1.本发明属于危险气体运输技术领域,涉及一种可调平、精确称重的磁吸式钢瓶推车使用方法及推车。
背景技术:
2.六氟化硫气体(sf6)是一种优异的绝缘介质,广泛应用于电力行业。sf6设备中气体压力通常要求一定压力值以保证绝缘性能,如果低于该额定值,设备不能正常工作。sf6绝缘电气设备受产品加工、安装工艺、运行时间和环境等因素影响,常出现不同程度的漏气缺陷,导致设备内部绝缘性能下降,影响设备的日常正常运行,需要带电补气。根据国家电网公司《高压开关设备运行规范》和文件规定,sf6气体压力降至报警值定性为严重缺陷。因此,sf6设备气体压力下降至报警值与额定值之间时,必须补气至额定值。
3.目前,人工补气时,需要搬运气瓶比较麻烦。使用钢瓶推车搬运钢瓶的操作也十分不便,一般需要两个人进行操作(如,一个人操控推车,另一个人把钢瓶挪到推车上),占用和消耗较多的人力和体力,存在危险因素。且补气人员有时需要多次搬抬气瓶,对其进行计量,从而填写六氟化硫气体使用情况统计表,利于掌握sf6气体库存量,耗时耗力。因此有必要设计一种钢瓶推车既无需人工搬抬气瓶移动位置,又可直接对钢瓶进行称重实时掌握钢瓶内内部气体的总质量,可及时掌握sf6气体补气量和剩余量,方便记录。但变电站站内有些路面路况不好,地面不平坦,难以保证推车能竖直立于水平面上。如推车立于一倾斜面上,使推车上的称重装置及钢瓶均处于倾斜状态,一方面导致钢瓶的重力不能垂直于称重装置的承重面,另一方面容易使钢瓶倚靠在其他机构上导致钢瓶的重量分散在称重装置以外的部件上,导致称重装置测得钢瓶重量发生偏差。
4.如图4所示,现有技术中,公开号为cn213168170u、公开日期为2021年05月11日的中国实用新型专利《一种可折叠称重的sf6补气作业小车》,该可折叠称重的sf6补气作业小车,采用可伸缩支撑杆,能够有效防止气瓶倾倒,有效保证补气工作过程中的人员和设备安全;且通过称重器可及时掌握sf6气体补气量和剩余量。
5.但是上述实用新型专利的技术方案并未解决如何在倾斜的工作面上精确称重的问题。因此,亟需设计一种钢瓶推车,实现在一定倾斜角度的地面上既能保持钢瓶垂直,又能对钢瓶真实重量进行精确测量。
技术实现要素:
6.本发明所要解决的技术问题在于如何降低人工搬运钢瓶带来的体力消耗以及推车在倾斜角度的地面上无法精确称重的问题。
7.本发明是通过以下技术方案解决上述技术问题的:
8.一种可调平、精确称重的磁吸式钢瓶推车的使用方法,所述的可调平、精确称重的磁吸式钢瓶推车包括:抓取升降机构(1)、推车固定架底座(20)、调平杆(21);所述的抓取升降机构(1)包括:抓取升降机构本体(10)、连接横杆(11)、水平陀螺仪(12)、悬臂式称重传感
器(13)、电磁铁(14);所述的调平杆(21)均匀的设置在抓取升降机构本体(10)周围,调平杆(21)的一端固定在推车固定架底座(20)上、另一端与连接横杆(11)的底部可旋转连接,所述的悬臂式称重传感器(13)的一端固定设置在连接横杆(11)上、悬臂式称重传感器(13)的另一端与抓取升降机构本体(10)固定连接;所述的水平陀螺仪(12)水平安装在抓取升降机构本体(10)的顶部,用于测量抓取升降机构本体(10)的倾斜角度;所述的电磁铁(14)固定设置在抓取升降机构本体(10)的右侧;所述的调平杆(21)共有四组,分别为:第一调平杆(211)、第二调平杆(212)、第三调平杆(213)、第四调平杆(214);第一调平杆(211)、第二调平杆(212)、第三调平杆(213)、第四调平杆(214)均匀的设置在抓取升降机构本体(10)周围;所述的使用方法包括以下步骤:
9.s1、抓取钢瓶,具体为:将推车靠近钢瓶,调整调平杆(21)的伸缩以控制电磁铁(14)的高度与钢瓶相配合,此时接通电磁铁(14)的电源,电磁铁(14)得电时产生磁场从而抓取钢瓶(30),此时,抓取升降机构(1)将电磁铁(14)和钢瓶抬起,从而使得钢瓶脱离地面。
