1.本发明涉及空间观测技术领域,特别涉及一种在轨伽马射线暴观测方法。
背景技术:
2.伽玛射线暴(gamma ray burst,缩写grb),又称伽玛暴,是来自天空中某一方向的伽玛射线强度在短时间内突然增强,随后又迅速减弱的现象,持续时间在0.1
‑
1000秒,辐射主要集中在0.1
‑
100mev的能段。伽玛暴发现于1967年,数十年来,人们对其本质了解得还不很清楚,但基本可以确定是发生在宇宙学尺度上的恒星级天体中的爆发过程。伽玛暴是目前天文学中最活跃的研究领域之一,曾在1997年和1999年两度被美国《科学》杂志评为年度十大科技进展之列。
3.伽马射线暴是目前已知宇宙中最强的爆射现象,理论上是巨大恒星在燃料耗尽时塌缩爆炸或者两颗邻近的致密星体(黑洞或中子星)合并而产生的。伽马射线暴短至千分之一秒,长则数小时,会在短时间内释放出巨大能量。如果与太阳相比,它在几分钟内释放的能量相当于万亿年太阳光的总和,其发射的单个光子能量通常是典型太阳光的几十万倍。
4.伽马射线暴的能源机制至今依然远未解决,这也是伽马射线暴研究的核心问题。随着技术的进步,人类对宇宙的认识也将更加深入,很多现在看来还是个谜的问题也许未来就会被解决,探索宇宙的奥秘不但是人类追求科学进步的必要,这些谜团的解开也终将会使人类自身受益。但如何发现、定位、测量各种伽马射线暴,以研究宇宙的演化和暗能量,是现阶段天文学领域的难题。
技术实现要素:
5.本发明的目的在于提供一种在轨伽马射线暴观测方法,以解决现有的伽马射线暴观测难度较大的问题。
6.为解决上述技术问题,本发明提供一种在轨伽马射线暴观测方法,包括:
7.采用天文观测卫星的星上自主触发任务系统进行伽玛射线暴观测;
8.将伽玛射线暴观测设置为天文观测卫星的主任务,由星上自主触发任务系统触发完成伽玛射线暴观测,星上自主触发任务系统进行以下任务:
9.通过宽视场载荷探测到伽玛射线暴后,天文观测卫星获取该伽玛射线暴的位置参数、能谱参数及光变参数,通过vhf波段实时向地面站提供位置参数、能谱参数及光变参数;
10.天文观测卫星根据由宽视场载荷定位的伽玛射线暴的触发信息,自主快速姿态机动,对伽玛射线暴进行光学余辉的持续观测;
11.在观测中,天文观测卫星保持高姿态稳定度,确保光学望远镜的探测性能。
12.可选的,在所述的在轨伽马射线暴观测方法中,天文观测卫星按照星上自主触发任务系统设置的伽玛射线暴观测时长进行观测。
13.可选的,在所述的在轨伽马射线暴观测方法中,天文观测卫星任务期间预计探测并定位多种伽马射线暴,包括:短暴、长暴及富含x射线的伽马射线暴,其中:
14.所述短暴的持续时间为1毫秒~2秒;
15.所述长暴的持续时间为2秒~1000秒;
16.所述富含x射线的伽马射线暴的辐射能段为30kev以下。
17.可选的,在所述的在轨伽马射线暴观测方法中,在观测中,天文观测卫星保持高姿态稳定度,确保光学望远镜的探测性能包括:
18.天文观测卫星保持0.8”/100s的稳定度,所述光学望远镜的探测性能为22.5mv。
19.可选的,在所述的在轨伽马射线暴观测方法中,所述伽马射线暴的观测流程包括:
20.天文观测卫星中宽视场载荷发现伽马射线暴后,经确认后发送给载荷数据处理计算机。
21.可选的,在所述的在轨伽马射线暴观测方法中,还包括:
22.伽马射线暴随机出现在宽视场载荷视场内的任何位置,卫星机动之后的指向为伽马射线暴指向;
23.宽视场载荷对伽马射线暴的定位信息由载荷数据处理计算机转发,由vhf下传至地面站;
