1.本发明涉及使汽车等车辆产生偏航的车辆偏航因素的推定装置及车辆转向装置。
背景技术:
2.车辆的偏航是与车辆的直线行驶度有关的现象之一,例如由于路面的横向倾斜度(倾斜角/斜面角)或侧风等,车辆偏向一侧驶去的现象。
3.例如,当道路存在倾斜角时,手动驾驶中的驾驶者可以通过从转向反作用力等获得信息来保持方向,使车辆维持在车道的中央行驶。
4.另一方面,当进行转向辅助控制或自动驾驶控制时,通过使用例如立体相机等环境识别器件来检测自车辆在车道中的横向位置,在检测到偏航引起的位移的情况下,执行转向校正。但还是期望推定路面的倾斜角等导致车辆偏航的因素,并在实际发生偏航之前将其反映在转向控制中。
5.作为关于推定路面的倾斜角的以往技术,例如在专利文献1中,记载了通过使用从由ccd相机拍摄的图像识别的车辆的车道偏离状况以及作用于车辆的横向加速度,检测路面的横向坡度(斜面)。
6.专利文献1:日本特开2007
‑
210412号公报
技术实现要素:
7.在专利文献1记载的技术中,仅基于车辆的横向加速度来检测不发生车道偏离程度的路面坡度,但是例如由于悬架的阻尼器摩擦等,实际上存在即使有微小的路面坡度也难以检测到的盲区。
8.例如,为了提高转向辅助控制和自动驾驶控制中的车道跟踪性能,需要从微小区域高精确地检测路面坡度等成为车辆偏航的主要原因的因素。
9.鉴于上述问题,本发明的目的在于提供一种车辆偏航因素推定装置及转向装置,其可以高精确地检测引起车辆偏航的车辆偏航因素。
10.本发明通过以下解决方案来解决上述问题。
11.技术方案1的本发明提供一种车辆偏航因素推定装置,其特征在于,包括:车轮作用力传感器,检测对车轮的作用力;接地载荷中心计算部,基于所述车轮作用力传感器的输出来计算接地载荷中心的位置;以及车辆偏航因素推定部,基于所述接地载荷中心的横向位移来推定车辆偏航因素。
12.技术方案2的发明根据技术方案1所述的车辆偏航因素推定装置,其特征在于,所述车辆偏航因素包括路面的横向倾斜度和由车身承受的侧风中的至少之一。
13.例如,当由于路面的横向坡度、侧风等而成为车辆产生偏航的状况时,发生车轮的接地载荷中心的横向位移。
14.根据本发明,通过基于车轮作用力传感器的输出来计算接地载荷中心的横向位移,能够高精度地检测例如因车身弹簧的上部行为等而难以检测的微小的车辆偏航因素
(路面的横向坡度、侧风等)。
15.技术方案3的发明根据技术方案1或2所述的车辆偏航因素推定装置,其特征在于,所述车轮作用力传感器分别设置于左车轮和右车轮,所述车辆偏航因素推定部仅在左车轮和右车轮的所述接地载荷中心的横向位移在相同方向上时进行所述车辆偏航因素的推定。
16.据此,能够预防由于车身的弹簧共振(所谓的弹跳)等引起的接地载荷中心的位移而错误地推定车辆偏航因素。
17.技术方案4的发明根据技术方案1至3中的任一项所述的车辆偏航因素推定装置,其特征在于,所述车轮作用力传感器分别设置于左车轮和右车轮,所述车辆偏航因素推定部仅在左车轮和右车轮的所述接地载荷中心的横向位移量的左右两侧之差在预定范围内时进行所述车辆偏航因素的推定。
18.据此,能够防止在接地载荷中心的位移的左右两侧差大的车辙道路等中车辆偏航因素的推定精度降低。
19.技术方案5的发明提供一种转向装置,包括:致动器,操纵车辆的方向盘;以及转向控制部,控制所述致动器产生的力,所述转向控制部根据由技术方案1至4中任一项所述的车辆偏航因素推定装置得出的推定结果,校正所述致动器产生的力。
20.据此,通过高精度地推定车辆偏航因素并反映到用于转向的致动器所产生的力控制中,能够适当地防止车辆偏航而提高直线行驶性、平缓弯道的线性追踪性。
21.如上所述,根据本发明,可以提供一种车辆偏航因素推定装置及转向装置,其可以高精确地检测引起车辆偏航的车辆偏航因素。
附图说明
22.图1是示意性示出适用本发明的车辆偏航因素推定装置及转向装置的实施方式的结构的图。
23.图2a、图2b是示出实施方式中的轮毂单元的图。
24.图3是实施方式的六分量力检测装置中的敏感体的沿包括中心轴线的平面剖切并观察的剖面图。
25.图4是示意性示出实施方式的六分量力检测装置中的应变仪的配置的立体图。
