1.本发明涉及位置或扭矩磁性传感器领域,该位置或扭矩磁性传感器包括磁化部分,该磁化部分可相对于用于朝向其中容纳有磁敏探针例如霍尔探针的气隙收集磁通量的结构件移动。相对移位可以是旋转的或线性的,或者甚至可以沿着任何轨迹。这种传感器特别地用于汽车领域,例如用以检测轴的位置或包括扭转轴的转向柱的位置,或者用于自动机械领域。
2.磁敏探针灵敏度的提高和使用这种传感器的环境中的电磁干扰源的增加导致由这种传感器递送的电信号的可靠性问题不断增加。事实上,该信号不仅是由传感器的磁化部分产生的磁场的图像,而且也是来自外部干扰源的所有磁场和电磁场的图像。
3.本发明的目的是减少这种干扰的影响。
现有技术
4.为了防止磁性传感器检测由外部磁场引起的磁通量从而妨碍精确检测,专利de102012014208提出了一种扭矩传感器,其用于检测在由第一轴元件和第二轴元件形成的旋转元件中产生的扭矩,第一轴元件和第二轴元件两者经由扭力杆连接。
5.专利申请jp2009020064也是已知的,其旨在提供一种尺寸减小并且效率显著提高的扭矩传感器。该扭矩传感器包括:第一轴和第二轴,第一轴和第二轴经由连接轴同轴连接;环形永磁体,该环形永磁体固定至第二轴并且在周向上磁化有若干极;传感器磁轭,该传感器磁轭固定至第一轴并且与永磁体形成磁路;集磁器磁轭,该集磁器磁轭沿轴向方向安置在传感器磁轭的相对于永磁体的另一侧部上,并且与永磁体和传感器磁轭形成磁路;以及磁通量传感器,其用于检测由传感器磁轭和集磁器磁轭引起的磁通量。扭矩传感器基于来自磁通量传感器的输出而检测施加至第一轴和第二轴中的一者的扭矩。传感器磁轭由布置在同一平面上或基本上布置在同一平面上的多个爪极构成,并且这些爪极中的至少一些爪极彼此分开形成。
6.现有技术的缺点
7.可以设想的解决方案包括通过增加磁体的尺寸或磁体的剩磁(br)来增加有用磁场,使得有可能在一定程度上削弱干扰的影响,但代价是传感器的紧凑性的损失和成本的增加。
8.添加位于探针附近的屏蔽或构造围绕传感器的盒子也是一种已知的技术,但其涉及额外的部件,这些部件通常体积庞大,或者甚至因高渗透率而由昂贵的材料制成。该技术通常还伴随着因泄漏路径的产生而造成的有用磁场的损失。
9.包括提供额外的磁屏蔽件的解决方案并不令人满意,因为这些解决方案导致相比于普通传感器包括更多数目的部件的传感器,并且导致更高的制造和组装成本。
10.本发明提供的解决方案
11.为了应对这些缺点,本发明并不是在如本领域技术人员所做的那样针对外部干扰场建立磁屏蔽,而是在每个磁通量收集结构件上为该干扰场建立两个收集区,分别称为初
级收集区和次级收集区,这两个收集区以与测量气隙相关的特定方式布置。
12.本发明的原理实际上包括将收集场带入测量气隙中,但是是沿两个不同的流动方向,最终使得可以消除干扰场的整体分量。从这个视角来看,优先地但非限制性地寻求在初级收集区收集与在次级收集区一样多的干扰场,并且由于这两个区的相对定位而在气隙处相对于彼此反转这两个场,同时使该气隙中的有用通量最大化。
13.更具体地,通过将初级收集区定位在限定气隙的横向中间平面的一个侧部上并且将次级收集区定位在限定气隙的横向中间平面的另一侧部上,磁场的反转区通过结合两个通量收集结构件而建立,该反转区使所收集磁场的方向反转穿过气隙。由第一收集结构件的初级收集区和次级收集区收集的通量与由第二结构件的初级收集区和次级收集区收集的通量配合而被消除或最小化,如在不同的图中将更好理解的。
14.本发明在其最一般的意义上涉及一种位置传感器,该位置传感器特别地设计成用以检测转向柱中的扭转,该位置传感器由包括多个磁体的第一磁化磁性转子结构件和限定其中定位有至少一个磁敏元件的至少一个气隙的两个通量收集部件构成,其特征在于,每个收集部件均具有至少一个初级收集区,所述至少一个初级收集区位于磁通量的收集区中并且延伸有具有至少一个次级收集区的至少一个延伸部,所述次级收集区以形成所述气隙的两个极的平坦底板结束,并且所述气隙的横向中间平面与所述延伸部中的至少一个延伸部相交。
15.在变型实施方式中:
16.‑
至少一个齿圈与磁化结构件相对地定位;
17.‑
所述中间平面平行于初级收集区的平面;
18.‑
所述初级收集区平行于次级收集区;
19.‑
所述延伸部轴向地且与所述初级收集区的平面垂直地延伸超出所述横向中间平面;
20.‑
次级收集区的总面积等于初级收集区的总面积;
21.‑
该变型实施方式还包括感测所述转向柱中的扭转的传感器,该传感器由包括多个磁体的第一磁化磁性转子结构件和限定其中定位有至少一个磁敏元件的至少一个气隙的两个通量收集部件构成,每个收集部件均具有至少一个初级收集区,所述至少一个初级收集区延伸有具有至少一个次级收集区的至少一个延伸部,所述次级收集区以形成所述气隙的两个极的平坦底板结束,并且所述气隙的横向中间平面与所述延伸部中的至少一个延伸部相交。
22.本发明还涉及一种用于检测转向柱的绝对位置的装置,其特征在于,该装置进一步包括感测所述转向柱中的扭转的传感器,该传感器由包括多个磁体的第一磁化磁性转子结构件和限定其中定位有至少一个磁敏元件的至少一个气隙的两个通量收集部件构成,每个收集部件均具有至少一个初级收集区,所述至少一个初级收集区延伸有具有至少一个次级收集区的至少一个延伸部,所述次级收集区以形成所述气隙的两个极的平坦底板结束,并且所述气隙的横向中间平面与所述的延伸部中的至少一个延伸部相交。
