1.本发明属于砂浆站领域,尤其涉及一种移动式微型砂浆站配料方法,还涉及一种移动式微型砂浆站配料系统。
背景技术:
2.砂浆是建筑工程中用途广泛的一种建筑材料。水泥一般通过混凝土和砂浆应用到建筑工程中,由于砂浆通常作为辅助材料,用于表面处理或砌体等的粘接,因此用量比混凝土要少得多。预拌砂浆指在专业工厂进行配料和混合而生产的商品化砂浆,预拌砂浆是区别于现场搅拌砂浆而言的。由于砂浆的现场配制有诸多问题,加上劳动力成本的提升,预拌砂浆应运而生,早在20世纪五十年代初就开始在欧洲国家大量生产和使用。根据国家标准(gb/t 25181
‑
2010)《预拌砂浆》,预拌砂浆是指专业生产厂家生产的湿拌砂浆或干混砂浆。湿拌砂浆是水泥、细骨料、矿物掺合料、外加剂、添加剂和水按照一定比例在搅拌站经计量、拌制后运至使用地点,并在规定时间内使用的拌合物。干混砂浆是水泥、干燥骨料或粉料、添加剂以及根据性能确定的其他组分,按一定比例,在专业生产厂经计量、混合而成的混合物,在使用地点按规定比例加水或配套组分拌和使用。所以,预拌砂浆都是在专业生产厂家进行生产,专业砂浆厂包括搅拌站和干混砂浆厂。然而,专业砂浆厂需要设备投资大、费用和运营成本高,微型移动式的砂浆站是一种全新概念,可极大促进预拌砂浆的推广和应用。但是现有的结构及配料方式使得费用和运营成本高,同时混合配料的稳定性差,从而影响产品质量效果。
技术实现要素:
3.本发明的目的一为提供一种移动式微型砂浆站配料方法,能够有效提高降低成本,提高产品质量和工作稳定性。
4.本发明的目的二为提供上述方法的移动式微型砂浆站配料系统。
5.为实现目的一,本发明提供了移动式微型砂浆站配料方法,包括以下处理步骤;
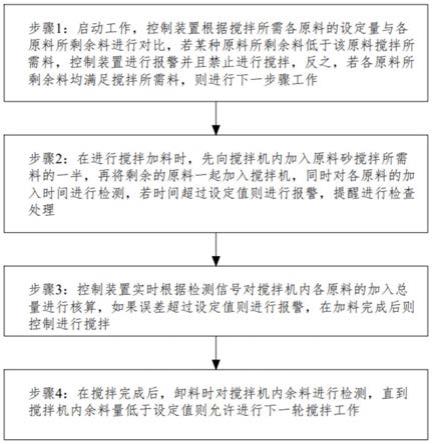
6.步骤1:启动工作,控制装置根据搅拌所需各原料的设定量与各原料所剩余料进行对比,若某种原料所剩余料低于该原料搅拌所需料,控制装置进行报警并且禁止进行搅拌,反之,若各原料所剩余料均满足搅拌所需料,则进行下一步骤工作;
7.步骤2:在进行搅拌加料时,先向搅拌机内加入原料砂搅拌所需料的一半,再将剩余的原料一起加入搅拌机,同时对各原料的加入时间进行检测,若时间超过设定值则进行报警,提醒进行检查处理;
8.步骤3:控制装置实时根据检测信号对搅拌机内各原料的加入总量进行核算,如果误差超过设定值则进行报警,在加料完成后则控制进行搅拌;
9.步骤4:在搅拌完成后,卸料时对搅拌机内余料进行检测,直到搅拌机内余料量低于设定值则允许进行下一轮搅拌工作。
10.优选地,在步骤3中,对搅拌机内各原料的加入总量进行核算时,控制装置通过接
收各原料的原料罐上分别采集的减量数值进行相加与接收来自搅拌机上采集的增量数值进行比较,若差值超过各原料罐的减量数值相加值的1.5%或搅拌机增量数值的1.5%,控制装置则进行报警提醒并且记录偏差值。
11.优选地,所述搅拌机通过在各支撑腿上安装贴片式传感器进行信号采集,贴片式传感器的信号通过惠斯通电桥输送到控制装置,贴片式传感器发送的信号中重量增量计算公式为,m0=k1v k0;其中,m0为重量增量,k1为重量计算关系系数,k0为初始电压对应值,v为采集的电压信号。
12.优选地,在对重量增量进行计算时,还对采集的电压信号进行修正,其中,修正系数计算公式为,i=k2w1/w0 k2(w1/w0)2 k3(w1/w0)3;其中,w0为搅拌机的空载输送功率,w1为搅拌机的实时输出功率,i为电压信号修正系数,k2和k3均为电压信号修正计算关系系数,从而,修正后的重量增量计算公式为,m0=k1iv k0,其中,m0为重量增量,k1为重量计算关系系数,k0为初始电压对应值,v为采集的电压信号。