26.图5a、图5b、图5c是示出实施方式的六分量力检测装置中的力检测系的应变仪的配置和桥接电路的结构的图。
27.图6a、图6b、图6c是示出实施方式的六分量力检测装置中的力矩检测系的桥接电路的结构的图。
28.图7是示意性示出车轮的车轮中心、轮胎接地载荷中心及其作用力的图。
29.图8是示出实施方式的车辆偏航因素推定装置及转向装置的工作的流程图。
30.图9是示出实施方式的转向装置中的接地载荷中心的横向位移和追加的转向转矩之间的相关关系的一例的图。
31.(附图标记说明)
32.1:转向装置;10:方向盘;20:转向轴;21:万向节;22:小齿轮;30:齿条轴;31:齿条齿轮;40:齿条壳体;41:齿条罩靴;50:拉杆;51:球形接头;52:球形接头;60:壳体;61:转向节臂;w:车轮;70:转矩传感器;80:致动器单元;81:电动机;82齿轮箱;90:转向控制单元;
100:轮毂单元;110:轮毂;111:圆盘部;112中央部;113:驱动轴安装部;114:外筒部;115:轴承固定环;120:轴承;121:外圈;122:内圈;123:钢球;130:感应部;131:圆盘部;132:外筒部;133:轴承固定环;140:安装部;141:安装用凸片;200:六分量力检测装置;210:敏感体;211:圆筒部;212:第一凸缘;212a:螺纹孔;213:第二凸缘;213a:螺纹孔;214:中间部;215:中间部;r1~r8:倒角部;221~224:fx检测系的单轴应变仪;231~234:fy检测系的单轴应变仪;241~244:fz检测系的单轴应变仪;251~254:mx检测系的单轴应变仪;261~264:my检测系的单轴应变仪;271~274:mz检测系的剪切应变仪;f:焦点;b:轮毂螺栓;300:斜率推定单元;310:车速传感器;320:环境识别单元;321:立体相机装置。
具体实施方式
33.以下,说明适用了本发明的车辆偏航因素推定装置及转向装置的实施方式。
34.实施方式的车辆偏航因素推定装置及转向装置设置在例如乘用车等汽车中。转向装置用于使作为转向轮的前轮转向。
35.实施方式的转向装置包括小齿轮辅助型电动助力转向(eps)装置。
36.图1是示意性示出实施方式的车辆偏航因素推定装置及转向装置的结构的图。
37.转向装置1包括方向盘10、转向轴20、齿条轴30、齿条壳体40、拉杆50、壳体60、转矩传感器70、致动器单元80、转向控制单元90等。
38.方向盘10是环状的操作构件,其通过驾驶者旋转来输入转向操作。
39.方向盘10在车辆的车室中配置成面对驾驶座。
40.转向轴20是其一端部安装到方向盘10的旋转轴,并且是将方向盘10的旋转运动传递到将其转换成平移运动的齿条齿轮机构的旋转轴。
41.在转向轴20的中间部,设置有能够在转向轴20弯曲的状态下传递旋转的万向节21。
42.在转向轴20的与方向盘10侧相反一侧的端部形成有构成齿条齿轮机构的一部分的小齿轮22。
43.齿条轴30是长度方向(轴向)沿着车宽方向配置的柱状的构件。
44.齿条轴30被支承为能够相对于车身在车宽方向上平移。
45.在齿条轴30的一部分形成有与小齿轮22啮合的齿条31。
46.响应转向轴20的旋转而由小齿轮22驱动齿条31,齿条轴30沿车宽方向平移(直行)。
47.齿条31配置成在车宽方向上偏向左侧或右侧(通常是驾驶座侧)。
48.例如,当车辆是以右前座椅作为驾驶座的所谓的右舵车辆时,齿条31配置成偏靠中立时的中央的右侧。
49.齿条壳体40是大致圆筒状的构件,其支承并容纳齿条轴30,使其可沿车宽方向相对位移。
50.在齿条壳体40的两端部设置有齿条罩靴41。
51.齿条罩靴41是在允许拉杆50相对于齿条壳体40的相对位移的同时防止灰尘等异物进入齿条壳体40内的构件。
52.齿条罩靴41例如由弹性体等树脂类材料形成为挠性的波纹管状。
53.拉杆50是轴状的联动构件,其连结齿条轴30的端部和壳体60的转向节臂61,使壳体60与齿条轴30的平移运动联动地绕主销轴转动。
54.拉杆50在车宽方向内侧的端部经由球形接头51可摆动地连接到齿条轴30的端部。
55.拉杆50在车宽方向外侧的端部经由球形接头52连接到壳体60的转向节臂61。
