车辆用装置
1.相关申请的交叉引用
2.本技术主张于2019年3月13日申请的日本技术编号2019-045892的优先权,并在此引用其全部内容。
技术领域
3.本公开涉及车辆用装置。
背景技术:
4.一般而言,在计算机系统中,考虑能够通过提高cpu的动作时钟来实现高性能化。此时,例如通过使用专利文献1所记载那样的动作时钟根据负载变动的cpu,能够根据需要暂时使处理能力提高,能够在取得消耗电力与处理能力的平衡的同时实现整体的高性能化。以下,为了方便,将动作时钟在动作中变动的cpu称为变动型cpu。
5.专利文献1:日本特表2007-535721号公报
6.然而,车辆用装置也考虑为由cpu控制的计算机系统之一。但是,在车辆用装置的情况下,与所谓的个人计算机等通用的计算机系统不同,若采用变动型cpu则产生以下那样的问题。
7.即,在车辆例如设置有无线电调谐器、gnss模块、或者wifi、bluetooth(注册商标)等对噪声敏感的功能部。另外,在车辆设置有多个车辆用装置。因此,为了防止噪声对功能部、其它的车辆用装置给予影响,分别对各车辆用装置要求严格的噪声设计。
8.而且,在假设采用变动型cpu的情况下,若在动作中动作时钟变动则随之噪声成分也变动,所以需要对变动型cpu能够采取的所有动作时钟进行噪声设计。但是,若考虑验证的工时、费用,则现实难以进行假定了所有动作时钟的理想的噪声设计。而且,若不进行这样的理想的噪声设计,则有引起声音的劣化、车辆的位置偏移、或者与其它的车辆用装置的通信错误等的担心。
技术实现要素:
9.本公开是鉴于以上说明的问题而完成的,其目的在于提供能够不给予噪声影响而实现高性能化的车辆用装置。
10.实施方式的车辆用装置具备:cpu,能够设定以额定的动作时钟进行动作的额定状态、和与额定的动作时钟相比能够高速地进行动作的高速状态;以及设定部,将cpu设定为额定状态或者高速状态的任意一个,设定部在从起动开始的规定期间将cpu设定为高速状态,并且在经过了规定期间之后将cpu设定为额定状态。
11.根据这样的构成,考虑在起动时功能部、其它的车辆用装置也在起动中,所以能够不给予噪声影响而实现车辆用装置的高性能化。另外,若设定为额定状态则动作时钟不变动,所以能够防止噪声对其它的功能部、周边电路或者其它的装置造成影响。
附图说明
12.通过参照附图的下述的详细描述,本公开的上述目的以及其它的目的、特征、优点变得更加明确。该附图为:
13.图1是示意地表示第一实施方式所提供的车辆用装置的电气构成例的图。
14.图2是示意地表示车辆用装置的软件构成例的图。
15.图3是表示起动处理的流程的图。
16.图4是对车辆用装置和cpu的状态进行对比表示的图。
17.图5是对第二实施方式所提供的车辆用装置和cpu的状态进行对比表示的图。
18.图6是对第三实施方式所提供的车辆用装置和cpu的状态进行对比表示的图其一。
19.图7是对车辆用装置和cpu的状态进行对比表示的图其二。
20.图8是对车辆用装置和cpu的状态进行对比表示的图其三。
具体实施方式
21.以下,参照附图对多个实施方式进行说明。此外,对在各实施方式中基本上相同的构成标注相同的附图标记进行说明。
22.(第一实施方式)
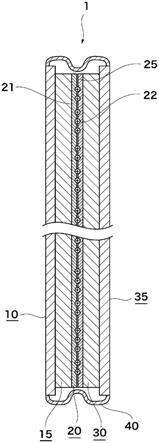
23.以下,参照图1~图4对第一实施方式进行说明。首先,参照图1对车辆用装置1的电气构成进行说明。
24.如图1所示,本实施方式的车辆用装置1在本实施方式中在一个硬件2上设置一个cpu3。该cpu3内置多个内核3a,在本实施方式中内置八个内核3a。如后述的图2所示,各内核3a适当地分配给在cpu3上动作的操作系统30、40。此外,内核3a的数目为一个例子,并不限定于此。
25.cpu3能够设定以额定的动作时钟进行动作的额定状态、和与额定的动作时钟相比能够高速地进行动作的高速状态。而且,在cpu3设置有由软件实现的设定部3b。该设定部3b将cpu3设定为额定状态或者高速状态的任意一个。
26.cpu3在被设定为额定状态的情况下,仅以额定的动作时钟进行动作。另一方面,cpu3在被设定为高速状态的情况下,在使动作时钟根据负载在额定的动作时钟与被允许的最大时钟之间变动的同时进行动作。此时,cpu3构成为动作时钟根据负载自动地变动。