24.载荷数据处理计算机根据伽马射线暴指向约束条件,计算伽马射线暴指向与太阳的夹角、以及伽马射线暴指向与月亮的夹角,判断两个夹角是否大于载荷数据处理计算机的判断条件;
25.若天文观测卫星符合太阳约束及月亮约束,则载荷数据处理计算机将目标指向转换成姿态四元数发送给星载计算机;
26.星载计算机判断是否符合任务模式约束条件;
27.任务模式约束条件包括高于现在在轨观测模式的优先级、太阳约束、月亮约束、能源约束、帆板转动策略。
28.可选的,在所述的在轨伽马射线暴观测方法中,还包括:
29.所有约束条件通过后,天文观测卫星在开始机动,并同步广播当前任务id;
30.天文观测卫星姿态稳定度达到要求后,窄视场载荷对伽马射线暴进行高精度观测并定位,产生高精度定位包,经载荷数据处理计算机转发并通过vhf下传至地面站;
31.载荷数据处理计算机根据高精度定位包,发送给星载计算机机动优化请求,按照任务模式约束条件进行判断,若符合任务模式约束条件,天文观测卫星开始二次机动。
32.可选的,在所述的在轨伽马射线暴观测方法中,还包括:
33.在开始机动时刻t1经过15~30分钟后,按照帆板转动策略转动帆板;
34.当前伽马射线暴观测任务进行97分钟后,星载计算机接收新的伽马射线暴触发,当前伽马射线暴观测任务被拒绝并抛弃;
35.当前伽马射线暴观测任务不被打断的情况下,将持续观测固定轨次,然后天文观测卫星回到常规观测或机遇目标观测。
36.在本发明提供的在轨伽马射线暴观测方法中,通过采用天文观测卫星的星上自主触发任务系统进行伽玛射线暴观测,宽视场载荷探测到伽玛射线暴后,天文观测卫星被触发,获取该伽玛射线暴的各参数,实时向地面站提供各参数,实现了伽马射线暴的自动快速捕获,另外通过天文观测卫星根据由宽视场载荷定位的伽玛射线暴的触发信息,自主快速姿态机动,对伽玛射线暴进行光学余辉的持续观测,在观测中,天文观测卫星保持高姿态稳
定度,确保光学望远镜的探测性能,实现了提高伽马射线暴观测的持续性、精确性和可靠性。天文观测卫星具有星上自主发现目标,卫星快速机动,星上自主管理等特点,是目前星上自主能力要求最高、任务模式最复杂的卫星之一。除星上自主观测任务,还有多种地面规划任务,星上需实现地面规划任务与在轨自主触发任务协同管理。
附图说明
37.图1(a)是本发明一实施例对gw170814进行too
‑
mm观测的观测目标示意图;
38.图1(b)是本发明一实施例对gw170814进行too
‑
mm观测实现示意图;
39.图2是本发明一实施例反太阳指向示意图;
40.图3是本发明一实施例b1指向下太阳与卫星的相对关系示意图;
41.图4是本发明一实施例b1指向下宽视场载荷视场轨迹示意图;
42.图5是本发明一实施例太阳与
‑
xs轴夹角变化示意图;
43.图6是本发明一实施例grb观测指向示意图;
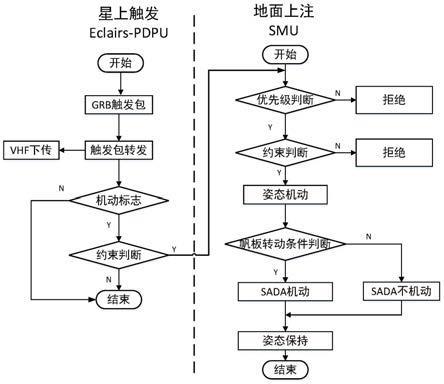
44.图7是本发明一实施例星上任务管理流程示意图;
45.图8是本发明一实施例星上任务切换流程示意图。
具体实施方式
46.以下结合附图和具体实施例对本发明提出的在轨伽马射线暴观测方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
47.另外,除非另行说明,本发明的不同实施例中的特征可以相互组合。例如,可以用第二实施例中的某特征替换第一实施例中相对应或功能相同或相似的特征,所得到的实施例同样落入本技术的公开范围或记载范围。
48.本发明的核心思想在于提供一种在轨伽马射线暴观测方法,以解决现有的伽马射线暴观测难度较大的问题。