56.在拉杆50和球形接头52之间的连接部,设置有用于调节前束力的校正螺杆机构(未图示)。
57.壳体(转向节)60是容纳轮毂轴承的构件,该轮毂轴承将车轮w可绕车轴旋转地支承。
58.壳体60具有形成为相对于车轴向前侧或后侧凸出的转向节臂61。
59.壳体60被可绕主销轴线转动地支承,该主销轴线是预定的旋转中心轴线。
60.例如,当车辆的前悬架为麦弗逊式支柱类型时,主销轴线是将支柱顶部安装轴承的中心与连接壳体60下部和横向连杆(下臂)的球形接头的中心相连的虚拟轴线。
61.利用齿条轴30经由拉杆50在车宽方向上推拉壳体60,从而壳体60绕主销轴线转动并使车轮w转向。
62.转矩传感器70是检测作用于转向轴20的转矩的传感器。
63.转矩传感器70设置在转向轴20的中间部分。
64.转矩传感器70的输出传送到转向控制单元90。
65.致动器单元80是在转向轴20中的小齿轮22附近区域进行旋转驱动,以在手动驾驶时进行动力辅助而在自动驾驶时进行转向工作的驱动装置。
66.致动器单元80包括电动机81、齿轮箱82等。
67.电动机81是电动致动器,其产生施加到转向轴20的驱动力。
68.电动机81的旋转方向和输出转矩由转向控制单元90控制。
69.齿轮箱82包括减速齿轮系,该减速齿轮系用于使电动机81的旋转输出减速(转矩增大)并将其传递至转向轴20。
70.转向控制单元90是向电动机81提供旋转方向和输出转矩的指令值的控制装置。
71.转向控制单元90在车辆的手动驾驶时基于转矩传感器70的转矩输入方向和检测到的转矩值,设定给予电动机81的指令值。
72.另外,在车辆的自动驾驶时或驾驶辅助控制(例如,车道保持辅助等)时,转向控制单元90基于从自动驾驶控制装置(未图示)给出的指令,设定给予电动机81的指令值。
73.在实施方式中,车轮w由以下说明的轮毂单元支承。
74.图2a、图2b是示出实施方式中的轮毂单元的图,图2a是用穿过车轴(车轮的旋转中心轴线)的铅锤平面截取并观察的截面图,图2b是沿图2a的b
‑
b线的向视图。
75.如图2a、图2b所示,轮毂单元100包括轮毂110、轴承120、感应部130、安装部140、六分量力检测装置200等。
76.轮毂110是固定有车轮(未图示)的轮辋中央部、并与车轮一起绕车轴旋转的构件。
77.轮毂110包括圆盘部111、中央部112、驱动轴安装部113、外筒部114、轴承固定环115等。
78.圆盘部111与车轴大致同心地形成,并且形成为大致平板状。
79.在圆盘部111中,在预定的节圆上等间隔地分散配置有例如五个用于紧固车轮的
轮毂螺栓b。
80.中央部112是从圆盘部111的中央部向车宽方向外侧凸出的圆筒状的部分。
81.中央部112插入到设置在轮辋中的凹部(未图示)中,在安装车轮时引导车轮和轮毂110,使得它们可以同心地安装。
82.驱动轴安装部113是从圆盘部11的中央部向车宽方向内侧凸出的圆筒状的部分。
83.在驱动轴安装部113的内径侧形成有与驱动轴的花键轴部(未图示)花键卡合的花键孔部。
84.另外,驱动轴安装部113的主要部分插入到六分量力检测装置200的敏感体210的内径侧。
85.外筒部114是从圆盘部111的外周缘部向车宽方向内侧凸出地形成的圆筒状的部分。外筒部114与车轴大致同心地形成。
86.外筒部114是供轴承120的外圈121固定的部分。
87.为了保持外圈121,在外筒部114的内周面部形成有内径从车宽方向内侧的端部呈梯状增大到与外圈121的宽度大致相同宽度的部分,外圈121嵌装在其内部。
88.以上说明的圆盘部111、中央部112、驱动轴安装部113和外筒部114例如通过对锻造而成的工件实施机械加工而一体地形成。
89.轴承固定环115是通过例如螺纹止挡件而固定在外筒部114的车宽方向内侧端部的圆环状构件。
90.轴承固定环115具有与外筒部114大致相同的外径以及比轴承120的外圈121的外径小的内径,用于保持被组装于外筒部114中的外圈121的车宽方向内侧端部而防止其脱落。
91.轴承120是例如多列深沟球轴承,其将轮毂110支承为可围绕车轴旋转,并包括在内径侧形成有滚道面的外圈121、在外径侧形成有滚道面的内圈122以及组装在它们之间的作为滚动体的钢球123等。