27.此外,即使是高速状态根据负载也有以额定的动作时钟进行动作的情况,所以并不一定意味着高速状态=动作时钟变动的状态。另外,在本实施方式中,采用根据负载选择在额定时钟与最大时钟之间预先以多个阶段设定的动作时钟中任意一个动作时钟的构成的cpu3。但是,也能够使用能够以额定时钟与最大时钟之间的任意的动作时钟进行动作的cpu。
28.另外,在硬件2上设置有无线电调谐器4、影像输入部5、global navigation satellite system:全球卫星导航系统模块6(以下,称为gnss模块6)、通信接口7(以下,称为通信if7)、电视调谐器8、data communication module:数据通信模块8(以下,称为dcm9)、声音输出部10、影像输出部11、存储部12、controller area network:控制器局域网接口13(以下,称为canif13)等。
29.但是,车辆用装置1并不需要一定具备图1所示的所有构成,只要具备需要的构成
即可。以下,为了方便,也将它们称为周边电路。另外,这些周边电路构成由cpu3控制的功能部。
30.无线电调谐器4通过利用天线接收从广播电台发送的电波,能够进行无线电广播的视听。
31.影像输入部5输入有由设置于车辆的后方并拍摄后方的后照相机14、设置于车辆的车门并拍摄侧方以及后方的车门照相机15拍摄到的影像。影像输入部5进行将被输入的影像转换为能够在cpu3等进行处理的格式等处理。此外,照相机的数目、功能是一个例子,并不限定于此,也能够构成为设置代替所谓的后视镜的照相机或者构成为不设置车门照相机15。
32.gnss模块6从全球定位卫星系统的人工卫星接收信号。该gnss模块6例如为global positioning system:全球定位系统、global navigation satellite system:全球卫星导航系统、galileo:伽利略、准天顶卫星系统、beidou navigation satellite system:北斗卫星导航系统等各种方式中与成为对象的方式对应的规格。
33.通信if7例如是usb、bluetooth、wifi等在与存储介质、外部装置之间进行数据的交换的接口。电视调谐器8通过利用天线接收从广播电台发送的电波,能够使用户进行电视节目的视听。
34.dcm9是车辆用的数据通信装置,在与设置于车辆的外部的中心之间、或者在与设置于车辆的其它的electronic control unit:电子控制单元16(以下,称为ecu16)之间进行通信。此外,虽然车辆用装置1也能够认为是ecu16之一,但这里为了简化说明而区分两者。
35.该dcm9例如经由网络将从ecu16收集到的车辆信息送至外部的中心,或者接收来自中心的信息并报告给用户,或者在万一产生了事故的情况下自动地与中心连接并传递产生了事故的位置、时刻。
36.声音输出部10将来自无线电广播、电视广播或者导航功能等的声音输出给扬声器。
37.影像输出部11对由后照相机14、车门照相机15拍摄到的影像、电视广播的影像、或者从外部媒体读入的影像等进行显示输出。另外,影像输出部11也进行车辆用装置1的动作状态、获取的车辆信息等的显示输出。
38.本实施方式的情况下,车辆用装置1例如构成为对速度计、警告灯等进行全图形显示。而且,从影像输出部11输出的速度计的图像、警告灯的图像例如显示于配置在驾驶席的前方的作为显示部的仪表显示器17。另外,导航画面例如显示于配置在车辆的中央附近的作为显示部的中心显示器18。此外,显示部的数目、配置是一个例子,并不限定于此。
39.存储部12例如由半导体存储器构成,存储车辆用装置1的动作所需要的各种数据、程序。此外,虽然详细后述,但在车辆用装置1的起动时从存储部12读出起动加载程序并执行,此时,设定cpu3的状态。换句话说,通过在cpu3执行存储于存储部12的起动加载程序,以软件实现设定部3b。