23.本发明的非限制性示例的具体实施方式
24.参照附图阅读本发明的非限制性示例的以下具体实施方式,将更好地理解本发明,在附图中:
25.‑
【图1】图1示出了根据本发明的传感器的第一示意性示例的立体图;
26.‑
图2a、图2b、图2c、图2d图2e和图2f示出了根据本发明的传感器的其他示意性示例;
27.‑
【图3a至图3b】图3a和图3b分别从上方和下方以立体图示出了根据本发明的传感器的变型;
28.‑
【图4】图4示出了角度传感器的另一实施方式的立体图;
29.‑
【图5至图19】图5至图19全部示出了根据本发明的传感器的变型实施方式的立体图,该传感器改进了现有技术的若干传感器;
30.‑
【图20】图20示出了与绝对位置传感器相关联的根据本发明的角度传感器的一个实施方式的立体图;
31.‑
【图21至图22】图21图22示出了将初级收集区附接至次级收集区的方法。
32.将参照图1、图2a、图2b、图2c和图2d中所图示的示意图以及特别地参照图3a和图3b中示出的实施方式来描述磁性原理,该实施方式被选为示例。在其余的图中图示的变型实施方式重复了在这些第一图中所阐述的相同原理。
33.第一变型实施方式的描述
34.图1示出了本发明的一个实施方式的示意性截面图,以说明磁性操作原理。传感器由磁化结构件100以已知的方式构成,该磁化结构件100可相对于由至少两个部件210、220形成的第二结构件移动,这两个部件210、220由软铁磁材料制成、构成主通量收集器并且与所述磁化结构件100相对地布置。
35.本发明适用于磁化结构件100与第二结构件之间的任何类型的组合,该第二结构件具有可以是线性的或成角度的相对移位以及用于测量位置或角扭矩的盘状或管状几何形状。
36.磁化结构件100被确定成根据其相对于第二结构件的位置来调节穿过该第二结构件的有用感应场101。为此,已知不同的配置,例如:具有交替的磁化方向的磁体的并置、其中容纳有沿交替方向被极化的磁体的结构件、具有角度可变的磁化或具有强度沿着轨迹变化的磁化的磁体。
37.该有用感应场101由布置在所述磁化结构件100的前面的两个软铁磁部件210、220收集,每个软铁磁部件均包括延伸有通量集中片212、222的初级通量收集区211、221。初级通量收集区211、221布置成被由所述磁化结构件100建立的有用场101以及被干扰场穿过。出于简化该示意性图示的原因,没有示出相当于齿圈130、140的中间部件,齿圈130、140在图3至图19中示出并且用于改善磁通量的收集并将磁通量朝向初级收集区211、221引导。
38.该感应场101由软铁磁材料制成的初级通量收集区211、221收集,初级通量收集区具有在此垂直于感应场101的方向——但该取向绝不是限制性的——的收集表面,并且具有与由磁化结构件100的垂直于磁化的主要分量的面扫过的区域对应的形状。这些初级通量收集区211、221布置在磁化结构件100的任一侧上。明确说明的是,磁化结构件100的磁化方向不是限制性的并且在此通过简化示例的方式给出。磁化方向和磁化结构件的形状可以是不同的。
39.通量集中片212、222的前端部213、223限定其中容纳霍尔探针300的气隙,以便形成磁场线在其中循环的磁路。由霍尔探针测量的磁感应是穿过初级通量收集区211、221的
磁场的直接函数。分别延伸有延伸部216、226的每个初级收集区211、221可以通过对由铁磁材料制成的部件进行切割和弯曲而产生。
40.本发明的目的是减少由虚线箭头111至114表示的、穿过初级通量收集区211、221的磁干扰场的发生。还可以具有与在此呈现的竖向取向不同的取向的这些干扰场111至114像由磁化结构件100产生的有用场100一样由初级通量收集区211、221收集,并且因此这些干扰通量在测量探针300处被发现,就像有用通量100一样。这些干扰场同样因收集器和集中器的软铁磁材料而被集中效应放大;因此,根据近似于以下等式的关系,由探针测量的值将比所施加的干扰场大:测量感应=(有用感应 干扰感应)
×
放大系数。
41.本发明所提出的解决方案包括通过使测量探针300处的干扰通量的方向反转来建立补偿。为此,设置了次级收集区214、225。
42.本文件中所呈现的不同变型以非限制性的方式提出了使得可以实现对其中定位有测量探针300的气隙处的干扰通量的这种补偿的实施方式。在最佳实施方式中,干扰通量的反向收集理想地与干扰通量的直接收集相同,以便完全消除测量探针300处的干扰,但是在本发明的框架内,实现完全的消除不是绝对必要的。
43.在图1所图示的示例中,次级收集区214、225由平行于初级收集区211、221定向的区域构成,并且具有与初级收集区211、221的累积面积基本上相同的累积面积。
