1.本发明涉及链式输送机以及具备链式输送机的焚烧设施、熔炼设施。
背景技术:
2.在焚烧设施中,为了输送主灰和飞灰、炉渣等而使用具备刮板(flight)(也称为scraper)的链式输送机。在链式输送机中,当链条因磨损而变细时链条会发生伸长。当左右链条产生伸长之差(即链条的单侧伸长)时容易脱轨。另外,为了尽量抑制左右链条的伸长之差发展,期望使对链式输送机投入的投入物(输送物)相对于左右链条对称。然而,由于前置设备及后置设备的配置上的制约和输送物的特性变化等,实际上很难达到对称的状态。
3.为了防止发生脱轨,以往,当运转停止时会在所有刮板之间重复进行作业人员(人)使用凸面卷尺(量度器)在左右链条上分别测定相邻刮板之间的间距的这个作业(测定全部刮板之间的左右间距),之后,人们基于测定结果研究左右链条的应该替换的部分,并在该部分实施左右链条的替换。即,链条的替换部位的判断基于运转停止时的左右链条的间距的测定结果。另外,是否实施左右链条的替换的判断基于人们的监视及判断,即基于由处于尾部的松紧装置对链条进行的张拉调整是否能够防止脱轨。
4.因此,在运转过程中,难以检验链条在链式输送机的运转过程中发生了急剧伸长时的状况、和链条的张拉的调整结果是否适当。另外,关于因链条的单侧伸长而导致的链条脱轨则成为不安状况下的操作。进一步地,当以设施的少人化、无人化运转为目标时,期望减轻人们的监视负担并能实现不依赖人们的技术的替换时期的判断。
5.在日本特开2016
‑
20244号公报中公开了一种装置,在具备将输送物放置于其上来输送的板状裙板(apron pan)的链式输送机中,在运转过程中测定到裙板为止的距离,并检测因与输送物(落下物)的碰撞而导致的裙板变形(弯曲)。然而,在运转过程中检测左右链条的伸长之差的技术是未知的。
技术实现要素:
6.本发明是考虑到以上的点而做出的。本发明的目的在于,提供一种能够在运转过程中检测左右链条的伸长之差的链式输送机。
7.本发明的第1方式的链式输送机具备:
8.驱动部及从动部;
9.左右一对链条,其架设于所述驱动部与所述从动部之间;
10.多个刮板,其沿着左右一对的所述链条并列配置,并固定于左右一对的所述链条之间;
11.左右一对距离传感器,其朝向所述刮板通过的位置;和
12.运算部,其在运转过程中基于左右一对的所述距离传感器的测定结果而在左右两个位置处计算相邻刮板之间的距离,并根据计算结果来计算左右一对的所述链条的伸长之差。
13.根据这种方式,左右一对距离传感器朝向刮板通过的位置,运算部在运转过程中基于左右一对距离传感器的测定结果而在左右两个位置处计算相邻刮板之间的距离,并根据计算结果来计算左右一对链条的伸长之差。由此,能够在运转过程中检测左右链条的伸长之差。
14.关于本发明的第2方式的链式输送机,在第1方式的链式输送机中,所述距离传感器是超声波式距离传感器或激光式距离传感器。
15.关于本发明的第3方式的链式输送机,在第1或2方式的链式输送机中,还具备在所述伸长之差超过预先确定的阈值的情况下发出警报的警报部。
16.关于本发明的第4方式的链式输送机,在第1至3的任一方式的链式输送机中,还具备基于所述伸长之差的时间变化来预测左右一对的所述链条的替换时期的预测部。
17.关于本发明的第5方式的链式输送机,在第1至4的任一方式的链式输送机中,左右一对的所述距离传感器相较于输送物的入口在所述从动部侧朝向所述刮板通过的位置。
18.根据这种方式,从左右一对距离传感器前通过的刮板相较于输送物的入口位于从动部侧,由此,由于难以直接碰到输送物,所以能够减少测定误差。另外,在输送物的入口通常设置有刮板导轨,刮板在即将从左右一对距离传感器前通过时在刮板导轨上移动,由此,能够有助于清扫刮板的测定面。另外,通过左右一对距离传感器位于从动部附近,能够基于左右一对距离传感器的测定结果来检测由设置于从动部的松紧装置获得的链条张拉因链条的磨损进展而降低并导致链条重力方向上的松弛度变大的状态。