40.canif13是经由can总线19在与各种ecu16之间进行数据的交换的接口。该canif13构成为在cpu3未起动的状态下也进行动作,若经由can总线19输入起动信号(s),则使cpu3起动。此外,can总线19本来被设计为车辆用,抗噪性较高,所以从本实施方式所说的受到噪
声影响的功能部、周边电路排除。
41.起动信号(s)例如在检测到来自遥控钥匙的开锁操作、车门的打开、附件开关的接通、点火开关的接通、电源开关的接通等时,从检测到这些的ecu16对于车辆用装置1发送。此外,发送起动信号(s)的重要因素并不限定于这些。
42.接下来,参照图2对车辆用装置1的软件构成进行说明。如图2所示,在车辆用装置1中,管理程序20在硬件2上换句话说在cpu3上进行动作。该管理程序20是用于构建虚拟化环境的软件,能够采用公知的软件。因此,这里省略管理程序20的详细说明。此外,管理程序20例如也可以被安装为os的功能的一部分。以下,为了方便,也将管理程序20称为hv。
43.在该管理程序20上,多个操作系统这里是操作系统30(以下,称为os30)和操作系统40(以下,称为os40)两个操作系统进行动作。os30是所谓的real time os:实时os,通过执行各种程序,来实现主要要求实时性能的功能。
44.以下,为了方便,将在os30及os40上执行的各种程序总称为应用程序。另外,对于个别的应用程序而言,例如如后述那样也称为影像应用40b等。
45.在os30中,例如执行用于从由gnss模块6接收到的信息获取当前位置、时刻的gnss应用30a、在仪表显示器17显示速度计的图像的仪表应用30b、在中心显示器18显示时刻的时刻应用30c等。而且,通过各应用程序和与其对应的周边电路实现各个功能部。此外,应用程序的数目、种类是一个例子,并不限定于此。以下,为了方便,也将os30称为real time os:实时os(以下,称为rtos)。
46.os40实现与os30相比不要求实时性的功能、所谓的多媒体系统的功能。通过该os40,提供进行信息的提供和娱乐的提供的所谓的车载信息娱乐功能。以下,为了方便,也将os40称为multi media os:多媒体os(以下,称为mmos)。
47.在该os40中,例如执行提供人机接口(以下,称为hmi)的hmi应用40a、显示输入到影像输入部5的影像的影像应用40b、经由通信if7与存储介质、外部的装置进行通信的通信应用40c、对由无线电调谐器4接收到的无线电广播进行视听的无线电应用40d、对由电视调谐器8接收到的电视广播进行视听的电视应用40e、控制dcm9的dcm应用40f、提供导航功能的导航应用40g等。而且,通过各应用程序和与其对应的周边电路实现各个功能部。此外,应用程序的数目、种类是一个例子,并不限定于此。
48.这些管理程序20与os30、os40之间、及os30与os40之间构成为能够根据规定的协议进行通信。另外,从os30、os40向硬件2的访问基本上经由管理程序20进行。
49.接下来,对上述的构成的作用进行说明。
50.如上述那样,若为一般的计算机系统则考虑能够通过提高动作时钟来实现高性能化。此时,若简单地提高动作时钟则有成为超规格的可能性,所以考虑若使用能够在动作中使动作时钟变动的变动型cpu,则能够在取得消耗电力与处理能力的平衡的同时实现整体的高性能化。
51.但是,在车辆用装置1的情况下,如上述那样具备无线电调谐器4、gnss模块6、或者wifi、bluetooth那样的通信if7等对噪声比较敏感的功能部。而且,车辆用装置1要求精确的噪声设计以便不对这些功能部造成影响。这是因为若在cpu3的动作时产生的噪声影响功能部,则有引起声音的劣化、车辆的位置偏移、或者与其它的车辆用装置1的通信错误等误动作、功能部的性能劣化的担心。
52.但是,在变动型cpu中,若在动作中动作时钟变动则随之噪声成分也变动。而且,若考虑验证的工时、费用,则现实上难以对变动型cpu能够采取的所有动作时钟进行噪声设计。
53.因此,以往,通过不使动作时钟变动,能够容易地进行噪声设计。这也起因于如下的车辆用装置1的性质,即,因为能够在某种程度假定在车辆用装置1的情况执行的os、应用程序,所以预先采用对这些程序的动作足够的性能的cpu3,与所谓的个人计算机那样的通用的一般的计算机系统相比不容易产生在动作中使动作时钟变动的状况。