49.为实现上述思想,本发明提供了一种在轨伽马射线暴观测方法,包括:采用天文观测卫星的星上自主触发任务系统进行伽玛射线暴观测;将伽玛射线暴观测设置为天文观测卫星的主任务,由星上自主触发任务系统触发,完成伽玛射线暴观测,星上自主触发任务系统进行以下任务:通过宽视场载荷探测到伽玛射线暴后,天文观测卫星获取该伽玛射线暴的位置参数、能谱参数及光变参数,通过vhf波段实时向地面站提供位置参数、能谱参数及光变参数;天文观测卫星根据由宽视场载荷定位的伽玛射线暴的触发信息,自主快速姿态机动,对伽玛射线暴进行光学余辉的持续观测;在观测中,天文观测卫星保持高姿态稳定度,确保光学望远镜的探测性能。
50.本发明采用天文观测卫星发现、定位,测量各种伽马射线暴(gamma
‑
ray burst,grb)和其他高能瞬变现象(包括x射线爆、软γ重复暴、活动星系核agn及新星等),研究宇宙的演化和暗能量。该卫星具有星上自主发现目标,卫星快速机动,星上自主管理等特点,是目前星上自主能力要求最高、任务模式最复杂的卫星之一。除星上自主观测任务,还有多种地面规划任务,星上需实现地面规划任务与在轨自主触发任务协同管理。
51.本发明根据系统需求,设计了多个在轨观测模式,所述在轨观测模式包括伽马暴观测(grb)、再现源观测(catalog transient event,cat)、常规观测(general program,gp)和机会目标(target of opportunity,too)观测四大类,其中too观测又包括常规机遇目标(nominal target of opportunity,too
‑
nom)观测、重要机遇目标(exceptional target of opportunity,too
‑
ex)观测、以及多信使机遇目标(multi
–
messenger target of opportunity,too
‑
mm)观测。
52.由于星上自主观测时机、目标指向等的不确定性,地面站无法预知卫星的当前的在轨观测模式、姿态指向、以及能源等情况。且为保证载荷及卫星安全,保证科学数据的有效性,执行新的观测任务前,还需对太阳约束、月亮约束、能源约束等多项约束条件进行计算判断。所以,在轨观测模式及自主管理是卫星观测任务成败的关键。
53.天文观测卫星在轨观测模式包括grb、cat、gp和too观测四类观测任务,其中,gp观测是预先计划的对已知源或天区的观测,too任务是对新发现源或已知暂现源/变源的机遇观测。grb和cat是星上自主触发任务用于伽玛暴观测。
54.窄视场载荷包括软x射线望远镜mxt及光学望远镜vt,宽视场载荷包括硬x射线相机eclairs及伽玛射线监视器grm。
55.在本发明的一个实施例中,提出了grb观测需求,grb观测是天文观测卫星的主任务,可由星上和地面配合观测或星上单独触发,完成grb观测,星上主要工作包括:卫星通过宽视场载荷探测到伽玛暴的触发,对探测到的伽玛暴获得其位置、能谱、光变等参数,通过vhf波段近实时向地面提供;卫星根据由宽视场载荷定位的伽玛暴触发信息,自主快速姿态机动,对伽玛暴进行光学余辉的持续观测;卫星保持高姿态稳定度(0.8”/100s),确保光学望远镜的探测性能(22.5mv);卫星能按星上设置的grb观测时长观测,默认连续观测14轨。天文观测卫星任务期间预计探测并定位至少200个各种类型的伽玛暴,包括:短暴(持续时间几毫秒到1
‑
2秒),长暴(持续时间可长达1,000秒),特别富含x射线的伽玛暴(例如,辐射主要在能段30kev以下的伽玛暴)。
