1.本实用新型属于移动设备技术领域,具体涉及一种双驱动三导向装置。
背景技术:
2.在玩具行业与健身器械业内,运动玩具(器械)一种是包括使用电动力进行驱动,另外一种是依靠人工动力移动的机械机构。其中,电动力的运动玩具和器械成本相对较高,健身效果一般,而依靠人工动力移动的机械机构,例如移动木马,既能够起到一定的健身效果,同时具有一定的娱乐性和安全性,可以供儿童玩耍。
3.现有技术中,移动木马的移动装置有很多,例如现有的可参考的公告号为cn2109229u的中国实用新型专利,其公开了一种利用骑乘者自重的玩具驱动装置,它包括菱形连杆机构、座杆、前、后叉架、成对的前、后支脚、脚蹬和方向控制部件;连杆机构的上下连杆之间设有弹簧,连杆机构中的下后部连杆后端具有外伸部;座杆的前端固定在连杆机构的上铰接点上,其后端和外伸部之间通过短杆铰连,前、后支脚的底部装有轮子,轮子和支脚的侧面装有棘轮、棘爪。这种玩具驱动装置,结构相对复杂、零件很多,装配、调整、维护、移动相对困难,加工成本相对较大。
技术实现要素:
4.针对上述现有技术中存在的问题,本实用新型的目的在于提供一种双驱动三导向装置,通过第一驱动机构、第二驱动机构和导向机构控制前腿机构和后腿机构向前移动,具备多种驱动模式,且该装置结构精简,加工成本相对较低,装配、调整、维护、移动时相对方便、简单。
5.为了实现上述实用新型目的,本实用新型提供的一个技术方案如下:
6.一种双驱动三导向装置,包括机架、后腿机构和前腿机构,所述机架一端水平设置有水平轴,所述水平轴转动连接后腿机构;在所述机架下侧设置有带动所述后腿机构沿所述水平轴向前或向后转动的第一驱动机构;所述机架另一端沿竖直方向转动连接有竖直轴;所述竖直轴下端连接前腿机构,在所述竖直轴上端连接有导向机构;所述前腿机构的下端设置有第一单向轮,在所述后腿机构的下端设置有第二单向轮。
7.优选的,所述后腿机构远离所述第二单向轮的一端设置有连接套筒,所述连接套筒套接于所述水平轴的外侧;所述第一驱动机构连接所述连接套筒,且带动所述连接套筒绕所述水平轴旋转。
8.优选的,所述第一驱动机构包括第一连杆、第二连杆和驱动杆,所述第一连杆的一端与所述第二连杆的一端转动连接,所述第一连杆远离所述第二连杆的一端与连接套筒固定,所述第二连杆远离所述第一连杆的一端与所述驱动杆固定;所述机架上设置有连接轴,所述第二连杆中部与所述连接轴转动连接。
9.优选的,所述机架下侧间隔设置有两块支撑块,所述连接轴固定于两块所述支撑块之间;所述第一连杆靠近第二连杆的一端开设有腰形孔,所述腰形孔长度方向平行所述
第一连杆长度方向,在所述第二连杆上设置有销轴,所述销轴穿过所述腰形孔。
10.优选的,所述前腿机构包括沿竖直方向间隔设置的第一支撑杆和第二支撑杆,在所述第一支撑杆和第二支撑杆的同一端固定有支撑臂,所述支撑臂与所述竖直轴固定;所述第一支撑杆和第二支撑杆远离所述支撑臂的一端设置所述第一单向轮;所述第一支撑杆和第二支撑杆上设置有第二驱动机构,所述第二驱动机构控制所述第一支撑杆和第二支撑杆绕所述竖直轴旋转。
11.优选的,所述第二驱动机构包括固定在所述第一支撑杆上的第一脚踏和固定在所述第二支撑杆上的第二脚踏。
12.优选的,所述导向机构包括固定于所述竖直轴上端的连接头、第一导向杆和第二导向杆,所述第一导向杆和第二导向杆相互垂直,且固定连接;在所述连接头上开设有容纳槽,所述第一导向杆远离所述第二导向杆的一端转动连接于所述容纳槽内,在所述连接头上可拆卸设置有连接销,所述连接销与所述第一导向杆转动连接。
13.优选的,所述机架上侧设置有座椅。
14.本实用新型提供了一种双驱动三导向装置,通过设置的第一驱动机构、第二驱动机构、导向机构可以控制前腿机构和后腿机构向前行走,达到前行的效果,本方案通过设置的多种驱动方式和转向方式,提供了更多的操作选择模式,趣味性更强。相比于现有的移动机构,结构更加的精简,在控制、使用时更加的简便,在制造、安装、维修时更加的便利,且成本更低。
附图说明
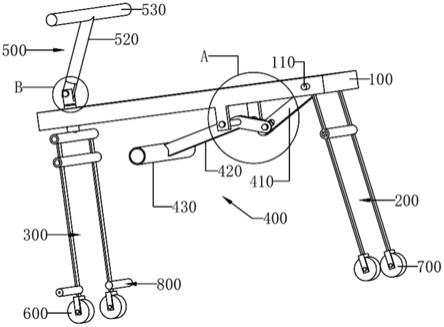
15.图1为本实用新型一种双驱动三导向装置的结构示意图;
16.图2为图1中a结构的放大图;
17.图3为图1中b结构的放大图;
18.图4为本实用新型一种双驱动三导向装置中突出机架结构的示意图;