54.换句话说,在车辆用装置1的情况下,几乎没有使用变动型cpu的优点,相反,由于使用变动型cpu而存在噪声设计困难这样的缺点。
55.另一方面,车辆用装置1如上述那样显示速度计图像、警告灯等。这些显示是不仅在行驶中需要,在开始行驶时也需要的信息,所以需要迅速地进行显示。另外,例如如美国中的kid's transportation法(以下,称为kt法)那样,也存在规定包含到显示后照相机14的图像为止的时间等的后方视觉确认要件的法规。
56.因此,较强地要求车辆用装置1的高性能化。但是,如上述那样,不对功能部、ecu16造成影响是必须的条件。因此,在本实施方式中,如以下那样不对功能部、ecu16给予噪声影响,而实现车辆用装置1的高性能化这里是指实现从车辆用装置1起动到能够进行动作为止的时间的缩短化。此外,不给予噪声影响并不指完全不产生噪声,而是指能够通过噪声设计进行应对。
57.首先,参照图3对起动时的处理的流程进行说明。此外,虽然cpu3的状态的设定由设定部3b进行,但为了简化说明,以下以车辆用装置1为主体进行说明。
58.车辆用装置1在图3所示的起动处理中,若被输入起动信号(s)而起动,则在步骤s1中将cpu3设定为高速状态。该设定在执行从存储部12读出的起动加载程序时进行。换句话说,cpu3在起动后迅速移至高速状态。
59.接着,车辆用装置1在步骤s2中判断是否从起动开始经过了规定期间。后述该规定期间。然后,车辆用装置1在判断为未经过规定期间的情况下,在步骤s2为否,不进行cpu3的设定变更而进行待机。此外,这里对cpu3的设定变更进行待机,起动处理本身由高速状态的cpu3执行。
60.另一方面,车辆用装置1在判断为经过了规定期间的情况下,步骤s2为是,在步骤s3中将cpu3设定为额定状态。然后,车辆用装置1结束cpu3的设定处理。换句话说,车辆用装置1在起动时,进行在从起动开始的规定期间将cpu3设定为高速状态,并且若经过规定期间则将cpu3设定为额定状态的处理。
61.接下来,对上述的规定期间的详细进行说明。车辆用装置1在起动时其状态如图4的将横轴作为时间轴的时序图所示那样变化。车辆用装置1若起动则进行os的启动,之后进行周边电路的初始化,其后使需要高速起动的功能优先,并且也执行不需要高速起动的功能。此外,也有部分重复地进行os的启动、周边电路的初始化以及各功能的执行的情况。
62.这里,需要高速起动的功能是指在行驶中需要的功能、以及提供在开始行驶之前应该通知的信息的功能,在本实施方式中来说对应于由车门照相机15、后照相机14拍摄到的影像的显示、速度计图像的显示、警告灯的图像的显示等。若对应的周边电路的初始化完成则随时执行这些需要高速起动的功能。另外,若鉴于用户的便利性,则虽然省略图示但也
能够考虑除霜功能、空调功能也包含于需要高速起动的功能。
63.另一方面,不需要高速起动的功能是指需要高速起动的功能以外的功能,在本实施方式中来说,对应于无线电广播、电视广播的视听等。另外,作为不需要高速起动的功能,也包含在起动时不自动地执行的功能、通过用户的操作开始的功能等。
64.这样,假定在车辆用装置1的起动时需要执行os的启动、各种初始化的处理,与初始化完成之后的所谓的通常状态相比负载增大。因此,为了实现车辆用装置1的高性能化,起动时间的缩短化的优先级提高。
65.另外,虽然在刚起动之后需要迅速地执行一部分的功能即需要高速起动的功能,但对于不需要高速起动的功能来说只要在经过了恒定时间之后执行即可的情况较多。并且,考虑在车辆用装置1起动的定时,其它的ecu16也在起动中。
66.因此,着眼于这些点,在车辆用装置1的起动时,将cpu3设定为以高速的动作时钟进行动作的高速状态。由此,能够使起动时的处理能力提高,能够兼得车辆用装置1的起动时间的缩短化也就是高性能化的实现、和成为不给予由动作时钟变动所引起的噪声影响的状态。
67.然而,在本实施方式中,作为不给予噪声影响的状态,不仅包含如字面那样噪声不对功能部的周边电路等造成影响的状态,也包含即使有噪声影响但该噪声不对车辆用设备的性能、可靠性造成直接的影响的状态。