19.关于本发明的第6方式的链式输送机,在第1至5的任一方式的链式输送机中,还具备基于左右一对的所述距离传感器的测定结果来检测左右一对的所述链条的松弛度的松弛度检测部。
20.关于本发明的第7方式的链式输送机,在第6方式的链式输送机中,还具备在所述松弛度超过预先确定的第2阈值的情况下发出警报的第2警报部。
21.关于本发明的第8方式的链式输送机,在第6或7方式的链式输送机中,还具备基于所述松弛度的时间变化来预测左右一对的所述链条的张拉的调整时期的第2预测部。
22.关于本发明的第9方式的链式输送机,在第1至8的任一方式的链式输送机中,还具备伸长率运算部,其在运转过程中基于左右一对的所述距离传感器的测定结果而在左右两个位置处计算相邻刮板之间的距离,并根据计算结果来计算左右一对的所述链条的相对于设计值的伸长率。
23.关于本发明的第10方式的链式输送机,在第9方式的链式输送机中,还具备在所述伸长率超过预先确定的第3阈值的情况下发出警报的第3警报部。
24.关于本发明的第11方式的链式输送机,在第9或10方式的链式输送机中,还具备基于所述伸长率的时间变化来预测左右一对的所述链条的新品更换时期的第3预测部。
25.本发明的第12方式的链式输送机具备:
26.驱动部及从动部;
27.链条,其架设于所述驱动部与所述从动部之间;
28.多个刮板,其沿着所述链条并列配置,并固定于所述链条上;
29.左右一对距离传感器,其朝向所述刮板通过的位置;和
30.伸长率运算部,其在运转过程中基于左右一对的所述距离传感器的测定结果而在
左右两个位置处计算相邻刮板之间的距离,并根据计算结果来计算所述链条的相对于设计值的伸长率。
31.本发明的第13方式的焚烧设施具备第1至12的任一方式的链式输送机。
32.本发明的第14方式的熔炼设施具备第1至12的任一方式的链式输送机。
附图说明
33.图1是表示一个实施方式的焚烧设施的结构的概要图。
34.图2是表示图1所示的焚烧设施的链式输送机的结构的概要图。
35.图3是放大表示图2所示的链式输送机中的由标注有附图标记a的虚线包围的区域的图。
36.图4是从上方观察到的图3所示的链式输送机的图。
37.图5是表示左右一对距离传感器的测定结果的一例的图。
38.图6是用于说明基于左右一对距离传感器的测定结果来计算左右一对链条的伸长之差的处理的一例的图。
39.图7是表示左右一对链条的伸长之差的计算结果的一例的表格。
40.图8是用于说明预测左右一对链条的替换时期的处理的一例的图。
具体实施方式
41.以下,参照附图来详细说明本发明的实施方式。需要说明的是,在以下的说明及以下说明所用的附图中,对于能够采用相同结构的部分使用相同的附图标记,并且省略重复说明。
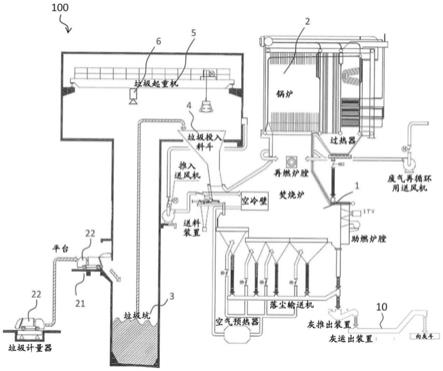
42.图1是表示一个实施方式的焚烧设施100的结构的概要图。
43.如图1所示,焚烧设施100具备:供装载废弃物的输送车辆(垃圾车)22停车的平台21;存放从平台21投入的废弃物的垃圾坑3;对存放于垃圾坑3内的废弃物进行搅拌及输送的起重机5;投入由起重机5输送的废弃物的料斗4;焚烧从料斗4投入的废弃物的焚烧炉1;从在焚烧炉1内产生的废气中回收余热的余热锅炉2;和输送在焚烧炉1内产生的焚烧灰(主灰和一部分飞灰)的链式输送机10。此外,焚烧炉1的种类并不限于图1所示的那种炉排炉,还包括流化炉(也称为流化床炉)。另外,垃圾坑3的构造并不限于图1所示的那种一级坑,还包括二级坑。
44.以装载于输送车辆22的状态被运进的废弃物被从平台21投入到垃圾坑3内并存放于垃圾坑3内。存放于垃圾坑3内的废弃物由起重机5搅拌,并且由起重机5输送至料斗4,然后经由料斗4被投入到焚烧炉1内部,并在焚烧炉1内部被焚烧处理。
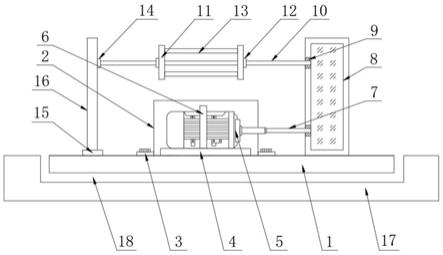