56.在本发明的一个实施例中,提出了cat观测需求,cat观测与grb观测非常相似,主要区别是cat观测宽视场载荷内部存储了已知的伽马暴信息列表,一旦发现的伽马暴目标源并定位成功,宽视场载荷即与存储的列表比对,如果探测的目标是存储的目标一致,此次观测为cat观测,否则为grb观测。星上其余处理流程与grb观测一致。伽马暴信息列表的内容(观测源和相应的阈值)在任务期间不断更新。
57.在本发明的一个实施例中,提出了gp观测需求,gp观测是地面规划任务,等待grb触发。gp观测规划的指向有利于发现伽马暴,观测无缝覆盖整个观测时段。grb或too观测能打断gp观测。grb或too观测结束后,将机动返回并执行gp观测任务中原本应在当前时刻执行的观测。载荷仪器的标定测试也是gp观测的一种。卫星常规运行期间(考核寿命3年内),gp任务占全部整个观测有效时间至少60%。卫星拓展运行期间(寿命3年以外),gp任务减至35%。
58.在本发明的一个实施例中,提出了too观测需求,too观测是在卫星的运行过程中,宇宙中突然发生的值得观测的天文事件,它可以由其它卫星发现,经过科学家分析,由地面站规划,上注到卫星执行的观测任务。too观测分为常规机遇目标(too
‑
nom)任务观测、重要机遇目标(too
‑
ex)任务观测和多信使机遇目标(too
‑
mm)任务观测三个小类。
59.其中too
‑
nom观测比较重要的天文突发事件,可以被grb观测打断。too
‑
nom观测也支持载荷仪器的标定测试。其次,too
‑
ex观测对象是非常重要的天文事件或目标,有非常强的观测价值,观测期间,卫星不响应星上探测到的grb。此类机遇目标的预期频度为每月1个。最后too
‑
mm观测对象也是非常重要的天文事件或目标,但目标较大,无法通过一次观测全面覆盖,所以设计这种多指向、拼接式的观测模式,将目标分割成多片(tiles),按照优先级、机动角度等合理规划路径,实现对目标的观测。
60.图1(a)示出了观测目标,图1(b)示出了按照too
‑
mm观测要求将观测目标划分成多个tiles,按照系统给出的目标规划算法,考虑优先级及视场等因素,每轨在10
°×
10
°
范围内选出5个左右tiles,每个tile实现10分钟左右的有效观测时间。拓展试验期间too
‑
mm观测可对10
°×
10
°
不再约束。
61.本发明还提供了多个在轨观测模式的观测指向,天文观测卫星观测期间,主要包括gp指向、too指向及grb/cat指向,这几种指向都必须满足反太阳指向要求,如图2所示,主要包括:太阳与 xs轴的夹角大于90
°
,保证 x面不受太阳的照射;太阳与 y面,或
‑
y面的夹角小于5
°
;太阳与
‑
zs轴的夹角大于90
°
,保证
‑
z面不受太阳的照射。
62.在本发明的一个实施例中,提出了gp指向,gp观测指向通常情况下,位于针对伽玛暴探测优化的卫星参考指向(即“b1指向”)的
±
10
°
范围内,同时窄视场仪器的视场不被地球遮挡。b1指向采用优化后的反太阳指向方案,如图3所示,反太阳指向能够确保探测到的伽玛暴位于地球阴影一侧,使地面望远镜在黑夜观测,在反太阳的基础上,还需要具体考虑以下因素:避开scox
‑
1,银河带等对grb探测有影响的特殊天区;保证所观测的天区有利于地面大望远镜的观测;为载荷提供良好的热环境,使其在姿态机动前后都不受太阳影响。根据地面大望远镜的分布,卫星指向应尽量靠近天赤道,若指向的赤纬在[
‑
21
°
, 25
°
]之间,三台大望远镜都有机会观测探测到的伽玛暴。b1指向下宽视场载荷视场边缘轨迹如图4所示。从图4可以看出,在运行观测期间,宽视场载荷视场很好地躲避了银河带与scox1亮天体。由于要满足太阳与卫星的相对关系,卫星需要绕xs轴旋转,从图上可以看出所引起的视场边缘的旋转。太阳与 z面保持45