19.图5为本实用新型中一种双驱动三导向装置中突出后腿机构的示意图;
20.图6为本实用新型中一种双驱动三导向装置中突出前腿机构的示意图;
21.图7为本实用新型中一种双驱动三导向装置中突出座椅的示意图。
22.图中附图标记:
23.100、机架;110、水平轴;120、竖直轴;130、连接轴;140、支撑块;
24.200、后腿机构;210、连接套筒;
25.300、前腿机构;310、第一支撑杆;320、第二支撑杆;330、支撑臂;
26.400、第一驱动机构;410、第一连杆;411、腰形孔;420、第二连杆;430、驱动杆;440、销轴;
27.500、导向机构;510、连接头;511、容纳槽;512、连接销;520、第一导向杆;530、第二导向杆;
28.600、第一单向轮;
29.700、第二单向轮;
30.800、第二驱动机构;810、第一脚踏;820、第二脚踏;
31.900、座椅。
具体实施方式
32.为了使本实用新型的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本实用新型做进一步说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.实施例
34.本实用新型提供了一种双驱动三导向装置,参见图1
‑
图7,包括机架100、后腿机构200和前腿机构300,机架100一端水平设置有水平轴110,水平轴110转动连接后腿机构200;在机架100下侧设置有带动后腿机构200沿水平轴110向前或向后转动的第一驱动机构400;机架100另一端沿竖直方向转动连接有竖直轴120;竖直轴120下端连接前腿机构300,在竖直轴120上端连接有导向机构500;前腿机构300的下端设置有第一单向轮600,在后腿机构200的下端设置有第二单向轮700。
35.需要说明的是,上文中记载的"向前"指的是前腿机构300远离后腿机构200的方向,"向后"指的是后腿机构200远离前腿机构300的方向。第一单向轮600、第二单向轮700可以单向向前移动,不能够向后移动。
36.在使用时,操作人员坐在机架100上侧,通过操作第一驱动机构400控制后腿机构200向前或向后转动,当后腿机构200向前转动时,第二单向轮700向前转动,当后腿机构200相对机架100向后转动时,此时第二单向轮700保持静止,同时,前腿机构300向前移动,进而实现整体装置的前移。在移动过程中,可以通过操作导向机构500控制前进方向。
37.具体的,后腿机构200远离第二单向轮700的一端设置有连接套筒210,连接套筒210套接于水平轴110的外侧;连接套筒210可以相对水平轴110旋转。第一驱动机构400连接于连接套筒210上,且带动连接套筒210绕水平轴110旋转。
38.第一驱动机构400包括第一连杆410、第二连杆420和驱动杆430。第一连杆410的一端与第二连杆420的一端转动连接,第一连杆410远离第二连杆420的一端与连接套筒210固定。第二连杆420远离第一连杆410的一端与驱动杆430固定。机架100上设置有连接轴130,第二连杆420中部与连接轴130转动连接,其中,驱动杆430垂直第一连杆410。在工作时,通过操作驱动杆430,带动第二连杆420绕连接轴130转动,在转动过程中,带动第一连杆410绕着水平轴110转动,进而带动连接套筒210旋转。
39.更好的,在机架100下侧间隔设置有两块支撑块140,连接轴130固定于两块支撑块140之间。
40.第一连杆410靠近第二连杆420的一端开设有腰形孔411,腰形孔411长度方向平行第一连杆410长度方向,在第二连杆420上设置有销轴440,销轴440穿过所述腰形孔411。通过该设置,在使用时,第一驱动机构400位于机架100的下侧,在转动过程中,第一连杆410和第二连杆420在腰形孔411处活动连接,进而在第二连杆420转动时能够实现带动第一连杆410转动。
41.前腿机构300包括沿竖直方向间隔设置的第一支撑杆310和第二支撑杆320。在第一支撑杆310和第二支撑杆320的同一端固定有支撑臂330,支撑臂330的两端分别于第一支撑杆310和第二支撑杆320固定,在支撑臂330的上侧与竖直轴120一端固定。竖直轴120另一端穿过机架100,于机架100上侧连接导向机构500。
