1.本发明涉及体育器材领域,特别涉及一种智能跳高架。
背景技术:
2.基于中国目前大力推行素质教育的国情,体育成为了一项重要的科目,因此体育器材行业也到了蓬勃发展。随着科技的进步,传统的体能测试以及体育教学模式正在向智能化转型。跳高运动作为一项重要体育项目,跳高架成为了体育教学和训练不可或缺的体育器材,而跳高架的智能化发展是大势所趋。目前,市面上的跳高架大多为手动调节高度,且不便对高度数据的读取和处理,应用效率较低。通过手机app控制的新型智能跳高架并不多见。
技术实现要素:
3.为了克服现有跳高架不能自动调节高度和自动读取高度数据的缺陷,本发明提出了一种智能跳高架。
4.为了解决上述技术问题,本发明的技术方案为:
5.一种智能跳高架,包括第一支撑组件、第二支撑组件和一个跳高杆,所述第一支撑组件和所述第二支撑组件均包括底盘、电源及控制系统、刻度杆、升降滑槽、升降杆、压紧用手柄螺丝、压块、切换用手柄螺丝、下杆托、上杆托、滑槽顶盖、电机、电机固定架、升降螺母、丝杠和导杆;所述电源及控制系统和所述电机固定架安装再所述底盘上;所述电机安装在所述电机固定架上;所述刻度杆铆接在所述电机固定架上;所述升降滑槽套在所述刻度杆上,所述升降杆与所述升降滑槽可拆卸式固定连接;所述上杆托和所述下杆托铆接在所述升降杆上;所述丝杠和所述导杆安装在所述刻度杆内部;所述丝杠的底部通过联轴器与所述电机的转轴连接,顶部通过轴承与滑槽顶盖的轴孔连接;所述导杆的上下两端分别与所述电机固定架和所述滑槽顶盖固定连接;所述升降滑槽的一侧螺纹连接有压紧用手柄螺丝,所述压块设置在所述升降滑槽和所述刻度杆之间的间隙,所述压块通过所述压紧用手柄螺丝压紧在所述刻度杆上;所述升降滑槽的另一侧和所述升降杆下端设有用于连接所述切换用手柄螺丝的第一螺纹孔,所述升降螺母螺纹连接于所述丝杠上并采用直线轴承连接于所述导杆上,所述升降螺母的侧边设有两个用于连接所述切换用手柄螺丝的第二螺纹孔;所述第一支撑组件中所述升降杆的背面还设有激光上挡板和激光下挡板,其中所述激光下挡板与所述升降杆铰接连接;所述底盘上设有激光测距模块,所述激光上挡板、激光下挡板和所述激光测距模块位于同一竖直方向上,所述激光测距模块与所述电源及控制系统连接。
6.优选的,所述激光上挡板和所述上杆托位于相同高度位置,所述激光下挡板和所述下杆托位于相同高度位置。
7.优选的,所述电源及控制系统包括供电模块、微处理器,所述供电模块提供所述微处理器所需电能,所述微处理器上连接有蓝牙模块和电机驱动模块,所述电机驱动模块控
制所述电机的转向、扭矩和转速;所述蓝牙模块与移动端的app模块连接,所述app模块与云服务器连接。
8.优选的,所述第一支撑组件中所述微处理器上还连接有led显示模块、语音播报模块。
9.优选的,所述app模块包括登录模块、蓝牙连接模块、高度调节模块、数据模块、语音播报模块和使用指南模块;所述蓝牙连接模块用于实现移动端app模块与所述蓝牙模块无线连接;所述高度调节模块用于控制所述支撑组件和所述第二支撑组件中的两个所述升降杆同时升降;所述数据模块用于对跳高成绩数据的显示、存储和排序;所述语音播报模块用于播报使用者自定义的内容;所述使用指南模块用于对app模块中的各模块进行文字或者视频的使用说明。
10.优选的,所述底盘下设有滚轮,所述滚轮上设有止刹模块。
11.优选的,所述供电模块采用的是可移动式充电电源。
12.与现有技术相比,本发明的有益效果是:
13.本发明通过切换用手柄螺丝与升降滑槽、升降杆以及升降螺母的连接,升降滑槽、升降杆和升降螺母成为一体,实现同步自动升降;当松开切换用手柄螺丝,即切换用手柄螺丝与升降螺母的螺纹孔未连接时,升降滑槽、升降杆与升降螺母处于分离状态,则切换成了手动调高模式,通过手动调节压紧用手柄螺丝可压紧或松开升降滑槽与刻度杆之间的压块,进而可以手动调节升降杆的高度位置,实现手动调高;本发明采用激光挡板和激光测距模块实现毫米级别的测量精度,通过将激光挡板分为激光上挡板和激光下挡板,以及激光下挡板可以转动来实现跳高架的两级高度模式,满足不同高度跳高的需求。
附图说明
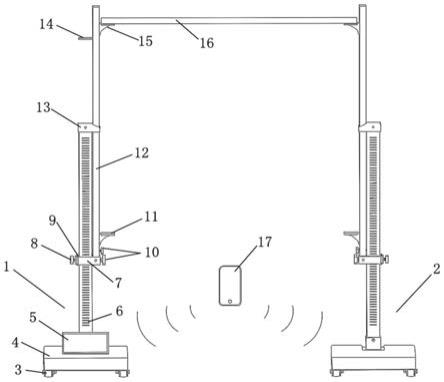