44.气隙具有位于所述初级收集区211、221中的一个初级收集区与由所述相关联的集中片212、222的前端部213、223限定的平面218、228中的一个平面之间的中间平面350。前端部213、223形成在相对于所述初级收集区211、221位于所述中间平面350的后面的弯曲区217、227的端部处,所述中间平面350在所述初级收集区211、221与所述次级收集区214、225之间的水平216、226处与所述集中片相交。
45.示意性变型实施方式的描述
46.图2a示出了本发明的另一实施方式的示意性截面图,以说明磁性操作原理。在该示例中,磁干扰通量111至114的反转由两个次级收集区214、224执行,这两个次级收集区214、224通过额外的通量集中器244、254连接至初级收集区211、221的前区213、223,通量集中器244、254构造成在探针300处的气隙中使由次级收集区214、224收集的通量的方向相对于由初级收集区211、221收集的通量的方向反转。为此,铁磁部件中的至少一个铁磁部件必须使得测量气隙位于所述部件的初级收集区与次级收集区之间。
47.图2b示出了本发明的具有次级收集区214、225的另一实施方式的示意性截面图。在该版本中,初级收集区211、221轴向地延伸有通量集中片216、226,通量集中片216、226又水平地延伸有次级收集区214、225。定位有探针300的测量气隙被限定在所述次级收集区214、225之间。在该示例中,气隙的中间平面350位于初级收集区211、221与次级收集区214、225之间。上述引用的元件的竖向取向和水平取向绝不是限制性的并且可以考虑不同的取向,其目的是使测量气隙中的干扰通量的流动方向反转。
48.图2c示出了本发明的另一实施方式的示意性截面图,其示出了仅须具有至少一个铁磁部件210,使得其中定位有探针300的气隙位于所述部件210的初级收集区211与次级收集区214之间。
49.图2d示出了本发明的使用两个探针300、301的另一实施方式的示意性截面图。此外,该构型类似于在图18a和图18b中以更现实的方式示出的构型,探针的径向定位在那里
被其间具有角度空间的探针的共径向定位所替代。初级收集区211、221分别延伸有两个集中片216、219和一个集中片226,每个集中片以次级收集区214、215和224、225结束。探针300、301定位于所述次级收集区214、215和224、225之间的气隙中。对于每个部件210、220,气隙位于初级收集区211、221与次级收集区214、215和224、225之间。
50.图2e示出了本发明的另一实施方式的示意性截面图,对于该实施方式,限定了初级收集区211、221的收集表面211b、221b和次级收集区214、224的收集表面214b、224b。该图示出了正交于所述收集表面211b、214b、221b、224b的平面中的横截面,所述收集表面211b、214b、221b、224b分别由这些表面中的每个表面处的中间平面pp1、ps1、pp2、ps2限定。因此,该示意图图示了初级收集区211、221的表面211b、221b的中间平面不一定平行于次级收集区214、224的表面214b、224b的中间平面;在此,平面pp1、ps2形成非零角度α。该示例是非限制性的,并且提供了能够形成非零角度的所述平面pp1、ps1、pp2、ps2的任何其他组合。然而,当平面pp1和ps2或pp2和ps1形成小角度、即α<45度时,补偿是有利的;由于当这些组合都涉及正交平面时补偿为零,我们排除了这种可能性。最后,引入中间平面以便包括收集区211、214、221、224的弯曲或凹凸不平的收集表面,因此表面的中间平面通过使所述表面与所述中间平面之间的距离在该表面的任何点处最小化来限定。
51.图2f示出了本发明的另一实施方式的示意性截面图。该实施方式与图2e中示出的前一个图的不同之处在于,收集区211、214、221、224具有用于干扰通量的若干收集表面211b、211c、214b、214c、221b、221c、224b、224c。该示意图是沿着正交于所述表面的方向的横截面图。干扰通量的额外的收集表面211c、214c、221c、224c分别由中间平面pp1’、ps1’、pp2’、ps2’限定,并且像在先前实施方式中在平面pp1、ps1、pp2、ps2之间限定的关系一样,这些平面之间建立了角度关系。因此,如果以下关系中的一个关系为真,则平面pp1’和ps2’不正交或者平面pp2’和ps1’不正交。在本文件的其余部分中,与收集区相关联的收集表面将根据标识所述区的编号由字母a、b、c或d指示。因此,出于清楚的目的,图中不会系统地明确示出所有收集区,表面的指示足以识别该区。
52.角度传感器的第一实施方式的描述
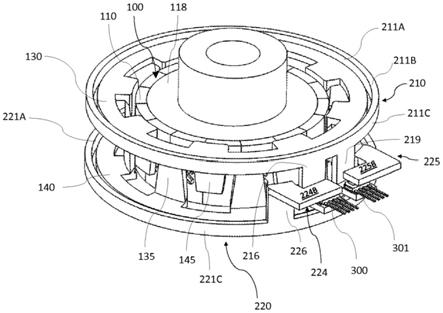
53.图3a和图3b示出了用于对配装至转向柱的扭转轴的几度(通常为 /
‑3°
、 /
‑6°
、 /
‑8°
)的行程进行测量的角度扭转传感器的实施方式。该传感器的基础类似于文件us20140130612中所呈现的基础,这是本发明在抗磁干扰场方面寻求改进的基础。
54.该传感器包括由具有2n对极(通常n=6、8、10或12)的筒形磁体110构成的磁化结构件100,这些极优选地——但非限制性地——被径向磁化以形成安装在与磁体具有相同高度的筒形轭118上的套管。