10.s2、姿态调平,具体为:水平陀螺仪(12)检测抓取升降机构本体(10)的在倾斜的工作面的沿x、y轴产生的倾斜角度,根据倾斜角度调整每个调平杆(21)的伸缩长度,使得抓取及升降机构(10)和钢瓶始终保持垂直与水平面,当水平陀螺仪(12)检测到抓取升降机构本体(10)的x轴与水平面存在倾斜角时,控制第一调平杆(211)、第二调平杆(212)缩短或伸长,第三调平杆(213)、第四调平杆对应伸长或缩短来将x轴调回至水平面;当水平陀螺仪(12)检测到抓取升降机构本体(10)的y轴与水平面存在倾斜角时,控制第一调平杆(211)、第三调平杆(213)缩短或伸长,第二调平杆(212)、第四调平杆(214)伸长或缩短来将y轴调回至水平面。
11.本发明的技术方案的抓取升降机构(1)采用电磁铁(14)通电产生磁力对钢瓶进行抓取,全程电力驱动,无需人工搬运钢瓶,省力可靠;水平陀螺仪(12)与四根调平杆配合使用,对抓取升降机构(1)及其抓取的钢瓶的姿态在x、y轴两个方位上同时调平,使其姿态始终保持与水平面垂直,使得悬臂式称重传感器(13)的在测量钢瓶的重量过程中不会因钢瓶倾斜导致测量产生误差,测量精度高,推车可以适应各种崎岖不平的路况,使用范围广。
12.一种可调平、精确称重的磁吸式钢瓶推车,包括:抓取升降机构(1)、推车固定架底座(20)、调平杆(21);所述的抓取升降机构(1)包括:抓取升降机构本体(10)、连接横杆(11)、水平陀螺仪(12)、悬臂式称重传感器(13)、电磁铁(14);所述的调平杆(21)均匀的设置在抓取升降机构本体(10)周围,调平杆(21)的一端固定在推车固定架底座(20)上、另一端与连接横杆(11)的底部可旋转连接,所述的悬臂式称重传感器(13)的一端固定设置在连接横杆(11)上、悬臂式称重传感器(13)的另一端与抓取升降机构本体(10)固定连接;所述的水平陀螺仪(12)水平安装在抓取升降机构本体(10)的顶部,用于测量抓取升降机构本体(10)的倾斜角度;所述的电磁铁(14)固定设置在抓取升降机构本体(10)的右侧;推车抓取钢瓶的方法为:将推车靠近钢瓶,调整调平杆(21)的伸缩以控制电磁铁(14)的高度与钢瓶相配合,此时接通电磁铁(14)的电源,电磁铁(14)得电时产生磁场从而抓取钢瓶(30),此时,抓取升降机构(1)将电磁铁(14)和钢瓶抬起,从而使得钢瓶脱离地面。
13.作为本发明技术方案的进一步改进,所述的调平杆(21)共有四组,分别为:第一调平杆(211)、第二调平杆(212)、第三调平杆(213)、第四调平杆(214);第一调平杆(211)、第二调平杆(212)、第三调平杆(213)、第四调平杆(214)均匀的设置在抓取升降机构本体(10)
周围。
14.作为本发明技术方案的进一步改进,推车姿态调平的方法为:水平陀螺仪(12)检测抓取升降机构本体(10)的在倾斜的工作面的沿x、y轴产生的倾斜角度,根据倾斜角度调整每个调平杆(21)的伸缩长度,使得抓取及升降机构(10)和钢瓶始终保持垂直与水平面。
15.作为本发明技术方案的进一步改进,所述的抓取及升降机构(10)和钢瓶始终保持垂直与水平面的方法具体为:当水平陀螺仪(12)检测到抓取升降机构本体(10)的x轴与水平面存在倾斜角时,控制第一调平杆(211)、第二调平杆(212)缩短或伸长,第三调平杆(213)、第四调平杆对应伸长或缩短来将x轴调回至水平面;当水平陀螺仪(12)检测到抓取升降机构本体(10)的y轴与水平面存在倾斜角时,控制第一调平杆(211)、第三调平杆(213)缩短或伸长,第二调平杆(212)、第四调平杆(214)伸长或缩短来将y轴调回至水平面。
16.本发明的优点在于:
17.本发明的技术方案的抓取升降机构(1)采用电磁铁(14)通电产生磁力对钢瓶进行抓取,全程电力驱动,无需人工搬运钢瓶,省力可靠;水平陀螺仪(12)与四根调平杆配合使用,对抓取升降机构(1)及其抓取的钢瓶的姿态在x、y轴两个方位上同时调平,使其姿态始终保持与水平面垂直,使得悬臂式称重传感器(13)的在测量钢瓶的重量过程中不会因钢瓶倾斜导致测量产生误差,测量精度高,推车可以适应各种崎岖不平的路况,使用范围广。
附图说明