42.具体的,导向机构500包括固定于竖直轴120上端的连接头510、第一导向杆520和第二导向杆530。第一导向杆520和第二导向杆530相互垂直,且固定连接。在连接头510上开设有容纳槽511,第一导向杆520远离第二导向杆530的一端转动连接于容纳槽511内,在连接头510上可拆卸设置有连接销512,连接销512与第一导向杆520转动连接。在使用时,可以操作第二导向杆530,使第一导向杆520绕连接销512转动至竖直位置,或者转动至水平位置进行转向操作,具体操作时,当转动至竖直位置时,可以通过双手操作,当转动至水平位置时,可以通过膝盖或手操作均可。其中,连接销512可拆卸连接于连接头510上侧。
43.第一支撑杆310和第二支撑杆320远离支撑臂330的一端设置第一单向轮600。第一支撑杆310和第二支撑杆320上设置有第二驱动机构800,第二驱动机构800控制第一支撑杆310和第二支撑杆320绕竖直轴120旋转。
44.第二驱动机构800包括固定在第一支撑杆310上的第一脚踏810、和固定在第二支撑杆320上的第二脚踏820。在使用时,可以通过控制第一脚踏810和第二脚踏820进行驱动。
45.仿上段示例如下:在使用时,双脚分别踩在第一脚踏810和第二脚踏820上,然后通过第一脚踏810和第二脚踏820控制第一支撑杆310和第二支撑杆320绕着竖直轴120转动,当第一支撑杆310向前转动时,带动第一支撑杆310上的第一单向轮600向前移动,第二支撑杆320受到向后的作用力,由于第一单向轮600的单向移动效果,第二支撑杆320并不能够向后移动,当控制第二脚踏820向前移动时,第二支撑杆320向前移动,以此往复,实现控制第一支撑杆310、第二支撑杆320交替向前移动,进而实现向前驱动,于此同时,可以通过控制第一支撑杆310和第二支撑杆320向前移动的幅度大小通过轮差的方式,实现转向控制。。
46.进一步的,为了提高了操作人员操作的体验度,在机架100上侧设置有座椅900,方便操作人员乘坐。
47.在使用双驱动三导向装置前行时,操作人员坐在机架100上侧或者座椅900上,可以选择第一驱动机构400进行驱动,或者选择第二驱动机构800进行驱动。
48.具体的,当选择第一驱动机构400驱动时,操作人员的双脚踩在驱动杆430上,向下踩驱动杆430,驱动杆430带动第二连杆420绕着连接轴130旋转,进而第二连杆420带动第一连杆410转绕水平轴110旋转,在旋转过程中带动连接套筒210转动,继而带动后腿机构200向前摆动,此时后腿机构200向前移动,机架100向上翘起。当双脚不向驱动杆430施加外力时,在操作人员重力的作用下,机架100向下摆动,此时,后腿机构200在第二单向轮700的作用下,并不能够向后移动,前腿机构300在第一单向轮600的作用下向前移动。当选择第二驱动机构800进行驱动时,双脚踩在第一脚踏810和第二脚踏820上进行驱动。在转向过程中,可以选择导向机构500或者第二驱动机构800进行导向。
49.本实用新型提供了一种双驱动三导向装置,通过设置的第一驱动机构400、第二驱动机构800、导向机构500可以控制前腿机构300和后腿机构200向前行走,达到前行的效果,本方案通过设置的多种驱动方式和转向方式,提供了更多的操作选择模式,趣味性更强。相比于现有的移动机构,结构更加的精简,在控制、使用时更加的简便。在制造、安装、维修时更加的便利,且成本更低。
50.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件
必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
51.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接、可以是机械连接,也可以是电连接、可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
52.以上所述实施例仅表达了本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