55.根据该实施方式,磁化结构件100还包括两个齿圈130、140,这两个齿圈面对彼此安装并且成角度地偏移了与磁体110的极距对应的角度。每个齿圈130、140均具有呈筒形部分的形式的n个齿135、145,这些齿轴向定向以与磁体110的外部面一起工作。齿在此处示出了从传感器的轴线观察的角度宽度,该角度宽度在齿根处增加,以便增大齿根中的通量通过截面。
56.这些齿圈130、140将通量从磁化结构件100穿过环形气隙传输至在该示例中由在此呈环或圈的形式的铁磁部件210、220形成的主要收集区。部件210、220一方面具有用于来自磁化结构件100的有用通量的径向收集表面211a、221a,并且另一方面具有收集有用通量
的一部分但尤其是收集外部干扰通量的轴向收集表面211b、221b。外表面211c、221c主要参与收集干扰通量。
57.部件210、220各自分别延伸有两个集中片216、219和226、229,并且使得可以将通量集中和引导到两个测量气隙中,测量气隙径向地位于集中区216、218和226、228的外部,并且两个磁敏元件300、301定位在测量气隙中并且由未示出的印刷电路保持。在该示例中使用的气隙和磁敏元件的数目——但是更一般地在所有呈现的示例中——可以是能够根据期望的信号的冗余变化的。实际上,这些传感器中通常使用一个、两个或三个探针。
58.部件220的次级收集区224、225由沿与收集表面221b的平面平行的平面延伸的两个上部横向区域224b、225b形成,并且位于穿过其中安置有霍尔探针300、301的气隙的横向中间平面的后面。因此,该中间平面安置于以下两个平面之间:
59.‑
延伸有相关联的集中片226、229的初级收集扇区221b的平面;
60.‑
与初级收集扇区221b的所述平面平行的相关联的次级收集区域224b、225b的平面。
61.这三个平面221b、224b、225b在所描述的示例中是平行的,但是在不脱离本发明的范围的情况下它们或它们中的一者可以是倾斜的。气隙的中间平面与集中片226、229相交。
62.类似地,部件210的次级收集区214、215由沿与初级收集表面211b的平面平行的平面延伸的两个上部横向区域214b、215b形成,并且位于穿过其中安置有霍尔探针300、301的气隙的横向中间平面的后面。因此,该中间平面安置于以下两个平面之间:
63.‑
延伸有相关联的集中片216、219的初级收集扇区211b的平面;
64.‑
与初级收集扇区211b的所述平面平行的相关联的次级收集区域214b、215b的平面。
65.这三个平面211b、214b、215b在所描述的示例中是平行的,但是在不脱离本发明的范围的情况下它们或它们中的一者可以是倾斜的。气隙的中间平面与集中片216、219相交。
66.角度传感器的若干实施方式的描述
67.图4图示了本发明应用于如文件us20140283623中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有单个探针300的测量气隙引导。
68.所述铁磁部件210、220由初级收集表面211a、221a形成,初级收集表面211a、221a在其内部上收集磁化结构件100的有用通量并且在其边缘和其外部上收集外部干扰通量。初级收集表面211b、221b主要收集干扰通量的轴向分量,这些表面延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、225之间以及沿相反方向穿过收集区211b、221b被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
69.图5a和图5b图示了本发明应用于如文件us20090027045中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有一个或两个探针300、301的测量气隙引导。环130、140的齿135、145在此径向延伸而不是如先前在图4中示出的那样轴向延伸。图5a具有单个测量探针300,并且图5b具有两个探针300、301,两个子变型之间的功能除此之外保持相同。
70.所述铁磁部件210、220由初级收集表面211a、221a形成,初级收集表面211a、221a在其内部上收集磁化结构件100的有用通量并且在其外部上收集外部干扰通量。初级收集区211、221的次级收集表面211b、221b收集有用通量和干扰通量,这些表面延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有探针300、301的次级收集区214、224、215、225为止。干扰通量沿直接方向在次级收集区214、224、215、225之间以及沿相反方向穿过收集区211、216、221、226被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
71.图6图示了本发明应用于如文件jp200920064中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有单个探针300的测量气隙引导。在该示例中,磁化结构件定位在齿圈130、140下方。