92.感应部130是配置在轮毂110的外筒部114的内径侧且供轴承120的内圈122固定的构件。
93.感应部130包括圆盘部131、外筒部132、轴承固定环133等。
94.圆盘部131形成为与车轴大致同心且大致平板状。在圆盘部131的中央部形成有供轮毂110的驱动轴安装部113插入的圆形开口。
95.后述的六分量力检测装置200的敏感体210的第一凸缘212紧固于圆盘部131的内周缘部。
96.外筒部132是从圆盘部131的外周缘部向车宽方向内侧凸出而成的圆筒状的部分。外筒部132与车轴大致同心地形成。
97.外筒部132是供轴承120的内圈122固定的部分。
98.为了保持内圈122,在外筒部132的外周面部形成有外径从车宽方向外侧的端部呈梯状减小到与内圈122的宽度大致相同宽度的部分,该部分插入内圈122的内径侧。
99.以上说明的圆盘部131以及外筒部132例如通过对锻造而成的工件实施机械加工而一体地形成。
100.轴承固定环133是通过例如螺纹止挡件而固定在外筒部132的车宽方向外侧端部
的圆环状构件。
101.轴承固定环133具有与内圈122的内径大致相同的外径,用于保持被组装于外筒部132中的内圈122的车宽方向外侧端部而防止其脱落。
102.安装部140是固定于壳体60的板状构件。
103.在安装部140的外周缘部,例如在四处形成有安装用凸片141,该安装用凸片141朝着外径侧凸出形成,并具有用于将固定用螺栓紧固到壳体60的螺栓孔。
104.在安装部140的中央部形成有被插入供六分量力检测装置200的敏感体210的圆形开口。敏感体210的第二凸缘213紧固于该圆形开口的内周缘部。
105.六分量力检测装置200包括形成为大致圆筒状且连接感应部130和安装部140的敏感体210、以及设置在该敏感体210中的多个应变仪和包括该应变仪的桥接电路。
106.图3是实施方式的六分量力检测装置200中的敏感体210的沿包括中心轴线的平面剖切并观察的剖面图。
107.如图3所示,敏感体210具有圆筒部211、第一凸缘212、第二凸缘213等。
108.圆筒部211是形成为内径和外径在预定的轴向长度上大致恒定的圆筒状的部分,并且是供后述的多个应变仪粘贴(附着)的部分。圆筒部211与车轴大致同心地配置。
109.第一凸缘212是平板状部分,该平板状部分设置在圆筒部211的一端部,并且相对于圆筒部211分别向外径侧和内径侧凸出。
110.第一凸缘212用于固定感应部130的圆盘部131的内周缘部,并且形成有用于紧固螺栓(未图示)的螺纹孔212a。
111.另外,在圆筒部211和第一凸缘212之间设置有以外径和内径在两者之间居中的方式设定的中间部214。中间部214的外周面形成为直径相对于圆筒部211的外周面呈梯状增大。另外,中间部214的内周面形成为直径相对于圆筒部211的内周面呈梯状减小。
112.在第一凸缘212的外径侧中的第二凸缘213侧的端面和中间部214的外周面之间设置有倒角部(r1)。
113.在中间部214的外径侧中的第二凸缘213侧的端面和圆筒部211的外周面之间设置有倒角部(r2)。
114.在第一凸缘212的内径侧中的第二凸缘213侧的端面和中间部214的内周面之间设置有倒角部(r3)。
115.在中间部214的内径侧中的第二凸缘213侧的端面和圆筒部211的内周面之间设置有倒角部(r4)。
116.在上述各倒角部(r1~r4)中,r1和r3配置成使得敏感体210在轴向上的位置大致一致。
117.另外,r2和r4配置成使得敏感体210在轴向上的位置偏移以使得r2成为第二凸缘213侧。
118.第二凸缘213是设置在圆筒部211的与第一凸缘212相反一侧的端部的平板状部分,并且形成为相对于圆筒部211分别向外径侧和内径侧凸出。
119.第二凸缘213用于固定安装部140的内周缘部,并且形成有供螺栓(未图示)插入的螺栓孔213a。
120.如图2a、图2b所示,安装部140的内周缘部以与第二凸缘213的第一凸缘212侧的面
部抵接的方式配置,并且通过从车宽方向内侧插入第二凸缘213的螺栓孔213a的螺栓紧固。