45.接着,参照图2~图4对链式输送机10的结构进行说明。图2是表示链式输送机10的结构的概要图。图3是放大表示图2所示的链式输送机10中的由标注有附图标记a的虚线包围的区域的图。图4是从上方观察到的图3所示的链式输送机10的图。此外,在图3及图4中省略了外壳16的图示。另外,在图4中也省略了沿回程移动的链条13a、13b的图示。
46.如图2~图4所示,链式输送机10具有:驱动部11及从动部12;左右一对链条13a、13b;多个刮板171~174;左右一对距离传感器14a、14b;和信息处理部15。
47.其中,左右一对链条13a、13b分别呈循环状连结(整体具有环形)。左右一对链条
13a、13b既可以是短节(链条式)链,也可以是板式滚子链。
48.如图2所示,左右一对链条13a、13b分别架设于驱动部11与从动部12之间,并在驱动部11与从动部12之间被施加规定的张拉(tension)而被拉伸,使得上侧部分与下侧部分彼此大致平行地延伸。
49.在驱动部11上连结有未图示的马达。当通过马达的动力使驱动部11在图2中逆时针旋转(自转)时,在与驱动部11卡合的左右一对链条13a、13b中,图2中的下侧部分被驱动部11拉拽着向右移动,并且图2中的上侧部分向左移动,链条整体逆时针绕转。左右一对链条13a、13b的上侧部分与下侧部分像这样彼此向相反方向移动(链条整体逆时针绕转),由此与左右一对链条13a、13b卡合的从动部12在图2中逆时针旋转(自转)。
50.如图4所示,行进方向左侧链条13a与行进方向右侧链条13b沿着行进方向彼此平行地延伸。
51.如图3所示,多个刮板171~174(也称为scraper)沿着左右一对链条13a、13b的行进方向大致等间隔地并列配置,并固定于左右一对链条13a、13b之间。如图4所示,各刮板171~174的左侧端部由螺栓固定于左侧链条13a上,右侧端部由螺栓固定于右侧链条13b上。
52.如图2所示,在本实施方式中,左右一对链条13a、13b和驱动部11、从动部12配置于外壳16的内侧。在外壳16中的从动部12侧向上形成有输送物(焚烧灰)的入口16a,在驱动部11的下方向下形成有输送物(焚烧灰)的出口16b。
53.焚烧炉1内所生成的焚烧灰(主灰和一部分飞灰)被从输送物的入口16a投入到外壳16的内侧,并落在外壳16的底板上。固定于逆时针绕转的左右一对链条13a的下侧部分上的刮板171~174将堆积在外壳16的底板上的焚烧灰向图2中的右方推,将其沿着外壳16的底板输送至驱动部11侧,并使其从输送物的出口16b落下。从出口16b落下的输送物被运出至例如未图示的灰坑。从与输送物的出口16b相对的位置通过后的刮板171~174从左右一对链条13a、13b的上侧部分通过并返回至从动部12侧。在本说明书中,有时将左右一对链条13a中的上侧部分(在图2中向左行进的部分)称为回程,并将下侧部分(在图2中向右行进的部分)称为进程。
54.作为左右一对距离传感器14a、14b,例如能够使用超声波式距离传感器或激光式距离传感器。
55.左右一对距离传感器14a、14b朝向刮板171~174通过的位置配置。在图示的例子中,左右一对距离传感器14a、14b朝下配置于左右一对链条13a、13b的回程的上方,但并不限定于此,也可以朝下配置于左右一对链条13a、13b的进程与回程之间。在图示的例子中,左右一对距离传感器14a、14b配置于外壳16的外侧,能够测定从形成于外壳16的窗部穿过直到刮板171~174或外壳16的底板为止的距离d(参照图3),但并不限定于此,也可以配置于外壳16的内侧。
56.图5是表示左右一对距离传感器14a、14b的测定结果的一例的图。沿进程移动的刮板从与外壳16的底板相比离左右一对距离传感器14a、14b较近的位置通过,沿回程移动的刮板从与沿进程移动的刮板相比离左右一对距离传感器14a、14b更近的位置通过。因此,在图5的示例中,当第1刮板171及第2刮板172从左右一对距离传感器14a、14b的下方沿进程通过时,测定比到外壳16的底板的距离小的第1值;当第3刮板173及第4刮板174从左右一对距
离传感器14a、14b的下方沿回程通过时,测定比第1值更小的第2值。