13.优选地,在步骤4中卸料时通过实时检测搅拌机的电机实时电流与搅拌机的空载电流进行对比来对搅拌机内余料进行检测,若实时检测搅拌机的电机实时电流与搅拌机的空载电流间偏差在搅拌机的空载电流的5%以内,则判定搅拌机内余料量低于设定值则允许进行下一轮搅拌工作。
14.优选地,在搅拌机中工作人员只允许控制加入水,控制装置上设置水量调节旋钮,调整范围为设定值的
±
25%。
15.为实现目的二,本发明提供一种移动式微型砂浆站配料系统,包括搅拌机、用于沙储存及放料控制的沙罐结构、用于原料粉储存及放料控制的粉罐结构、用于水储存及放料控制的水罐结构和用于外加剂储存及放料控制的外加剂罐结构,所述搅拌机分别通过连接管与沙罐结构、粉罐结构、水罐结构和外加剂罐结构连接,所述搅拌机的各支撑腿上分别安装有贴片式传感器,所述沙罐结构设置有用于对沙罐结构内沙重量变化进行检测的第一称重传感器,所述粉罐结构设置有用于对粉罐结构内原料粉重量变化进行检测的第二称重传感器,所述水罐结构设置有用于对水罐结构放出水量进行监测的水计量泵,所述外加剂罐结构设置有用于对外加剂罐结构放出外加剂量进行监测的外加剂计量泵,所述搅拌机、第一称重传感器、沙罐结构、第一称重传感器、粉罐结构、第二称重传感器、水罐结构、水计量泵、外加剂罐结构和外加剂计量泵分别与一控制装置信号连接。
16.优选地,所述沙罐结构还包括沙罐、设置于沙罐下端的第一旋转输送机和设置于沙罐下部侧壁上用于放料辅助的第一振动电机,所述第一称重传感器设置于沙罐的支撑腿上,所述第一旋转输送机和第一振动电机分别与控制装置信号连接;所述粉罐结构还包括粉罐、设置于粉罐下端的第二旋转输送机和设置于粉罐下部侧壁上用于放料辅助的第二振动电机,所述第二称重传感器设置于粉罐的支撑腿上,所述第二旋转输送机和第二振动电机分别与控制装置信号连接。
17.优选地,所述水罐结构包括水罐、设置于水罐的进水管上的水位控制阀、设置于水罐内用于对液压进行检测从而测量液位高度的第一液压传感器、设置于水罐侧壁上部用于对液位上限进行检测的上料位计和设置于水罐侧壁上上料位计下方用于液位下限进行检测的下料位计,所述水罐与搅拌机的连接管上依次设置用于出料控制的水配料阀和水计量泵,所述水罐的侧壁上还通过水管设置有用于循环驱动的循环水泵,所述水罐的侧壁与水
管的两端连接,所述第一液压传感器、上料位计、下料位计、循环水泵和水配料阀分别与控制装置信号连接。
18.优选地,所述外加剂罐结构包括外加剂罐和设置于外加剂罐内部用于对液压进行检测从而测量液位高度的第二液压传感器,所述外加剂计量泵设置于外加剂罐上端外加剂罐与搅拌机的连接管上,所述第二液压传感器与控制装置信号连接。
19.本发明与现有技术相比,其有益效果在于:
20.在本发明中通过控制装置控制搅拌机、沙罐结构、粉罐结构、水罐结构和外加剂罐结构协调进行工作,能够有效提高降低成本,提高产品质量和工作稳定性。在本发明中控制装置通过对接收来自搅拌机上贴片式传感器采集的电压信号进行修正,能够有效提供检测精度,保证配比的精度,从而产品质量。在本发明的沙罐结构和粉罐结构分别设置振动电机能够有效提高卸料速度避免堵塞,提高工作效率和工作稳定性。在本发明中卸料时通过实时检测搅拌机的电机实时电流与搅拌机的空载电流进行对比来对搅拌机内余料进行检测能够有效提高检测精度,保证卸料完整,提高工作效率。在本发明中通过搅拌机中工作人员只允许控制加入水,并且控制装置上设置水量调节旋钮,能够便于调整砂浆的稠度,提高产品质量。
附图说明
21.图1为本发明中配料方法的流程框图;