121.在圆筒部211和第二凸缘213之间设置有以使得外径和内径在两者之间居中的方式设定的中间部215。中间部215的外周面形成为直径相对于圆筒部211的外周面呈梯状增大。另外,中间部215的内周面形成为直径相对于圆筒部211的内周面呈梯状减小。
122.在第二凸缘213的外径侧中的第一凸缘212侧的端面和中间部215的外周面之间设置有倒角部(r5)。
123.在中间部215的外径侧中的第一凸缘212侧的端面和圆筒部211的外周面之间设置有倒角部(r6)。
124.在第二凸缘213的内径侧中的第一凸缘212侧的端面和中间部215的内周面之间设置有倒角部(r7)。
125.在中间部215的内径侧中的第一凸缘212侧的端面和圆筒部211的内周面之间设置有倒角部(r8)。
126.在上述各倒角部(r5~r8)中,r5和r7配置成使得敏感体210在轴向上的位置大致一致。
127.另外,r6和r8配置成使得敏感体210在轴向上的位置偏移以使得r6成为第一凸缘212侧。
128.此外,第一凸缘212的厚度t1和第二凸缘213的厚度t2设定为充分大于圆筒部211的壁厚t0。
129.六分量力检测装置200包括fx检测系、fy检测系、fz检测系、mx检测系、my检测系和mz检测系,这些检测系各自具有包括设置在上述敏感体210的圆筒部211中的应变仪的桥接电路。
130.fx检测系检测作用在敏感体210的圆筒部211上的径向(以下,称为x轴方向)的力fx。
131.fy检测系检测作用在敏感体210的圆筒部211上的与x轴方向正交方向的径向(以下,称为y轴方向)的力fy。
132.fz检测系检测作用在敏感体210的圆筒部211上的轴向(以下,称为z轴方向)的力fz。
133.mx检测系检测作用在敏感体210的圆筒部211上的绕x轴的力矩mx。
134.my检测系检测作用在敏感体210的圆筒部211上的绕y轴的力矩my。
135.mz检测系检测作用在敏感体210的圆筒部211上的绕z轴的力矩mz。
136.上述的fx检测系、fy检测系、fz检测系、mx检测系、my检测系和mz检测系各自具有包括四个应变仪的桥接电路。
137.图4是示意性示出实施方式的六分量力检测装置中的应变仪的配置的立体图。
138.图5a、图5b、图5c是示出实施方式的六分量力检测装置中的力检测系的应变仪的配置以及桥接电路的结构的图。图5a、图5b、图5c分别示出fx检测系、fy检测系和fz检测系。
139.图6a、图6b、图6c是示出实施方式的六分量力检测装置中的力矩检测系的桥接电路的结构的图。图6a、图6b、图6c分别示出mx检测系、my检测系和mz检测系。
140.此外,在图5a、图5b、图5c和图6a、图6b、图6c中,省略示出中间部214、215等。
141.如图4和图5a、图5b、图5c所示,fx检测系具有应变仪221~224。应变仪221~224是
单轴应变仪,并且以其检测方向与圆筒部211的中心轴线方向平行的方式粘贴于圆筒部211的外周面。
142.应变仪221配置在圆筒部211的外周面中的第一凸缘212侧的区域(靠近中间部214的区域)。
143.应变仪222配置在穿过应变仪221且平行于圆筒部211的轴向的直线上,并且配置于圆筒部211的外周面中的第二凸缘213侧的区域(靠近中间部215的区域)。
144.应变仪223配置在相对于应变仪222绕圆筒部211的中心轴线错开180度的位置(与应变仪222相对于圆筒部211的中心轴线对称的位置)。
145.应变仪224配置在相对于应变仪221绕圆筒部211的中心轴线错开180度的位置(与应变仪221相对于圆筒部211的中心轴线对称的位置)。
146.另外,如图5a所示,在fx检测系的桥接电路中,应变仪221~224依次连接成环状,在应变仪222和应变仪223之间以及应变仪221和应变仪224之间分别连接电源的正极、负极,并且将应变仪221和应变仪222之间以及应变仪223和应变仪224之间的电位差作为输出提取。
147.fy检测系具有应变仪231~234。应变仪231~234是单轴应变仪,以其检测方向与圆筒部211的中心轴线方向平行的方式粘贴于圆筒部211的外周面。
148.应变仪231配置成相对于fx检测系的应变仪221绕圆筒部211的中心轴线错开90度。