72.所述铁磁部件210、220由初级收集表面211b、221b形成,初级收集表面211b、221b在其内部上收集磁化结构件100的有用通量并且在其外部上收集外部干扰通量。这些表面211b、221b延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211b、216、221b、226被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
73.图7图示了本发明应用于如文件kr20120010696中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有单个探针300的测量气隙引导。在该示例中,圈130、140的齿135、145成角度地倾斜。
74.所述铁磁部件210、220由初级收集区211、221的收集表面211b、221b形成,收集表面211b、221b在其内部上收集磁化结构件100的有用通量并且在其外部上收集外部干扰通量。这些表面211b、221b延伸有集中片216、219、226,直到集中片216、219、226在其端部处形成其间定位有探针300、301的次级收集区214、215、224、225为止。干扰通量沿直接方向在次级收集区214、215、224、225之间以及沿相反方向穿过收集区211、216、219、221b、226被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
75.图8图示了本发明应用于如文件jp2012058249中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有单个探针300的测量气隙引导。在该示例中,圈130、140是平坦的并且没有切割齿,并且有用通量的收集是轴向完成的,类似于图1的示意图。
76.所述铁磁部件210、220由初级收集表面211b、221b形成,初级收集表面211b、221b在其内部上收集磁化结构件100的有用通量并且在其外部上收集外部干扰通量。这些表面211b、221b延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211b、221b、216、226被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
77.图9图示了本发明应用于如文件jp2016090492中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于圈130、140移动,从而将通量朝向铁
磁集中部件210、220和其中定位有单个探针300的测量气隙引导。在该示例中,圈130、140是平坦的并且没有齿。
78.所述铁磁部件210、220由初级收集表面211b、221b形成,初级收集表面211b、221b在其内部上收集磁化结构件100的有用通量并且在其外部上收集外部干扰通量。这些表面211b、221b延伸有集中片216、不可见的226,直到集中片216、不可见的226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211、216、226、221被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
79.图10图示了本发明应用于如文件us20090078058中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有三个探针300、301、302的测量气隙引导。在该示例中,铁磁部件210、220相比于齿圈130、140具有更大的轴向厚度。
80.所述铁磁部件210、220由初级收集表面211a、221a形成,初级收集表面211a、221a在其内部上收集磁化结构件100的有用通量并且在边缘和其外部上收集外部干扰通量。这些表面211a、221a延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有三个探针300、301、302的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211、221被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
81.图11图示了本发明应用于文件kr976701中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有两个探针300、301的测量气隙引导。在该示例中,齿圈130、140被加倍以增大有用通量收集表面。