68.例如,即使噪声影响无线电调谐器4而音质劣化,但若不输出声音,则能够认为未受到噪声影响。或者,即使噪声影响gnss模块6而不能够确定当前位置,但若不进行车辆的当前位置的显示,则也能够认为未受到噪声影响。
69.而且,考虑到能够认为未受到噪声影响的期间越长,处理能力提高的高速状态的期间也越长,越能够使车辆用装置1高性能化。
70.因此,若假设车辆用装置1在图4所示的时刻t0起动,则在到在时刻t1开始hmi的显示为止的期间,将cpu3设定为高速状态。换句话说,车辆用装置1在到在视觉或者听觉上对用户开始信息的提供为止的期间,将cpu3设定为高速状态。
71.由此,能够更长地维持高速状态,能够使起动时间进一步缩短化。另外,hmi是在cpu3上进行动作的应用程序,并且构成由cpu3控制的功能部。因此,到开始hmi的显示为止的期间也相当于从起动到在cpu3上进行动作的特定的应用程序被执行为止的期间、以及从起动到开始特定的功能部的动作为止的期间。此外,特定的能够认为是对噪声敏感的程序或者功能部。
72.其后,车辆用装置1将cpu3设定为额定状态。由此,其以后cpu3以额定时钟进行动作,所以排除伴随动作时钟的变动的噪声影响。
73.根据以上说明的车辆用装置1,能够得到以下那样的效果。
74.车辆用装置1具备:cpu3,能够设定以额定的动作时钟进行动作的额定状态、和与额定的动作时钟相比能够高速地进行动作的高速状态;以及设定部3b,将cpu3设定为额定状态或者高速状态的任意一个,设定部3b在从起动开始的规定期间将cpu3设定为高速状态,并且在经过规定期间之后将cpu3设定为额定状态。
75.根据这样的构成,能够在认为负载比较高的起动时使cpu3的处理能力提高,能够实现车辆用装置1的高性能化。而且,考虑在起动时各功能部、其它的车辆用装置1也在起动
中,所以能够防止噪声所引起的误动作、性能劣化。
76.因此,能够不给予噪声影响而实现高性能化。换句话说,通过在高速状态下使噪声耐性较高的功能动作,能够排除噪声对误动作、性能劣化的影响。
77.另外,由于噪声设计、评价工时能够与以往不改变地使性能提高,所以能够兼得高性能化和可靠性。并且,若车辆用装置1的起动较快,则例如用户乘车后立刻开始画面显示,能够以对于用户来说容易理解的方式展示高性能。
78.另外,车辆用装置1在从起动开始到开始提供人机接口为止的期间,将cpu3设定为高速状态。换句话说,车辆用装置1在从起动开始到作为在cpu3上进行动作的特定的应用程序的hmi被执行为止的期间,将cpu3设定为高速状态。换句话说,车辆用装置1在从起动开始到开始作为特定的功能部的hmi的动作为止的期间,将cpu3设定为高速状态。
79.由此,能够将即使实际有噪声影响但该噪声不对车辆用设备的性能、可靠性造成直接的影响的期间作为规定期间,并在该规定期间中使cpu3成为高速状态。因此,能够更长地维持高速状态,能够实现起动时的处理的迅速化即起动时间的进一步的缩短化。
80.在本实施方式中,例示了hmi应用40a作为特定的应用程序,例示了hmi作为特定的功能部,但也能够将其它的应用程序、功能部作为特定的应用程序或者特定的功能部。
81.(第二实施方式)
82.以下,参照图5对第二实施方式进行说明。在第二实施方式中,对与第一实施方式不同的规定期间的例子进行说明。此外,车辆用装置1的构成与第一实施方式相同,所以也参照图1以及图2进行说明。
83.在第二实施方式中,车辆用装置1在作为规定期间的从起动开始到在cpu3上进行动作的os启动为止的期间,将cpu3设定为高速状态。此时,如图2所示,管理程序20、os30以及os40在车辆用装置1上进行动作。如图4所示,这些管理程序20、os30以及os40构成为在os的启动时,首先管理程序20启动,接下来os30启动,最后os40启动。
84.该情况下,如图4的cpu3的状态其一所示,车辆用装置1换句话说设定部3b能够将从起动的时刻t0到os30启动的时刻t10为止的期间作为规定期间,将cpu3设定为高速状态。如上述那样,os30负责gnss模块6的处理,由os40的导航应用40g利用该gnss模块6。因此,若os30启动则使cpu3成为额定状态,而使gnss模块6成为不受到噪声影响的状态,从而即使os40启动后立刻利用gnss模块6也能够不产生问题,能够防止误动作、性能劣化。