22.图2是本发明的结构示意图。
具体实施方式
23.下面结合附图进一步详细描述本发明的技术方案,但本发明的保护范围不局限于以下。
24.如图1
‑
2所示,本发明提供了一种移动式微型砂浆站配料方法,包括以下处理步骤;
25.步骤1:启动工作,控制装置根据搅拌所需各原料的设定量与各原料所剩余料进行对比,若某种原料所剩余料低于该原料搅拌所需料,控制装置进行报警并且禁止进行搅拌,反之,若各原料所剩余料均满足搅拌所需料,则进行下一步骤工作;
26.步骤2:在进行搅拌加料时,先向搅拌机1内加入原料砂搅拌所需料的一半,再将剩余的原料一起加入搅拌机1,同时对各原料的加入时间进行检测,若时间超过设定值则进行报警,提醒进行检查处理;
27.步骤3:控制装置实时根据检测信号对搅拌机1内各原料的加入总量进行核算,如果误差超过设定值则进行报警,在加料完成后则控制进行搅拌;
28.步骤4:在搅拌完成后,卸料时对搅拌机1内余料进行检测,直到搅拌机1内余料量低于设定值则允许进行下一轮搅拌工作。
29.在本实施例中,搅拌工作完成后,通过控制装置打开水清洗阀49清洗搅拌机。在进行卸料时,根据需要由工作人员手动控制搅拌机1的卸料量。控制装置为plc并且设置有显示器和控制面板。
30.在步骤3中,对搅拌机1内各原料的加入总量进行核算时,控制装置通过接收各原
料的原料罐上分别采集的减量数值进行相加与接收来自搅拌机1上采集的增量数值进行比较,若差值超过各原料罐的减量数值相加值的1.5%或搅拌机1增量数值的1.5%,控制装置则进行报警提醒并且记录偏差值。此外,差值还可以设置为超过各原料罐的减量数值相加值的1%或搅拌机1增量数值的1%以提高检测精度。
31.搅拌机1通过在各支撑腿上安装贴片式传感器12进行信号采集,贴片式传感器12的信号通过惠斯通电桥输送到控制装置,贴片式传感器12发送的信号中重量增量计算公式为,m0=k1v k0;其中,m0为重量增量,k1为重量计算关系系数,k0为初始电压对应值,v为采集的电压信号。
32.在对重量增量进行计算时,还对采集的电压信号进行修正,其中,修正系数计算公式为,i=k2w1/w0 k2(w1/w0)2 k3(w1/w0)3;其中,w0为搅拌机1的空载输送功率,w1为搅拌机1的实时输出功率,i为电压信号修正系数,k2和k3均为电压信号修正计算关系系数,从而,修正后的重量增量计算公式为,m0=k1i v k0,其中,m0为重量增量,k1为重量计算关系系数,k0为初始电压对应值,v为采集的电压信号。
33.在步骤4中卸料时通过实时检测搅拌机1的电机实时电流与搅拌机1的空载电流进行对比来对搅拌机1内余料进行检测,若实时检测搅拌机1的电机实时电流与搅拌机1的空载电流间偏差在搅拌机1的空载电流的5%以内,则判定搅拌机1内余料量低于设定值则允许进行下一轮搅拌工作。
34.在搅拌机1中工作人员只允许控制加入水,控制装置上设置水量调节旋钮,调整范围为设定值的
±
25%。调节旋钮通过可变电阻来控制信号输出实现改变在配合比外的自动增加水的功能。
35.本发明还提供了一种移动式微型砂浆站配料系统,包括搅拌机1、用于沙储存及放料控制的沙罐结构2、用于原料粉储存及放料控制的粉罐结构3、用于水储存及放料控制的水罐结构4和用于外加剂储存及放料控制的外加剂罐结构5,搅拌机1分别通过连接管与沙罐结构2、粉罐结构3、水罐结构4和外加剂罐结构5连接,搅拌机1的各支撑腿上分别安装有贴片式传感器12,沙罐结构2设置有用于对沙罐结构2内沙重量变化进行检测的第一称重传感器22,粉罐结构3设置有用于对粉罐结构3内原料粉重量变化进行检测的第二称重传感器32,水罐结构4设置有用于对水罐结构4放出水量进行监测的水计量泵46,外加剂罐结构5设置有用于对外加剂罐结构5放出外加剂量进行监测的外加剂计量泵53,搅拌机1、第一称重传感器22、沙罐结构2、第一称重传感器22、粉罐结构3、第二称重传感器32、水罐结构4、水计量泵46、外加剂罐结构5和外加剂计量泵53分别与一控制装置信号连接。