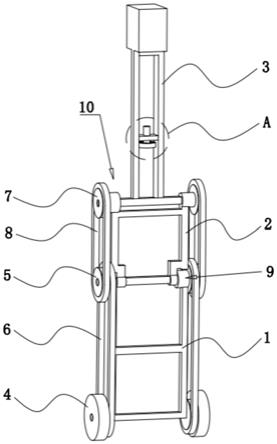
18.图1是本发明实施例一的一种可调平、精确称重的磁吸式钢瓶推车的结构图;
19.图2是本发明实施例一的调平杆安装示意图;
20.图3是本发明实施例一的一种可调平、精确称重的磁吸式钢瓶推车的称重装置采用悬臂式称重传感器的测量原理示意图;
21.图4是现有技术的钢瓶推车的结构图。
具体实施方式
22.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.下面结合说明书附图以及具体的实施例对本发明的技术方案作进一步描述:
24.实施例一
25.1、本实施例的钢瓶推车的结构组成
26.如图1和图2所示,一种可调平、精确称重的磁吸式钢瓶推车,包括:抓取升降机构1、推车固定架底座20、调平杆21、钢瓶30;所述的抓取升降机构1包括:抓取升降机构本体10、连接横杆11、水平陀螺仪12、悬臂式称重传感器13、电磁铁14。
27.所述的调平杆21共有四组,分别为:第一调平杆211、第二调平杆212、第三调平杆213、第四调平杆214,四组调平杆21均匀的设置在抓取升降机构本体10周围,每组所述的调平杆21的一端采用螺栓固定在推车固定架底座20上、另一端与连接横杆11的底部采用铰链可旋转连接,所述的悬臂式称重传感器13的一端固定设置在连接横杆11上、悬臂式称重传
感器13的另一端与抓取升降机构本体10固定连接(图1中的悬臂式称重传感器13垂直于纸面安装);所述的水平陀螺仪12水平安装在抓取升降机构本体10的顶部,用于测量抓取升降机构本体10的倾斜角度;所述的电磁铁14共有两组,两组所述的电磁铁14固定设置在抓取升降机构本体10的右侧,电磁铁14得电时产生磁场,从而抓取钢瓶30。
28.2、推车在倾斜的工作面时进行精确称重的工作原理
29.(1)抓取钢瓶
30.将推车靠近钢瓶30,调整调平杆21的伸缩以控制电磁铁14的高度与钢瓶30相配合,此时接通电磁铁14的电源,电磁铁14得电时产生磁场从而抓取钢瓶30,此时,抓取升降机构1内置升降单元,将电磁铁14和钢瓶30抬起,从而使得钢瓶30脱离地面。
31.(2)姿态调平
32.水平陀螺仪12检测抓取升降机构本体10的在倾斜的工作面的沿x、y轴产生的倾斜角度,根据倾斜角度调整每个调平杆21的伸缩长度,使得抓取及升降机构10和钢瓶30始终保持垂直与水平面,具体为:当水平陀螺仪12检测到x轴与水平面成一倾斜角时,可控制第一调平杆211、第二调平杆212缩短或伸长,第三调平杆213、第四调平杆对应伸长或缩短来将x轴调回至水平面;同理,当水平陀螺仪12检测到y轴与水平面成一倾斜角时,控制第一调平杆211、第三调平杆213缩短或伸长,第二调平杆212、第四调平杆214伸长或缩短来将y轴调回至水平面。
33.3、试验对比
34.如图3所示,称重装置采用悬臂式测量原理,当推车位于倾斜的地面时,地面的倾斜角度为α,称重装置检测到的受力如式(1)所示。
35.f=g
×
lcosα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
36.式中:f表示称重装置检测到的受力,n
·
m;g表示抓取及升降机构及钢瓶的总重力,n;l表示称重装置的臂长,m;α表示称重装置与水平之间的夹角。
37.由式(1)可知,称重装置与水平之间的夹角越大,称重装置所测得数值离真实数值偏差越大。
38.采用1号、2号钢瓶推车进行的对比试验,1号钢瓶推车为本实施例的推车,1号钢瓶推车为普通的钢瓶推车。采用1号、2号钢瓶推车进行的对比试验并计算与真实的钢瓶重量之间的误差,结果如下表所示。
39.表1 1号、2号钢瓶推车在不同倾斜地面上的测量精度
40.41.有上表可知,本实施例提供的水平精确称重的钢瓶推车1号在不同倾斜角度的地面进行称重所得结果基本不变;而普通的钢瓶搬运推车2号的称重结果受地面倾斜度影响较大,且倾斜度越大,误差越大。
42.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。