1.本实用新型涉及船舶中养殖用无人船技术领域,特别是一种螃蟹用自动导航无人投料船。
背景技术:
2.自动导航控制技术是一种车辆自主沿规划路径行驶的反馈控制,应用于设施农业中可以将作业者从繁重、单一、重复的生产过程中解放出来,自动导航控制系统的主要技术分为三个部分,一是硬件部分,即如何利用各种导航定位传感器对农业机械的位姿进行精确测量,二是路径部分,即如何规划出合适的作业路径,该路径是农业机械导航瞄准的路径,规划的好坏直接影响导航的效果,三是算法部分,即如何根据偏差计算出农业车辆的前轮转角,从而修正偏差,与普通船相比,这种船安装的植入了一个芯片,它集成了自动投料、数字地图导航、风动矢量推进、太阳能充电等技术,只要一个人就能管理1000多亩的水域,全自动导航无人驾驶投料船的发明不仅大大降低人工成本,提高养殖效率,更填补了国内外的行业空白,促进了养殖鱼、虾、螃蟹等由传统模式向机械化、工业化模式转变,在水产养殖业领域,为了保证育苗的正常生长,需要定期向鱼塘内投撒水产养殖用饲料,以供鱼类螃蟹食用。
3.在现有的关于无人投料船的应用技术中,还具有以下缺点:
4.在现有技术中,养殖用的饲料仓往往是通过下料口进行投料,当饲料出现结块现象时,结块的饲料将造成下料口堵塞,导致下料口不能正常下料,就需要再次进行投料,费时费力,同时使得撒料面积也不均衡,影响螃蟹生长。
技术实现要素:
5.本实用新型的目的在于克服现有技术的缺点,提供一种螃蟹用自动导航无人投料船。
6.本实用新型的目的通过以下技术方案来实现:一种螃蟹用自动导航无人投料船,包括船体,所述船体的内部设置有饲料仓,所述饲料仓的内部设置有搅拌机构,所述饲料仓的底部一侧开设有下料槽,所述下料槽的底部一侧设置有调节机构;
7.所述搅拌机构包括第一电机,所述第一电机设置在饲料仓的顶部一侧,所述第一电机输出端设置有转动套,所述转动套的外表面转动连接有第一传动带,所述第一传动带的内部一侧啮合连接有第一齿轮,所述第一齿轮的外部一侧啮合连接有第二传动带,所述第一齿轮的底部一端固定连接有搅拌辊,所述转动套的一端设置有轴承。
8.优选的,所述饲料仓的顶部一侧设置有固定板,所述第一电机的一端固定连接在固定板的底部一侧。
9.通过采用上述技术方案,便于在实际使用中对第一电机的固定,使其较为稳固,增加第一电机在工作时的稳固性。
10.优选的,所述第一传动带的外表面设置有齿块,所述第一齿轮通过齿块与第一传
动带啮合。
11.通过采用上述技术方案,便于第一电机输出端带动转动套转动,从而带动第一传动带和第一齿轮转动。
12.优选的,所述第二传动带的内表面设置有齿块,所述第一齿轮通过齿块与第二传动带啮合。
13.通过采用上述技术方案,两侧的转动套带动第一传动带转动,第一传动带带动第一齿轮和第二传动带转动,第一齿轮带动搅拌辊在饲料仓内部转动,便于实现动力传动。
14.优选的,所述第一齿轮和搅拌辊的数量设置有多个,每个所述搅拌辊的外表面均固定连接有弯曲的搅拌齿。
15.通过采用上述技术方案,搅拌辊上设置的弯曲且尖锐的搅拌齿可对结块的饲料在转动过程中击碎,避免结块的饲料造成下料口堵塞,使饲料正常下料。
16.优选的,所述调节机构包括调节辊、调节杆、卡块、限位孔、限位螺栓、限位盘和限位槽。
17.通过采用上述技术方案,是组成此机构的必需组件,使调节机构正常使用。
18.优选的,所述调节辊转动连接在饲料仓的内部一侧,所述调节辊的外表面一侧固定连接有调节杆,所述调节杆的顶部一端固定连接有卡块,所述卡块的内部一侧开设有限位孔,所述限位孔的内部设置有限位螺栓,所述限位螺栓的一端设置有限位盘,所述限位盘的内部一侧开设有限位槽。
19.通过采用上述技术方案,便于调节机构的使用。
20.优选的,所述限位盘的底部一端与饲料仓的外部固定连接,所述卡块通过限位螺栓与限位盘连接,所述限位槽的数量开设有多个。
21.通过采用上述技术方案,将卡块内部的限位孔与限位盘内部的限位槽对准,通过限位螺栓进行固定,可旋转到需要的位置,增大调节范围。
22.优选的,所述调节辊的下方设置有投料口,所述船体的底部一侧设置有推动器,所述船体的顶部一侧安装有导航传感器,所述饲料仓的一端设置有放料口。