82.所述铁磁部件210、220由初级收集表面211、221形成,初级收集表面211、221在其内表面211a、221a上收集磁化结构件100的有用通量并且在其外表面211b、221b上收集干扰通量。这些表面211b、221b延伸有集中片216、219、226,直到集中片216、219、226在其端部处形成其间定位有两个探针300、301的次级收集区214、215、224、225为止。干扰通量沿直接方向在次级收集区214、215、224、225之间以及沿相反方向穿过收集区211、221被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
83.图12a和图12b图示了本发明应用于如文件kr987896中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于单个圈130移动,从而将通量朝向铁磁集中部件210、220和其中定位有单个探针300的测量气隙引导。在该示例中,圈130是单独的并且没有切割齿。图12a示出了传感器的分解图,并且图12b示出了传感器的组装图。
84.所述铁磁部件210、220由初级收集表面211a、221a形成,初级收集表面211a、221a收集磁化结构件100的有用通量并且在边缘和其外部上收集外部干扰通量。这些表面211a、221a延伸有表面211b、221b,并且接着延伸有集中片216、219、226,直到集中片216、219、226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211a、211b、221a、221b被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
85.图13图示了本发明应用于如文件wo2016032785中所呈现的传感器。像之前一样,
该传感器包括磁化结构件100,该磁化结构件能够相对于圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位了有两个探针300、301的测量气隙引导。在该示例中,齿圈130、140具有径向倾斜的齿135、145。
86.所述铁磁部件210、220呈环形件的形式并且由初级收集表面211b、221b形成,初级收集表面211b、221b收集磁化结构件100的有用通量并在其外部上收集干扰通量。这些表面211b、221b延伸有集中片(未标出),直到集中片在其端部处形成其间定位有两个探针300、301的次级收集区214、215、224、225为止。干扰通量沿直接方向在次级收集区214、215、224、225之间以及沿相反方向穿过收集区211b、221b被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
87.图14图示了本发明应用于如文件kr2016029991中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于圈130移动,从而将通量朝向铁磁集中部件210、220和其中定位有探针300的测量气隙引导。在该示例中,圈130是单独的并且具有径向延伸的齿135。
88.所述铁磁部件210、220呈扇形区的形式并且由初级收集表面211b、221b形成,初级收集表面211b、221b在其内部上收集磁化结构件100的有用通量并且在其外部上收集干扰通量。表面211b延伸有集中片216,直到集中片216形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211、221被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
89.图15图示了本发明应用于如文件jp6036220中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于两个圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有探针300的测量气隙引导。在该示例中,圈130、140的齿135、145轴向延伸并且在每个圈130、140之间是共线的。磁化结构件100被轴向极化。
90.所述铁磁部件210、220呈扇形区的形式并且由初级收集区211、221形成,初级收集区211、221在收集表面211a、221a上收集磁化结构件100的有用通量并且在收集表面211b、221b上收集干扰通量。收集区211、221延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211、221被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
91.图16图示了本发明应用于如文件us20160138983中所呈现的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于两个齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有探针300的测量气隙引导。在该示例中,圈130、140的齿135、145一起构成圈130、140。磁化结构件100被轴向极化并位于所述圈130、140的上方。