°
夹角,在某些特殊情况下,由于要躲避scox1与银河,该角度可以到62
°
,如图5所示。为引入gp观测规划灵活性,也定义了超出参考指向
±
10
°
的比例随着观测时间不断增加,在项常规运行期间超出比例约10%,拓展期间逐渐增加到50%。
[0063]
在本发明的一个实施例中,提出了too指向,too观测不需要遵循参考指向,仅需保证反太阳指向。
[0064]
在本发明的一个实施例中,提出了grb指向/cat指向,grb事件随机出现在宽视场载荷视场内的任何位置,grb观测时机动的角度最大为 /
‑
45
°
。机动之后的这个指向称之为grb指向,如图6所示。
[0065]
本发明还提供了一种在轨观测模式的管理方法,具体包括观测模式总体设计,根据观测需求,卫星星上观测实现由smu(satellite management unit,星载计算机)和pdpu(payload data processing unit,载荷数据处理计算机)联合完成,具体流程如图7所示。从图7可知,星上观测任务由smu和pdpu共同管理,pdpu主要管理星上触发的任务,smu对地面规划和星上自主触发观测任务全面管理。
[0066]
在本发明的一个实施例中,提出了观测模式切换管理,图8给出了各种观测模式切换示意图。地面规划任务的管理流程如下:地面站发送gp、too平台任务列表存储于smu中;
地面站发送的gp、too任务对应的载荷配置表存储在pdpu中;任务开始时间时,smu按照任务模式约束条件进行约束判断;如果所有约束通过,卫星机动,指向目标;并同步广播当前任务id;pdpu根据任务id,根据载荷配置表中设置,配置载荷工作参数;根据帆板转动策略转动帆板。保持当前指向,等待下一次任务。
[0067]
在本发明的一个实施例中,提出了星上自主触发管理流程如下:pdpu实时接收宽视场载荷触发包,并通过vhf通道转发给地面站;pdpu判断宽视场载荷触发包中的机动请求标志,当机动请求有效,pdpu根据宽视场载荷触发包中的位置信息,计算目标指向与太阳及月亮的夹角(太阳约束和月亮约束),判断目标是否适合卫星观测。当太阳约束、月亮约束均通过,pdpu将目标指向转换成姿态四元数发送给smu。后续smu的处理流程包括:任务开始时间时,smu按照任务模式约束条件判断;如果所有约束通过,卫星机动,指向目标;并同步广播当前任务id;pdpu根据当前任务id,根据载荷配置表中设置,配置载荷工作参数;根据帆板转动策略转动帆板。保持当前指向,等待下一次任务。其中,任务模式约束条件包括高于现在在轨观测模式的优先级、太阳约束、月亮约束、能源约束、帆板转动策略。
[0068]
本发明还提供了一种观测的约束设计及管理方法,包括姿态机动约束,在响应任务时,天文观测卫星需机动并指向目标,在此过程中,不响应其他任务中断请求。还包括优先级管理,按照系统需求和定义,天文观测卫星各种任务(在轨观测模式)的优先级从低到高:gp任务<too
‑
nom任务<grb/cat任务<too
‑
ex任务/too
‑
mm任务;可以看出,任务优先级最低的是gp任务,grb和cat任务是同一个优先级,too
‑
ex任务和too
‑
mm任务同一优先级,优先级最高,可以中断grb和cat任务。新上注的too
‑
ex任务和too
‑
mm任务可以打断原有的too
‑
ex任务和too
‑
mm任务。
[0069]
