力的方式构成,
所述第一径向磁轴承具有第一直径,
所述第二径向磁轴承或所述马达具有大于所述第一直径的第二直径,
所述第一轴向位置较所述第二轴向位置更接近所述多个动翼。
[符号的说明]
3a:第一泵结构
3b:第二泵结构
4:外壳
10:旋转体
11:旋转轴
11a:第一端
11b:第二端
12:翼支撑部
12a:锥形状部
13:旋转翼
14:圆筒部
14a:第一圆筒端部
14b:第二圆筒端部
15:收容空间
16:重心
20:旋转机构
21、121:磁轴承单元
22:马达单元
25a:第一线圈的中心
26a:第二线圈的中心
30:马达
31:马达线圈
32:定子芯
40:第一径向磁轴承
41:第一线圈
42:磁石部
50:第二径向磁轴承
51:第二线圈
60:推力磁轴承
61:推力线圈
91:第一外径
92:第二外径
93、94:内径
100:真空泵。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。