23.通过采用上述技术方案,将饲料通过放料口,倒入饲料仓内,便于推动器在导航传感器的功能作用下驱动投料船投料。
24.本实用新型具有以下优点:
25.1、该螃蟹用自动导航无人投料船,通过在饲料仓内部设置搅拌机构,在使用时,启动第一电机,第一电机输出端带动转动套转动,两侧的转动套带动第一传动带转动,第一传动带带动第一齿轮和第二传动带转动,第一齿轮带动搅拌辊在饲料仓内部转动,多个搅拌辊在饲料仓内部转动,对饲料进行搅拌,搅拌辊上设置的弯曲且尖锐的搅拌齿可对结块的饲料在转动过程中击碎,避免结块的饲料造成下料口堵塞,使饲料正常下料,从而在在一定程度上降低工人劳动力,省时省力,提高下料效率;
26.2、该螃蟹用自动导航无人投料船,通过在下料槽的下方设置调节机构,在使用时,搬动调节杆,调节杆进行旋转,从而带动调节辊旋转,调节杆顶部的卡块沿限位盘顶部外表面滑动,旋转到需要的位置时,将卡块内部的限位孔与限位盘内部的限位槽对准,通过限位螺栓进行固定,时调节辊的槽口出通过旋转与下料槽之间的间隙变小,从而实现控制饲料仓通过下料槽的下料速度和下料量,保证池塘内每一区域都能投入饲料,便于养殖池塘内
投料均匀,利于螃蟹的生长。
附图说明
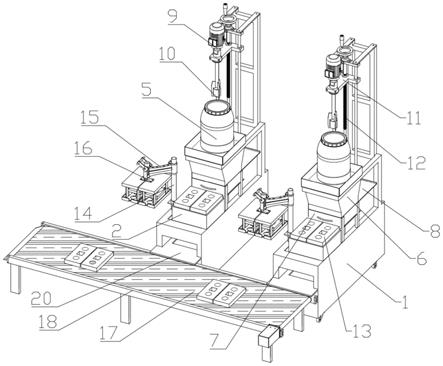
27.图1为本实用新型的结构示意图;
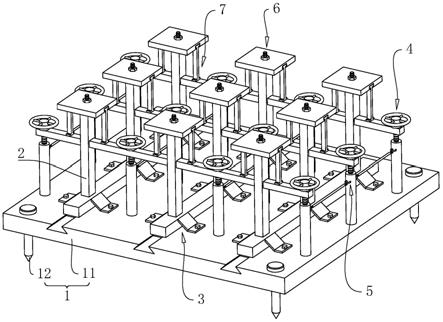
28.图2为本实用新型搅拌机构的结构示意图;
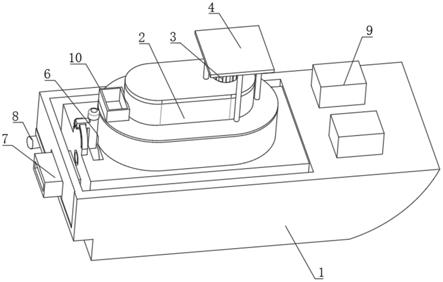
29.图3为本实用新型调节机构的正视剖视结构示意图;
30.图4为本实用新型调节机构的侧视剖视结构示意图
31.图5为本实用新型图4中a处的结构放大示意图;
32.图6为本实用新型调节机构的结构示意图;
33.图7为本实用新型调节机构的调整后的工作状态结构示意图。
34.图中:1
‑
船体,2
‑
饲料仓,3
‑
搅拌机构,301
‑
第一电机,302
‑
转动套,303
‑
第一传动带,304
‑
第一齿轮,305
‑
第二传动带,306
‑
搅拌辊,307
‑
轴承,4
‑
固定板,5
‑
下料槽,6
‑
调节机构,601
‑
调节辊,602
‑
调节杆,603
‑
卡块,604
‑
限位孔,605
‑
限位螺栓,606
‑
限位盘,607
‑
限位槽,7
‑
投料口,8
‑
推动器,9
‑
导航传感器,10
‑
放料口。
具体实施方式
35.下面结合附图对本实用新型做进一步的描述,但本实用新型的保护范围不局限于以下所述。
36.如图1
‑
7所示,一种螃蟹用自动导航无人投料船,它包括船体1,船体1的内部设置有饲料仓2,饲料仓2的内部设置有搅拌机构3,饲料仓2的底部一侧开设有下料槽5,下料槽5的底部一侧设置有调节机构6;
37.搅拌机构3包括第一电机301,第一电机301设置在饲料仓2的顶部一侧,第一电机301输出端设置有转动套302,转动套302的外表面转动连接有第一传动带303,第一传动带303的内部一侧啮合连接有第一齿轮304,第一齿轮304的外部一侧啮合连接有第二传动带305,第一齿轮304的底部一端固定连接有搅拌辊306,转动套302的一端设置有轴承307。
38.作为本实用新型一种优选技术方案,饲料仓2的顶部一侧设置有固定板4,第一电机301的一端固定连接在固定板4的底部一侧,固定板4通过多根圆柱固定在饲料仓2上,在实际使用中对第一电机301的固定,使其较为稳固,增加第一电机301在工作时的稳固性。
39.作为本实用新型一种优选技术方案,第一传动带303的外表面设置有齿块,第一齿轮304通过齿块与第一传动带303啮合,在使用时,启动第一电机301,第一电机301输出端带动转动套302转动。
40.作为本实用新型一种优选技术方案,第二传动带305的内表面设置有齿块,第一齿轮304通过齿块与第二传动带305啮合,在使用时,两侧的转动套302带动第一传动带303转动,第一传动带303带动第一齿轮304和第二传动带305转动,第一齿轮304带动搅拌辊306在饲料仓2内部转动。