在本实施例中,第一称重传感器22和第二称重传感器32也可以为贴片式传感器。水计量泵46和外加剂计量泵53用于测量流经的液体量并且实时发送信号到控制装置。
36.沙罐结构2还包括沙罐21、设置于沙罐21下端的第一旋转输送机24和设置于沙罐21下部侧壁上用于放料辅助的第一振动电机23,第一称重传感器22设置于沙罐21的支撑腿上,第一旋转输送机24和第一振动电机23分别与控制装置信号连接;粉罐结构3还包括粉罐31、设置于粉罐31下端的第二旋转输送机34和设置于粉罐31下部侧壁上用于放料辅助的第二振动电机33,第二称重传感器32设置于粉罐31的支撑腿上,第二旋转输送机34和第二振动电机33分别与控制装置信号连接。第一旋转输送机24和第二旋转输送机34输出端通过连接管与搅拌罐11连接。
37.水罐结构4包括水罐41、设置于水罐41的进水管上的水位控制阀48、设置于水罐41内用于对液压进行检测从而测量液位高度的第一液压传感器42、设置于水罐41侧壁上部用于对液位上限进行检测的上料位计43和设置于水罐41侧壁上上料位计43下方用于液位下限进行检测的下料位计44,水罐41与搅拌机1的连接管上依次设置用于出料控制的水配料阀45和水计量泵46,水罐41的侧壁上还通过水管设置有用于循环驱动的循环水泵47,水罐41的侧壁与水管的两端连接。搅拌机1的清洗进水端通过水管与外部进水管连接并且该水管上设置有水清洗阀49,第一液压传感器42、上料位计43、下料位计44、循环水泵47、水清洗阀49和水配料阀45分别与控制装置信号连接。
38.外加剂罐结构5包括外加剂罐51和设置于外加剂罐51内部用于对液压进行检测从而测量液位高度的第二液压传感器52,外加剂计量泵53设置于外加剂罐51上端外加剂罐51与搅拌机1的连接管上,第二液压传感器52与控制装置信号连接。
39.在本实施例中,搅拌机1包括分别与沙罐结构2、粉罐结构3、水罐结构4和外加剂罐结构5连接的搅拌罐11和设置于搅拌罐11一端用于搅拌驱动的搅拌驱动电机13,搅拌驱动电机13与控制装置信号连接。
40.在本实施例中,工作时,工作人员通过控制装置启动并且根据需要设定各原料的量,控制装置实时接收来自沙罐结构2、粉罐结构3、水罐结构4和外加剂罐结构5的信号获取沙、原料粉、水及外加剂的剩余量。控制装置根据搅拌所需各原料的设定量与各原料所剩余料进行对比,若某种原料所剩余料低于该原料搅拌所需料,控制装置进行报警并且禁止进行搅拌,反之,若各原料所剩余料均满足搅拌所需料,则进行下一步骤工作;在进行搅拌加料时,控制装置控制沙罐结构2先向搅拌机1内加入原料砂搅拌所需料的一半,再将其他结构一同进行配料,同时对各原料的加入时间进行检测,若时间超过设定值则进行报警,提醒进行检查处理;控制装置实时根据检测信号对沙罐结构2、粉罐结构3、水罐结构4和外加剂罐结构5的减量之和与搅拌机1内各原料的加入总量的增量进行核算,如果误差超过设定值则进行报警,由工作人员进行查看处理;在加料完成后则控制进行搅拌;在搅拌完成后,卸料时对搅拌机1内余料进行检测,直到搅拌机1内余料量低于设定值则允许进行下一轮搅拌工作。
41.以上仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