149.应变仪232配置成相对于fx检测系的应变仪222绕圆筒部211的中心轴线错开90度。
150.应变仪231和应变仪232配置在与圆筒部211的轴向平行的同一直线上。
151.应变仪233配置在相对于应变仪232绕圆筒部211的中心轴线错开180度的位置(与应变仪232相对于圆筒部211的中心轴线对称的位置)。
152.应变仪234配置在相对于应变仪231绕圆筒部211的中心轴线错开180度的位置(与应变仪231相对于圆筒部211的中心轴线对称的位置)。
153.另外,如图5b所示,在fy检测系的桥接电路中,应变仪231~234依次连接成环状,在应变仪232和应变仪233之间以及应变仪231和应变仪234之间分别连接电源的正极、负极,并且将应变仪231和应变仪232之间以及应变仪233和应变仪234之间的电位差作为输出提取。
154.fz检测系具有应变仪241~244。应变仪241~244是单轴应变仪,以其检测方向与圆筒部211的中心轴线方向平行的方式粘贴于圆筒部211的外周面。
155.应变仪241配置在fx检测系的应变仪221和应变仪222之间。
156.应变仪242、243、244相对于应变仪241分别配置在绕圆筒部211的中心轴线的相位错开90度、180度、270度的位置。
157.另外,如图5c所示,在fz检测系的桥接电路中,应变仪241、242、244、243依次连接成环状,在应变仪241和应变仪243之间以及应变仪242和应变仪244之间分别连接电源的正极、负极,并且将应变仪241和应变仪242之间以及应变仪243和应变仪244之间的电位差作为输出提取。
158.如图4和图6a、图6b、图6c所示,mx检测系包括应变仪251~254。应变仪251~254是
单轴应变仪,并且以其检测方向圆筒部211的中心轴线方向平行的方式粘贴于圆筒部211的外周面。
159.应变仪251在圆筒部211的中心轴线方向上与fy检测系的应变仪231相邻配置。
160.应变仪252在圆筒部211的中心轴线方向上与fy检测系的应变仪232相邻配置。
161.应变仪251和应变仪252配置在与圆筒部211的轴向平行的同一直线上。
162.应变仪253配置在相对于应变仪252绕圆筒部211的中心轴线错开180度的位置(与应变仪252相对于圆筒部211的中心轴线对称的位置)。
163.应变仪254配置在相对于应变仪251绕圆筒部211的中心轴线错开180度的位置(与应变仪251相对于圆筒部211的中心轴线对称的位置)。
164.另外,如图6a所示,在mx检测系的桥接电路中,应变仪251、253、252、254依次连接成环状,在应变仪251和应变仪253之间以及应变仪252和应变仪254之间分别连接电源的正极、负极,并且将应变仪251和应变仪254之间以及应变仪253和应变仪252之间的电位差作为输出提取。
165.my检测系包括应变仪261~264。应变仪261~264是单轴应变仪,并且以其检测方向与圆筒部211的中心轴线方向平行的方式粘贴于圆筒部211的外周面。
166.应变仪261在圆筒部211的中心轴线方向上与fx检测系的应变仪221相邻配置。
167.应变仪262在圆筒部211的中心轴线方向上与fx检测系的应变仪222相邻配置。
168.应变仪261和应变仪262配置在与圆筒部211的轴向平行的同一直线上。
169.应变仪263配置在相对于应变仪262绕圆筒部211的中心轴线错开180度的位置(与应变仪262相对于圆筒部211的中心轴线对称的位置)。
170.应变仪264配置在相对于应变仪261绕圆筒部211的中心轴线错开180度的位置(与应变仪261相对于圆筒部211的中心轴线对称的位置)。
171.另外,如图6b所示,在my检测系的桥接电路中,应变仪261、263、262、264依次连接成环状,在应变仪261和应变仪263之间以及应变仪262和应变仪264之间分别连接电源的正极、负极,并且将应变仪261和应变仪264之间以及应变仪263和应变仪262之间的电位差作为输出提取。
172.mz检测系具有应变仪271~274。应变仪271~274是剪切型应变仪,并且以其检测方向成为圆筒部211的周向的方式粘贴于圆筒部211的外周面。