具体的,天文观测卫星对所有任务均会进行两次太阳约束、月亮约束检查。对于gp和too任务,地面预先加严检查,确认包括太阳约束、月亮约束通过再上注。对于grb和cat任务两种星上自主触发任务,采用pdpu先加严检查并确认太阳约束、月亮约束均通过后再转发至smu。smu对所有任务请求均按要求检查太阳、月亮约束。
[0070]
在本发明的一个实施例中,提出了太阳约束,pdpu判断太阳与卫星夹角需满足:角度1[太阳,卫星 x轴]>91.1
°
;smu判断太阳约束的夹角需满足:角度1[太阳,卫星 x轴]>89.9
°
,角度2[太阳,卫星 y轴]>85
°
,角度3[太阳,卫星
‑
y轴]>85
°
,角度4[太阳,卫星
‑
z轴]>89
°
。以上参数支持地面指令修改参数值。
[0071]
在本发明的一个实施例中,提出了月亮约束,pdpu判断月亮遮挡约束以下三种情况可选:角度1[月亮,卫星 x轴]>22
°
(vt)、角度2[月亮,卫星 x轴]>12
°
(mxt)、无约束。smu判断月亮遮挡约束以下三种情况可选:角度1[月亮,卫星 x轴]>20.4
°
(vt)、角度2[月亮,卫星 x轴]>10.4
°
(mxt)、无约束。以上参数支持地面指令修改参数值。
[0072]
在本发明的一个实施例中,提出了能源约束,为保证能源安全,任务执行前需判断蓄电池放电深度。参数1:当前蓄电池放电深度>20%;参数2:预计最大放电深度>20%;参数支持地面指令修改参数值,支持屏蔽/开启功能。
[0073]
在本发明的一个实施例中,提出了帆板转动策略,不同任务对应的帆板转动时间:执行grb/cat任务时,设计了帆板抑制时间,抑制时间后再转动帆板;帆板抑制时间默认15min,根据指令可调。执行gp、too
‑
nom,too
‑
ex任务,too
‑
mm任务时,姿态满足任务要求后(即进入了常规指向/高精度指向),转动帆板。帆板遵循如下转动策略:条件1:帆板预计转
动角度≤10
°
(默认10
°
,在轨可调),帆板保持不动;条件2:(1)30
°
≥帆板预计转动角度>10
°
(在轨可调)(2)当前蓄电池组放电深度<10%(在轨可调);满足(1)和(2)时,帆板保持不动;条件3:其他情况,转动帆板。
[0074]
本发明还提供了各个在轨观测模式的不同的观测流程设计,包括伽玛暴(grb)/再现源(cat)观测流程、常规(gp)观测流程、机遇目标(too)观测的观测流程设计。
[0075]
具体的,伽玛暴(grb)/再现源(cat)观测流程包括:grb和cat任务均为宽视场载荷对其定位后,卫星自主进行观测,不同的是cat任务探测到的源已收录在宽视场载荷的源目录列表中。天文观测卫星中宽视场载荷和grm均可能发现伽玛暴,均经宽视场载荷确认后发送给pdpu,具体如下:若是grm探测到伽玛暴,产生grm触发包经pdpu转发给宽视场载荷,宽视场载荷确认后生成宽视场载荷触发包;若是宽视场载荷探测到伽玛暴,则直接产生宽视场载荷触发包。grb和cat任务流程如下所示:通过宽视场载荷触发包,宽视场载荷能够收集grb的定位信息(含触发时刻t0,伽玛暴在ecl视场位置),并由pdpu转发,再由vhf下传至地面站;如果grb的位置精度优于13角分,宽视场载荷机动请求标志设置成有效;pdpu根据grb指向这一约束条件,计算目标指向与太阳、月亮的夹角(太阳约束和月亮约束),计算以上夹角是否大于任务模式约束条件中pdpu的判断条件。