85.另外,如图4的cpu3的状态其二所示,车辆用装置1能够将从起动的时刻t0到os40启动的时刻t11为止的期间作为规定期间,将cpu3设定为高速状态。如上述那样,os40提供无线电广播、电视广播,考虑通过用户的操作开始这些功能。因此,通过在os40启动的时刻使cpu3成为额定状态,能够使无线电模块、电视模块成为不受到噪声影响的状态,无论用户何时进行操作都能够不产生问题,能够防止误动作、性能劣化。
86.或者,如图4的cpu3的状态其三所示,车辆用装置1能够将从起动的时刻t0开始到管理程序20启动的时刻t12为止的期间作为规定期间,将cpu3设定为高速状态。管理程序20提供用于对来自os30、os40的访问进行中介的虚拟设备。因此,也存在在管理程序20启动的时刻初始化完成的周边电路。另外,也有管理程序20本身访问周边电路的情况。
87.因此,通过在管理程序20启动的时刻使cpu3成为额定状态,能够使管理程序20访问的周边电路成为不受到噪声影响的状态,能够防止误动作、性能劣化。此外,在管理程序
20例如被安装为os30的功能的一部分的情况下,也能够在到管理程序20的应用程序被执行为止的期间、或者在到实现管理程序20的功能部被执行为止的期间,使cpu3成为高速状态。
88.(第三实施方式)
89.以下,参照图6~图8对第三实施方式进行说明。在第三实施方式中,对与第一实施方式以及第二实施方式不同的规定期间的例子进行说明。此外,车辆用装置1的构成与第一实施方式相同,所以也参照图1以及图2进行说明。
90.如图6所示,车辆用装置1在作为规定期间的从起动到周边电路的初始化完成为止的期间,将cpu3设定为高速状态。由此,能够迅速地将在os30、os40利用的周边电路初始化,os30、oab能够在起动后迅速执行各功能。
91.此时,如图7所示,车辆用装置1能够在到特定的周边电路的初始化完成为止的期间,将cpu3设定为高速状态。该情况下,作为特定的周边电路,例如能够将由需要高速起动的功能利用的周边电路作为对象。由此,在执行需要高速起动的功能的时刻cpu3成为额定状态,所以能够防止对需要高速起动的功能给予噪声影响。
92.或者,如图8所示,车辆用装置1能够在到os的启动中例如os30侧的特定的周边电路的初始化完成为止的期间,将cpu3设定为高速状态。例如,作为需要高速起动的功能的后照相机14的影像能够构成为在cpu3快捷地进行显示。该情况下,若影像输入部5、影像输出部11的初始化完成,则即使不等待os30、os40的启动的完成也进行显示,从而能够进行更迅速的显示。
93.虽然本公开依照实施例进行了描述,但应该理解本公开并不限定于该实施例、结构。本公开也包含各种变形例、同等范围内的变形。除此之外,各种组合、方式、以及在它们中包含仅一要素、其以上、或者其以下的其它组合、方式也包含在本公开的范畴、思想范围内。
94.在各实施方式中示出了额定时钟为一个的例子,但也能够采用有多个额定时钟,并对它们进行切换的构成。该情况下,切换的动作时钟已知,所以若预先进行对各动作时钟的噪声设计则能够防止噪声给予影响。
95.也可以由通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器以及存储器来提供的专用计算机实现本公开所记载的控制部及其方法。或者,也可以利用通过由一个以上的专用硬件逻辑电路构成处理器而提供的专用计算机实现本公开所记载的控制部及其方法。或者,也可以通过由被编程为执行一个或者多个功能的处理器以及存储器与通过一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机实现本公开所记载的控制部及其方法。另外,计算机程序也可以作为由计算机执行的指令,存储于计算机能够读取的非瞬态有形记录介质。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。