173.应变仪271配置在fz检测系的应变仪241和应变仪242的中间。
174.应变仪272配置在fz检测系的应变仪242和应变仪244的中间。
175.应变仪273、274分别配置在与应变仪272、271相对于圆筒部211的中心轴线对称的位置。
176.另外,如图6c所示,在mz检测系的桥接电路中,应变仪271、273、274、272依次连接成环状,在应变仪271和应变仪273之间以及应变仪272和应变仪274之间分别连接电源的正极、负极,并且将应变仪271和应变仪272之间以及应变仪273和应变仪274之间的电位差作为输出提取。
177.上述各检测系的应变仪配置成,各检测系各自具有的焦点f与车轮(未图示)的中心(车轴上的轮胎宽度的中心)大致一致。
178.在实施方式中,设置有斜率推定单元300,其基于六分量力检测装置200的输出,推
定路面的横向倾斜度(倾斜角)、作用在车身上的侧风等车辆偏航因素。
179.斜率推定单元300可以被输入设置在左右前轮中的六分量力检测装置200的输出,并且与转向控制单元90进行通信。
180.斜率推定单元300的功能和工作将在后面详细说明。
181.检测车辆的行驶速度(车速)的车速传感器310连接于斜率推定单元300。
182.环境识别单元320可通信地连接于斜率推定单元300。
183.环境识别单元320基于各种传感器的输出、路车间通信,车车间通信、地图数据等,识别关于环境的信息,例如自车辆周围的道路形状、各种障碍物等。
184.作为传感器之一,例如,立体相机装置321连接于环境识别单元320。
185.立体相机装置321具有在使拍摄范围面向车辆前方的状态下在车宽方向上隔开配置的一对拍摄装置(相机)以及对由各相机拍摄的图像实施立体图像处理的图像处理部等。
186.环境识别单元320基于立体相机装置321的输出来检测自车辆的车道中横向位置,将其发送至转向控制单元90。
187.转向控制单元90具有进行控制致动器单元80的车道保持辅助控制的功能,以使得车道中横向位置在车道中央部附近的预定范围内。
188.斜率推定单元300具备基于由六分量力检测装置200检测的车轮中心处的六分量力f、m计算轮胎的接地载荷中心位置的功能。
189.以下,说明接地载荷中心位置的计算方法。
190.图7是示意性示出车轮的车轮中心、轮胎接地载荷中心及其作用力的图。
191.首先,如下定义在车轮的车轮中心o处检测的六分量力以及在轮胎接地载荷中心处的六分量力等。
192.·
在车轮中心o处观测到的六分量力:
193.f=(f
x
,f
y
,f
z
),m=(m
x
,m
y
,m
z
)
194.·
在轮胎接地载荷中心处的六分量力:
195.ft=(ft
x
,ft
y
,ft
z
),mt=(mt
x
,mt
y
,mt
z
)
196.·
以车轮中心为原点,设轮胎接地载荷中心的位置向量为r=(x,y,z)。
197.若假设除了轮胎接地面以外,没有外力起作用,则成为如式1所示。
198.f=ft...(式1)
199.另外,根据力矩的定义,下式2成立。
200.m=r
×
ft mt...(式2)
201.在此,对未知数和已知数进行整理。
202.·
若假设外倾角在足够小的范围内,则z=
‑
r(r是轮胎滚动半径且是正值)。
203.·
将成为mt
x
=mt
y
=0的点定义为接地载荷中心。
204.因而,未知数是x、y、mt
z
这三个。
205.若汇总式2的未知数,则如式3那样求出轮胎接地载荷中心x、y以及该点处的mt
z
。
206.公式1
[0207][0208]
接下来,说明实施方式的车辆偏航因素推定装置的工作。
[0209]
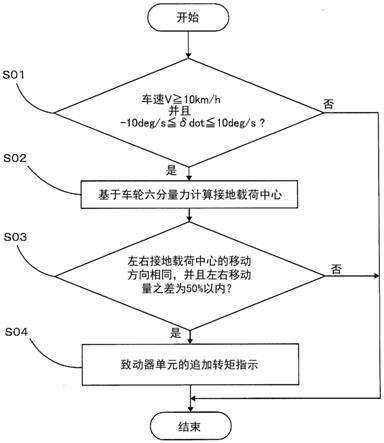
图8是示出实施方式的车辆偏航因素推定装置及转向装置的工作的流程图。
[0210]
以下,按顺序说明每个步骤。
[0211]
<步骤s01:车速及转向速度的判断>
[0212]
斜率推定单元300基于来自转向控制单元90和车速传感器310的信息,获取关于车速v及转向速度(转向角的时间微分值)δdot的信息。
[0213]
作为进行斜率推定的前提条件,斜率推定单元300判定车速v是否为预定值(例如,10km/h)以上以及转向速度δdot是否为