若太阳约束、月亮约束均通过,则pdpu再将目标指向转换成姿态四元数发送给smu;smu按照“任务模式约束条件”进行判断;任务模式约束条件的所有约束条件通过后,卫星开始机动(t1时刻),5分钟内使窄视场载荷指向grb的位置,并同步广播当前任务id;卫星姿态稳定度达到要求后(80”),窄视场载荷对grb进行高精度观测并定位,产生高精度定位包,经pdpu转发,由vhf下传至地面站;高精度定位包中含当前目标的优化指向及品质因子qf值;当高精度定位包中的qf值≥2时,且当前grb观测不超过2轨的情况下,pdpu将在下一个常规机动点发送grb优化指向请求;smu收到pdpu发送的优化请求,按照“任务模式约束条件”进行判断,任务模式约束条件的所有约束条件通过后,卫星开始二次机动,一次grb/cat任务只进行一次优化指向;pdpu根据当前任务id、高精度定位包中信息及星上预存的grb任务参数,按照vt管理时序,配置vt工作参数,生成vhf及x
‑
band通道数据;grm根据当前任务id及当前任务模式,生成相应的vhf及x
‑
band通道数据;伽玛射线监视器与硬x射线相机开始等待下一个grb的触发;(t1 15)分钟(可调,15分钟~30分钟),按照上述帆板转动策略转动帆板;对当前grb任务观测97分钟(可调)后,smu接受新的grb触发,97分钟内的grb任务被拒绝并抛弃;当前grb任务不被打断的情况下,将持续观测14轨(可调),然后卫星回到gp或too
‑
nom观测。
[0076]
在本发明的一个实施例中,常规(gp)观测流程包括:gp观测任务在无grb发生的情况下,卫星对提前规划上注的科学目标进行常规观测,等待grb触发。gp观测包括常规预先规划观测(gp
‑
ppt)和常规定标观测(gp
‑
cal)任务。gp
‑
ppt任务通常观测位于伽玛暴探测优化的卫星参考指向(即“b1指向”)的
±
10
°
范围内。gp
‑
cal任务用于载荷定标,大概三个月规划一次。地面支撑系统根据gp任务的观测要求规划指向,验证太阳约束、月亮约束等满足后,生成gp任务包,再上注到星上。星上gp观测流程如下:地面上注一周的gp任务,包括gp平台任务包、gsp包和载荷配置表;gp任务全时段覆盖,每周7~98个任务;任务开始时间时,smu按照“任务模式约束条件”进行约束判断;如果所有约束条件通过,卫星机动,指向目标;并同步广播当前任务id;卫星机动结束,按照上述帆板转动策略转动帆板;pdpu根据当前任务id及vt载荷配置表,配置vt工作参数;grm保持当前模式。
[0077]
在本发明的一个实施例中,机遇目标(too)观测流程包括:常规机遇目标(too
‑
nom)观测流程、重要机遇目标(too
‑
ex)观测流程、多信使机遇目标(too
‑
mm)观测。
[0078]
常规机遇目标(too
‑
nom)观测流程包括:too
‑
nom观测能打断gp任务,能被grb/cat任务打断。too
‑
nom观测包括常规机遇grb重访目标(too
‑
nom
‑
grb)、常规机遇补充定标目标(too
‑
nom
‑
acal)和常规机遇天体目标(too
‑
nom
‑
at)任务。星上too
‑
nom观测流程如下:地面上注一天的too
‑
nom任务,包括too
‑
nom平台任务包和载荷配置表;每天1~5个任务;任务开始时间,smu按照“任务模式约束条件”进行约束判断;如果所有约束通过,卫星机动,指向目标;并同步广播当前任务id;卫星机动结束,按照帆板转动策略转动帆板;pdpu根据当前任务id及vt载荷配置表,配置vt工作参数;grm保持当前模式。
[0079]
重要机遇目标(too
‑
ex)观测是优先级最高的任务,可以配置成立即执行和延时执行。too
‑