57.在图2的示例中,左右一对距离传感器14a、14b相较于输送物的入口16a在进程的行进方向近前侧(即从动部12侧)朝向刮板171~174通过的位置。由此,通过使从左右一对距离传感器14a、14b前通过的刮板171~174相较于输送物的入口16a位于从动部12侧,由于难以直接碰到从入口16a投入的输送物(焚烧灰),所以能够减少测定误差。另外,如图2所示,在输送物的入口16通常设置有刮板导轨16c,刮板171~174在即将从左右一对距离传感器14a、14b前通过时从刮板导轨16c的位置通过,由此,能够有助于清扫刮板171~174的测定面。另外,通过左右一对距离传感器14a、14b位于从动部12附近,能够基于左右一对距离传感器14a、14b的测定结果来检测由设定于从动部12的松紧装置(未图示)获得的链条张拉因链条13a、13b的磨损进展而降低、且如图2中的虚线所示链条13a、13b重力方向上的松弛度变大的状态。
58.信息处理部15由一个或多个计算机构成,并从左右一对距离传感器14a、14b获取测定结果。信息处理部15具有运算部15a、预测部15b、警报部15c、松弛度检测部15d、第2警报部15e、第2预测部15f、伸长率运算部15g、第3警报部15h和第3预测部15i。
59.运算部15a在链式输送机10的运转过程中基于左右一对距离传感器14a、14b的测定结果而在左右两个位置处计算相邻刮板171~174之间的距离,并根据计算结果来计算左右一对链条13a、13b的伸长之差。
60.对运算部15a的处理进行详细说明。图6是用于说明基于左右一对距离传感器14a、14b的测定结果来计算左右一对链条13a、13b的伸长之差的处理的一例的图。
61.参照图5,运算部15a首先基于左右一对距离传感器14a、14b的测定结果来计算第1刮板171通过的时刻(检测出第1值的时刻)与第2刮板172通过的时刻(下一个检测出第1值的时刻)之间的时间差δta、δtb。其次,运算部15a计算该时间差δta、δtb与左右一对链条13a、13b的输送速度(移动速度)的乘积pa、pb,并使用左右一对距离传感器14a、14b之间的左右方向上的间隔w和左右一对链条13a、13b之间的左右方向上的间隔w0根据(pa-pb)
×
w0/w这个公式来计算左右一对链条13a、13b的间距差(第1刮板171与第2刮板172之间的间隔差)。此外,运算部15a也可以根据驱动部11的马达的旋转速度来求出左右一对链条13a、13b的输送速度(移动速度)。
62.然后,参照图7,运算部15a针对固定于左右一对链条13a、13b之间的全部刮板171~174分别计算左右一对链条13a、13b的间距差(相邻两个刮板之间的间隔差),并将它们在整个链条上进行累计,由此计算左右一对链条的伸长之差(图7中的合计:45mm)。
63.警报部15b将由运算部15a计算出的左右一对链条13a、13b的伸长之差(图7中的合计:45mm)与预先确定的阈值进行比较,并在该伸长之差超过阈值的情况下发出警报。
64.预测部15b基于由运算部15a计算出的左右一对链条13a、13b的伸长之差的时间变化来预测左右一对链条13a、13b的替换时期。
65.对预测部15b的处理进行详细说明。图8是用于说明预测左右一对链条13a、13b的替换时期的处理的一例的图。
66.在图8的示例中,预测部15b在图表上绘制左右一对链条13a、13b的伸长之差的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为左右一对链条13a、13b的替换时期。
67.松弛度检测部15d基于左右一对距离传感器14a、14b的测定结果来检测左右一对链条13a、13b的松弛度。