‑
10deg/s以上且10deg/s以下。
[0214]
如果满足上述条件,则处理进入步骤s02,在其他情况下,结束一系列处理(返回)。
[0215]
<步骤s02:接地载荷中心的计算>
[0216]
斜率推定单元300通过上述方法,基于六分量力检测装置200的输出,计算左右前轮的轮胎的接地载荷中心的坐标位置x、y。
[0217]
此外,对六分量力检测装置200的输出,实施例如截止频率为5hz的低通滤波处理。
[0218]
通过执行该低通滤波处理,可以减少路面上的接缝、粗糙度等不平整带来的影响。
[0219]
之后,进入步骤s03。
[0220]
<步骤s03:左右接地载荷中心位移的移动方向/左右两侧之差的判定>
[0221]
斜率推定单元300对在步骤s02中计算出的左右前轮的接地载荷中心的横向(车宽方向)的位移进行比较。
[0222]
如果左右接地载荷中心的移动方向相同,并且移动量的左右两侧之差为50%以下,则进入步骤s04,在其他情况下,结束一系列处理(返回)。
[0223]
在此,满足上述条件时的接地载荷中心的横向位移表示路面的倾斜角度、侧风等车辆偏航因素的大小及方向。
[0224]
<步骤s04:致动器单元追加转矩的指示>
[0225]
斜率推定单元300将在步骤s02中计算出的左右前轮的接地载荷中心的横向位移量的平均值传送至转向控制单元90。
[0226]
转向控制单元90基于接地载荷中心的横向位移,对致动器单元80指示在通过正常控制指示的转矩中进一步追加的转向转矩(用于防止车辆偏航的转矩)。
[0227]
图9是示出实施方式的转向装置中的接地载荷中心的横向位移和追加的转向转矩之间的相关关系的一例的图。
[0228]
在接地载荷中心的横向位移的绝对值等于或大于预定值的区域中,所追加的转向转矩与接地载荷中心的横向位移相关(例如成比例)。
[0229]
另外,在接地载荷中心的横向位移的绝对值小于预定值的区域中,不追加转向转矩。
[0230]
这是为了,通过频繁地切换经控制所追加的转向转矩的正负,即向右转还是向左
转(转向转矩的施加方向),防止在手动驾驶时驾驶者经方向盘10感到对转向力的不适,或者防止在自动驾驶时方向盘10以碎步左右转动而使驾驶者感到不安。
[0231]
之后,结束一系列处理(返回)。
[0232]
如上所说明,根据本实施方式,可以获得以下效果。
[0233]
(1)通过基于检测车轮作用力的六分量力检测装置200的输出来计算接地载荷中心的横向位移,能够在早期阶段高精度地检测例如因车身弹簧的上部行为等而难以检测的微小的路面横向坡度、侧风等车辆偏航因素。
[0234]
(2)通过仅在接地载荷中心的横向位移在相同方向上时进行车辆偏航因素的推定,能够预防由于车身的弹跳等引起的接地载荷中心的位移而错误地推定车辆偏航因素。
[0235]
(3)通过仅在左右车轮的接地载荷中心的横向位移量的左右差在预定范围内时进行车辆偏航因素的推定,能够防止在接地载荷中心的位移的左右两侧差大的车辙道路等中车辆偏航因素的推定精度降低。
[0236]
(4)通过根据基于车轮的接地载荷中心的横向位移推定的车辆偏航因素而使致动器单元80产生追加的转向转矩,能够适当地防止车辆的偏航而提高直线行驶性、平缓弯道的线性追踪性。
[0237]
(变形例)
[0238]
本发明不限于以上说明的实施方式,可以进行各种变形和变更,这些也在本发明的技术范围内。
[0239]
(1)车辆偏航因素推定装置、转向装置以及车辆的结构不限于上述实施方式,可以适当变更。
[0240]
(2)用于检测车轮作用力的传感器(实施方式中为六分量力检测装置200)的结构是一个例子,可以适当地变更敏感体的构造、应变仪的配置等。
[0241]
(3)在实施方式中,车辆偏航因素推定装置的输出用于控制转向装置,但也可以将车辆偏航因素的推定结果用于其他用途。
[0242]
例如,可以基于车辆偏航因素的推定值,控制具有可使悬架几何形状在行驶过程中改变的可变机构的悬架装置、控制左右车轮之间的制驱动力之差的制驱动力控制装置,防止车辆偏航。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。