92.所述铁磁部件210、220呈扇形区的形式并且由初级收集区211、221形成,初级收集区211、221在收集表面211a、221a上收集磁化结构件100的有用通量并且在收集表面211b、221b上收集干扰通量。收集区211、221延伸有集中片216、226,直到集中片216、226在其端部处形成其间定位有探针300的次级收集区214、224为止。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211、221、216、226被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
93.图17图示了本发明应用于其探针平面300相对于前述描述轴向定向或以90
°
定向的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于两个齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有探针300的测量气隙引导。在该示例中,圈130、140的齿135、145一起构成圈130、140。由本发明提供的解决方案还使得可以使垂直于传感器的旋转轴线定向的外场的干扰最小化。
94.所述铁磁部件210、220呈扇形区的形式并且由收集磁化结构件100的有用通量的初级收集表面211a、221a形成。表面211b、221b在其端部处延伸有其间定位有探针300的次级收集区214、224。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211b、221b被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
95.图18a和图18b图示了本发明应用于如文件us8418570中所描述的传感器。像之前一样,该传感器包括磁化结构件100,该磁化结构件能够相对于两个齿圈130、140移动,从而将通量朝向铁磁集中部件210、220和其中定位有两个探针300、301的测量气隙引导。在该示例中,铁磁部件210、220呈两个部分,从而产生额外的气隙500、501。图18a是装置的完整视图,而图18b是铁磁部件210、220沿轴向平面被截断以更好地理解元件的形状的视图。
96.所述铁磁部件210、220呈扇形区的形式并且由初级收集表面211、221形成,初级收集表面211、221在其内部211a上收集磁化结构件100的有用通量并且在其边缘211b、221b和其外部211c、221c上收集干扰通量。区211、221在其端部处延伸有其间定位有两个探针300的次级收集区214、215、224、225。干扰通量沿直接方向在次级收集区214、215、224、225之间以及沿相反方向穿过收集区211、221被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
97.图19图示了本发明应用于如文件jp2016095281中所描述的传感器。所述铁磁部件210、220呈环形件的形式并且由收集磁化结构件100的有用通量和干扰通量的初级收集表面211b、221b形成。表面211b、221b延伸有集中片216、226,并且在集中片216、226的端部处延伸有其间定位有探针300的次级收集区214、224。干扰通量沿直接方向在次级收集区214、224之间以及沿相反方向穿过收集区211b、221b被引导到气隙中,所有这些都参与最小化或甚至消除测量气隙中的干扰通量。
98.图20示出了由本发明限定的位置传感器与绝对位置检测装置的组合。在该非限制性示例中,图3a、图3b中所限定的位置传感器与同文件wo2012084288中所描述的装置类似的装置相关联。使用了磁游标的测量原理的该装置意在确定转向柱的若干圈后的绝对位置。游标型装置特别地包括优选地紧固至磁化结构件100的主齿轮1000。因此,转向柱的旋转导致主轮1000的旋转,主轮1000的旋转又导致磁化行星轮1001、1002的旋转,这引起了磁敏探针1003、1004处的信号的演变。因此,可以获得在转向柱的若干次旋转后该转向柱的绝对角度位置。
99.当然可以设想将根据本发明的位置传感器的任何变型与任何绝对位置检测装置一起使用,图20的该示例在其实施方式中不以任何方式进行限制。
100.图21和图22图示了示出用于次级收集区214、224与初级收集区211、221之间的机械和磁性连接的实施方式的结构件。在侧部中的一个侧部上,次级收集区214、224在其端部处具有弯曲的u形部件2140、2240,从而允许通过“夹”在延伸部216、226的平坦端部上而进
行连接。在另一侧部上,次级收集区214、224具有与延伸部216、226的平坦端部接触的平坦表面2141、2241,从而允许通过焊接在接触处而进行连接。u形不是限制性的,可以想到使用互补形状的其他夹持模式,从而通过机械变形来保证保持。
101.当然可以设想使用所呈现或所建议的固定方法的任何组合,图21和图22中的不同固定方法的使用仅意在说明变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。