68.对松弛度检测部15d的处理进行详细说明。如图2中的虚线所示,左右一对距离传感器14a、14b在从动部12附近,朝向由设置于从动部12的松紧装置(未图示)获得的链条张拉因链条13a、13b的磨损进展而降低并导致链条13a、13b重力方向上的松弛度变大的位置。随着链条13a、13b的松弛度变大,从左右一对距离传感器14a、14b的下方沿回程移动的刮板的高度位置变低,即左右一对距离传感器与从其下方沿回程通过的刮板的间隔变短。因此,参照图5,刮板173、174从左右一对距离传感器14a、14b的下方通过时的测定值d与链条13a、13b的松弛度的变大成比例地变大。松弛度检测部15d基于当刮板从左右一对距离传感器14a、14b的下方沿回程通过时所测定的左右一对距离传感器14a、14b的测定值d的张拉调整后的相对于初始值的变化量来检测左右一对链条13a、13b的松弛度。
69.第2警报部15e将由松弛度检测部15d检测到的左右一对链条13a、13b的松弛度与预先确定的第2阈值进行比较,并在该松弛度超过第2阈值的情况下发出警报。
70.第2预测部15f基于由松弛度检测部15d检测到的左右一对链条13a、13b的松弛度的时间变化来预测左右一对链条13a、13b的张拉(tension)的调整时期。例如,第2预测部15f在图表上绘制左右一对链条13a、13b的松弛度的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为左右一对链条13a、13b的张拉的调整时期。左右一对链条13a、13b的张拉(tension)能够使用例如设于从动部12的松紧装置(未图示)来进行调整。
71.伸长率运算部15g在链式输送机10的运转过程中基于左右一对距离传感器14a、14b的测定结果而在左右两个位置处计算相邻刮板171~174之间的距离,并根据计算结果来计算左右一对链条13a、13b的相对于设计值的伸长率。
72.第3警报部15h将由伸长率运算部15g计算出的左右一对链条13a、13b的伸长率与预先确定的第3阈值进行比较,并在该伸长率超过第3阈值的情况下发出警报。
73.第3预测部15i基于由伸长率运算部15g计算出的左右一对链条13a、13b的伸长率的时间变化来预测应将左右一对链条13a、13b更换为新品的时期。例如,第3预测部15i在图表上绘制左右一对链条13a、13b的伸长率的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为左右一对链条13a、13b的新品更换时期。
74.接着,对由这种结构构成的链式输送机10的动作进行说明。
75.首先,参照图2,通过马达(未图示)的动力使驱动部11逆时针旋转(自转),由此,架设于驱动部11与从动部12之间的左右一对链条13a、13b作为链条整体而逆时针绕转。
76.其次,当焚烧炉1内所生成的焚烧灰(主灰和一部分飞灰)被从输送物的入口16a投入到外壳16的内侧并落在外壳16的底板上时,固定于逆时针绕转的左右一对链条13a的下侧部分(进程)上的刮板171~174将堆积在外壳16的底板上的焚烧灰向图2中的右方推,将其沿着外壳16的底板输送至驱动部11侧,并使其从输送物的出口16b落下。从出口16b落下的输送物被运出至例如未图示的灰坑。从与输送物的出口16b相对的位置通过后的刮板171~174从左右一对链条13a、13b的上侧部分(回程)通过并返回至从动部12侧。
77.在链式输送机10的运转过程中,沿进程移动的刮板从与外壳16的底板相比离左右一对距离传感器14a、14b较近的位置通过,沿回程移动的刮板从与沿进程移动的刮板相比
离左右一对距离传感器14a、14b更近的位置通过。因此,如图5所示,在左右一对距离传感器14a、14b中,当第1刮板171及第2刮板172沿进程通过时,测定比到外壳16的底板的距离小的第1值;当第3刮板173及第4刮板174从左右一对距离传感器14a、14b的下方沿回程通过时,测定比第1值更小的第2值。
78.运算部15a在链式输送机10的运转过程中基于左右一对距离传感器14a、14b的测定结果而在左右两个位置处计算相邻刮板171~174之间的距离,并根据计算结果来计算左右一对链条13a、13b的伸长之差。