ex观测的频度预期为每月1个。星上too
‑
ex观测流程如下:地面上注1个的too
‑
ex任务,包括too
‑
ex平台任务包和载荷配置表;根据平台任务包中的时间参数,smu立即或按设置时间点,按照“任务模式约束条件”进行约束判断;如果所有约束通过,卫星机动,指向目标;并同步广播当前任务id;卫星机动结束,按照帆板转动策略转动帆板;pdpu根据任务id及vt载荷配置表,配置vt工作参数;grm保持当前模式。新上注的too
‑
ex或too
‑
mm任务可中断当前的too
‑
ex任务。
[0080]
多信使机遇目标(too
‑
mm)观测是一种拼接式的观测,任务包中含多个tiles,即多个指向,单轨内不超过5个tiles,每个tile的观测时间约为10分钟。一轨内的tiles的机动角度不超过10
°
。too
‑
mm观测任务持续时间不超过14轨,所以一个too
‑
mm任务中tiles数不超过75个。too
‑
mm观测的频度预期为每周1个。星上too
‑
mm观测流程如下:地面上注一个too
‑
mm任务,包括too
‑
mm平台任务包和载荷配置表;tile开始时间,按照“任务模式约束条件”进行约束判断;当前tile约束未通过,保持当前任务;下一个tile开始时继续按照“任务模式约束条件”进行约束判断;如果所有约束通过,卫星机动,指向目标;并同步广播当前任务id;卫星机动结束,按照帆板转动策略转动帆板;pdpu根据任务id及vt载荷配置表,配置vt工作参数,生成too
‑
mm的vhf数据包;grm保持当前模式。转入tile开始时间后的步骤继续进行,直至所有tiles执行结束。
[0081]
本发明还提供了一种观测任务约束冲突判断策略,天文观测卫星星上有自主规划任务,地面无法预知当前卫星状态,天文观测规划了当卫星处于机动过程中,能源情况、太阳、月亮条件不适合开展观测时,不同观测任务的处理措施,具体如表1所示。
[0082]
表1约束不通过任务处理表
[0083]
[0084][0085]
说明:策略1:针对gp、too
‑
nom和too
‑
ex观测任务,当任务由于机动中、能源条件不满足被拒绝时,只有在下一个gsp时间点才有机会被执行;策略2:针对too
‑
mm观测任务,当前tile被拒绝时,下一个tile才有机会被执行。表2给出了每种任务冲突时的处理措施。
[0086]
表2任务冲突判断表
[0087][0088]
表3给出了不同任务模式的优先级、开始时间、结束时间、持续时间等信息。
[0089]
表3任务管理规划
[0090]
[0091][0092]
说明:优先级值越小,优先级越高。
[0093]
本发明针对天文观测卫星观测模式复杂多样性,深入分析了不同任务的重要性,结合目标特性和各种约束条件,设计了gp观测,too观测,grb观测、cat等多个观测模式管理流程,并对任务冲突制定了判断策略,实现了地面规划与在轨自主触发任务交织协同管理,具有很强的灵活性。天文观测卫星观测模式对在轨自主管理具有很大的参考意义。
[0094]
综上,上述实施例对在轨伽马射线暴观测方法的不同构型进行了详细说明,当然,本发明包括但不局限于上述实施中所列举的构型,任何在上述实施例提供的构型基础上进行变换的内容,均属于本发明所保护的范围。本领域技术人员可以根据上述实施例的内容举一反三。
[0095]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0096]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