41.作为本实用新型一种优选技术方案,第一齿轮304和搅拌辊306的数量设置有多个,每个搅拌辊306的外表面均固定连接有弯曲的搅拌齿,在使用时,搅拌辊306上设置的弯曲且尖锐的搅拌齿可对结块的饲料在转动过程中击碎,避免结块的饲料造成下料口堵塞,使饲料正常下料。
42.作为本实用新型一种优选技术方案,调节机构6包括调节辊601、调节杆602、卡块603、限位孔604、限位螺栓605、限位盘606和限位槽607。
43.作为本实用新型一种优选技术方案,调节辊601转动连接在饲料仓2的内部一侧,调节辊601的外表面一侧固定连接有调节杆602,调节杆602的顶部一端固定连接有卡块603,卡块603的内部一侧开设有限位孔604,限位孔604的内部设置有限位螺栓605,限位螺栓605的一端设置有限位盘606,限位盘606的内部一侧开设有限位槽607。
44.作为本实用新型一种优选技术方案,限位盘606的底部一端与饲料仓2的外部固定连接,卡块603通过限位螺栓605与限位盘606连接,限位槽607的数量开设有多个,在使用时,将卡块603内部的限位孔604与限位盘606内部的限位槽607对准,通过限位螺栓605进行固定,可旋转到需要的位置,增大调节范围。
45.作为本实用新型一种优选技术方案,调节辊601的下方设置有投料口7,船体1的底部一侧设置有推动器8,船体1的顶部一侧安装有导航传感器9,饲料仓2的一端设置有放料口10,在使用时,将饲料通过放料口10,倒入饲料仓2内,便于推动器8在导航传感器9的功能作用下驱动投料船投料。
46.本实用新型的工作过程如下:
47.s1、将饲料从放料口10倒入饲料仓2,启动第一电机301,第一电机301输出端带动转动套302转动,两侧的转动套302带动第一传动带303转动,第一传动带303带动第一齿轮304和第二传动带305转动;
48.s2、第一齿轮304带动搅拌辊306在饲料仓2内部转动,多个搅拌辊306在饲料仓2内部转动,对饲料进行搅拌;
49.s3、在下料槽5的下方设置调节机构6,在使用时,搬动调节杆602,调节杆602进行旋转,从而带动调节辊601旋转;
50.s4、调节杆602顶部的卡块603沿限位盘606顶部外表面滑动,旋转到需要的位置时,将卡块603内部的限位孔604与限位盘606内部的限位槽607对准,通过限位螺栓605进行固定,时调节辊601的槽口出通过旋转与下料槽5之间的间隙变小,从而实现控制饲料仓2通过下料槽5的下料速度和下料量;
51.s5、饲料从投料口7被导出,保证池塘内每一区域都能投入饲料,推动器8驱动投料船在养殖池塘内进行投料,导航传感器9,实现无人驾驶,远程遥控的目的,大大的节省了劳动力。
52.综上所述,船体1内设置有饲料仓2,通过在饲料仓2内部设置搅拌机构3,在使用时,将饲料从放料口10倒入饲料仓2,启动第一电机301,第一电机301输出端带动转动套302转动,两侧的转动套302带动第一传动带303转动,第一传动带303带动第一齿轮304和第二传动带305转动,第一齿轮304带动搅拌辊306在饲料仓2内部转动,多个搅拌辊306在饲料仓2内部转动,对饲料进行搅拌,搅拌辊306上设置的弯曲且尖锐的搅拌齿可对结块的饲料在转动过程中击碎,避免结块的饲料造成下料口堵塞,使饲料正常下料,从而在在一定程度上降低工人劳动力,省时省力,提高下料效率;通过在下料槽5的下方设置调节机构6,在使用时,搬动调节杆602,调节杆602进行旋转,从而带动调节辊601旋转,调节杆602顶部的卡块603沿限位盘606顶部外表面滑动,旋转到需要的位置时,将卡块603内部的限位孔604与限位盘606内部的限位槽607对准,通过限位螺栓605进行固定,使调节辊601的槽口出通过旋
转与下料槽5之间的间隙变小,从而实现控制饲料仓2通过下料槽5的下料速度和下料量,饲料从投料口7被导出,保证池塘内每一区域都能投入饲料,便于养殖池塘内投料均匀,利于螃蟹的生长,推动器8驱动投料船在养殖池塘内进行投料,导航传感器9,实现无人驾驶,远程遥控的目的,大大的节省了劳动力。
53.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。