79.具体而言,例如参照图5,运算部15a基于左右一对距离传感器14a、14b的测定结果来计算第1刮板171通过的时刻(检测出第1值的时刻)与第2刮板172通过的时刻(下一个检测出第1值的时刻)之间的时间差δta、δtb。接着,运算部15a计算该时间差δta、δtb与左右一对链条13a、13b的输送速度(移动速度)的乘积pa、pb,并使用左右一对距离传感器14a、14b之间的左右方向上的间隔w和左右一对链条13a、13b之间的左右方向上的间隔w0根据(pa-pb)
×
w0/w这个公式来计算左右一对链条13a、13b的间距差(第1刮板171与第2刮板172之间的间隔差)。
80.然后,参照图7,运算部15a针对固定于左右一对链条13a、13b之间的全部刮板171~174分别计算左右一对链条13a、13b的间距差(相邻两个刮板之间的间隔差),并将它们在整个链条上进行累计,由此计算左右一对链条的伸长之差(图7中的合计:45mm)。
81.警报部15b将由运算部15a计算出的左右一对链条13a、13b的伸长之差(图7中的合计:45mm)与预先确定的阈值进行比较,并在该伸长之差超过阈值的情况下发出警报。
82.预测部15b基于由运算部15a计算出的左右一对链条13a、13b的伸长之差的时间变化来预测左右一对链条13a、13b的替换时期。具体而言,例如参照图8,预测部15b在图表上绘制左右一对链条13a、13b的伸长之差的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为左右一对链条13a、13b的替换时期。
83.松弛度检测部15d基于左右一对距离传感器14a、14b的测定结果来检测左右一对链条13a、13b的松弛度。具体而言,例如参照图5,松弛度检测部15d基于当刮板从左右一对距离传感器14a、14b的下方沿回程通过时所测定的左右一对距离传感器14a、14b的测定值d的张拉调整后的相对于初始值的变化量来检测左右一对链条13a、13b的松弛度。
84.第2警报部15e将由松弛度检测部15d检测到的左右一对链条13a、13b的松弛度与预先确定的第2阈值进行比较,并在该松弛度超过第2阈值的情况下发出警报。
85.第2预测部15f基于由松弛度检测部15d检测到的左右一对链条13a、13b的松弛度的时间变化来预测左右一对链条13a、13b的张拉(tension)的调整时期。例如,第2预测部15f在图表上绘制左右一对链条13a、13b的松弛度的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为左右一对链条13a、13b的张拉的调整时期。
86.伸长率运算部15g在链式输送机10的运转过程中基于左右一对距离传感器14a、14b的测定结果而在左右两个位置处计算相邻刮板171~174之间的距离,并根据计算结果来计算左右一对链条13a、13b的相对于设计值的伸长率。
87.第3警报部15h将由伸长率运算部15g计算出的左右一对链条13a、13b的伸长率与预先确定的第3阈值进行比较,并在该伸长率超过第3阈值的情况下发出警报。
88.第3预测部15i基于由伸长率运算部15g计算出的左右一对链条13a、13b的伸长率
的时间变化来预测应将左右一对链条13a、13b更换为新品的时期。例如,第3预测部15i在图表上绘制左右一对链条13a、13b的伸长率的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为左右一对链条13a、13b的新品更换时期。
89.根据以上所述的本实施方式,左右一对距离传感器14a、14b朝向刮板171~174通过的位置,运算部15a在运转过程中基于左右一对距离传感器14a、14b的测定结果而在左右两个位置处计算相邻刮板171~174之间的距离,并根据计算结果来计算左右一对链条13a、13b的伸长之差。由此,能够在运转过程中检测左右链条13a、13b的伸长之差。由于在运转过程中能够测定左右链条13a、13b的伸长之差,所以当运转停止后只需要进行链条的替换作业(无需再测定链条的伸长之差),且作业时间大幅缩短。另外,即使是在运转过程中链条发生了急剧伸长的情况下,由于能够检测链条的单侧伸长,所以能够抑制链条脱轨的发生。
90.另外,根据本实施方式,左右一对距离传感器14a、14b相较于输送物的入口16a在从动部12侧朝向刮板171~174通过的位置,从左右一对距离传感器14a、14b前通过的刮板171~174由于难以直接碰到从入口16a投入的输送物(焚烧灰),所以能够减少测定误差。另外,在输送物的入口16通常设置有刮板导轨16c(参照图2),刮板171~174在即将从左右一对距离传感器14a、14b前通过时从刮板导轨16c的位置通过,由此,能够有助于清扫刮板171~174的测定面。另外,通过左右一对距离传感器14a、14b位于从动部12附近,能够基于左右一对距离传感器14a、14b的测定结果来检测由设定于从动部12的松紧装置(未图示)获得的链条张拉因链条13a、13b的磨损进展而降低并导致链条13a、13b重力方向上的松弛度(参照图2的虚线)变大的状态。
91.此外,在上述实施方式中,链式输送机10构成为在焚烧装置100中输送主灰和飞灰,但本发明并不限定于此。例如,链式输送机10也可以构成为在熔炼装置中输送炉渣。通过这种方式也能获得与上述实施方式同样的作用效果。
92.另外,在上述实施方式中构成为:链式输送机10是具备左右一对链条13a、13b的双链式输送机,伸长率运算部15g在链式输送机10的运转过程中基于左右一对距离传感器14a、14b的测定结果而在左右两个位置处计算相邻刮板171~174之间的距离,并根据计算结果来计算左右一对链条13a、13b的相对于设计值的伸长率,但本发明并不限定于此。例如,也可以构成为:链式输送机是具备架设于驱动部与从动部之间的单链条、沿着链条并列配置并固定于链条上的多个刮板、和朝向刮板通过的位置的左右一对距离传感器的单链式输送机,伸长率运算部在链式输送机的运转过程中基于左右一对距离传感器的测定结果而在左右两个位置处计算相邻刮板之间的距离,并根据计算结果来计算链条的相对于设计值的伸长率。
93.具体而言,例如在单链式输送机中,伸长率运算部基于左右一对距离传感器的测定结果而在左右两个位置处计算相邻刮板之间的距离,并求出其平均值(中值),由此计算链条上的相邻刮板之间的距离。然后,伸长率运算部针对固定于链条上的全部刮板分别计算链条上的相邻两个刮板之间的距离,并将它们在整个链条上进行累计,由此,求出链条整体的长度。之后,伸长率运算部通过将链条整体的长度与其设计值进行比较来计算链条的相对于设计值的伸长率。
94.另外,在单链式输送机中,松弛度检测部也可以基于左右一对距离传感器的测定结果来检测链条的松弛度。具体而言,例如松弛度检测部在左右分别计算当刮板从左右一
对距离传感器的下方沿回程通过时所测定的左右一对距离传感器的测定值的张拉调整后的相对于初始值的变化量,并基于其平均值(中值)检测链条的松弛度。
95.另外,在单链式输送机中,也可以是,第2警报部将由松弛度检测部检测到的链条的松弛度与预先确定的第2阈值进行比较,并在该松弛度超过第2阈值的情况下发出警报。
96.另外,在单链式输送机中,也可以是,第2预测部基于由松弛度检测部检测到的链条的松弛度的时间变化来预测该链条的张拉(tension)的调整时期。例如,第2预测部在图表上绘制链条的松弛度的时间变化,并将其近似直线与表示预先确定的阈值的直线交叉的时间预测为该链条的张拉的调整时期。
97.以上,通过例示对本发明的实施方式及变形例进行了说明,但本发明的范围并不限定于此,而是能够在技术方案记载的范围内根据目的来变更和变形。另外,各实施方式及变形例能够在不使处理内容矛盾的范围内适当组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。