14.图1为本发明智能跳高架的整体结构图;
15.图2为本发明第一支撑组件的结构图;
16.图3为本发明刻度杆内部结构图;
17.图4为本发明升降螺母周边结构图;
18.图5为本发明第一支撑组件中电源即控制系统内部结构图;
19.图6为本发明智能跳高架电路控制原理图;
20.图7为本发明的app模块结构图。
21.图中,1
‑
第一支撑组件;2
‑
第二支撑组件;3
‑
底盘;4
‑
电源及控制系统;5
‑
led显示模块;6
‑
刻度杆;7
‑
升降滑槽;8
‑
压紧用手柄螺丝;9
‑
压块;10
‑
切换用手柄螺丝;11
‑
下杆托;12
‑
升降杆;13
‑
滑槽顶盖;14
‑
激光上挡板;15
‑
上杆托;16
‑
跳高杆;17
‑
移动端;18
‑
激光下挡板;19
‑
激光测距模块;20
‑
电机;21
‑
电机固定架;22
‑
升降螺母;23
‑
丝杠;24
‑
导杆;25
‑
微处理器;26
‑
蓝牙模块;27
‑
供电模块;28
‑
语音播报模块;29
‑
电机驱动模块;30
‑
app模块。
具体实施方式
22.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
23.请综合参考图1至图7,一种智能跳高架,包括第一支撑组件1、第二支撑组件2和一个跳高杆16,第一支撑组件1和第二支撑组件2均包括底盘3、电源及控制系统4、刻度杆6、升降滑槽7、升降杆12、压紧用手柄螺丝8、压块9、切换用手柄螺丝10、下杆托11、上杆托15、滑槽顶盖13、电机20、电机固定架21、升降螺母22、丝杠23和导杆24;电源及控制系统4和电机固定架21安装再底盘3上;电机20安装在电机固定架21上;刻度杆6铆接在电机固定架21上;升降滑槽7套在刻度杆6上,升降杆12与升降滑槽7可拆卸式固定连接;上杆托15和下杆托11铆接在升降杆12上;丝杠23和导杆24安装在刻度杆6内部;丝杠23的底部通过联轴器与电机20的转轴连接,顶部通过轴承与滑槽顶盖13的轴孔连接;导杆24的上下两端分别与电机固定架21和滑槽顶盖13固定连接;升降滑槽7的一侧螺纹连接有压紧用手柄螺丝8,压块9设置在升降滑槽7和刻度杆6之间的间隙,压块9通过压紧用手柄螺丝8压紧在刻度杆6上;升降滑槽7的另一侧和升降杆12下端设有用于连接切换用手柄螺丝10的第一螺纹孔,升降螺母22螺纹连接于丝杠23上并采用直线轴承连接于导杆24上,升降螺母22的侧边设有两个用于连接切换用手柄螺丝10的第二螺纹孔;第一支撑组件1中升降杆12的背面还设有激光上挡板14和激光下挡板18,其中激光下挡板18与升降杆12铰接连接;底盘3上设有激光测距模块19,激光上挡板14、激光下挡板18和激光测距模块19位于同一竖直方向上,激光测距模块19与电源及控制系统4连接。
24.本实施例中,刻度杆6上印有刻度线和双重刻度值,必要时可以人工读取跳高杆16高度值。电机20驱动丝杠23旋转,实现升降螺母22自动升降。当智能跳高架处于正常状态时,切换用手柄螺丝10与升降螺母22侧边的两个螺纹孔处于连接状态,升降滑槽7、升降杆12和升降螺母22成为一体,实现同步自动升降;当智能跳高架出现电控故障时,只需要松开第一支撑组件1和第二支撑组件2的切换用手柄螺丝10,使得切换用手柄螺丝10与升降螺母22的螺纹孔断开连接,升降滑槽7、升降杆12和升降螺母22变成分离状态,便切换成了手动调高模式,通过手动调节压紧用手柄螺丝8可压紧或松开升降滑槽7与刻度杆6之间的压块9,进而可以手动调控升降杆12的高度位置,实现手动调高。系统开机后,供电模块27为整个系统供电,跳高架处于待连接状态,微处理器25通过蓝牙模块26与移动端17的app模块30连接,实现手机等移动端17与跳高架的无线通讯;激光测距模块19与激光下挡板18、激光上挡板14构成激光测距系统,经程序调控后该激光测距系统可以实时测量出跳高杆16所处实际高度。激光下挡板18和激光上挡板14之间的间距和上杆托15和下杆托11之间的间距相同,下杆托11与酒钢下挡板相对应,当跳高杆16放在下杆托11上时,使用的是一级高度模式,属于低高度范围,例如0.3m至1.3m;上杆托15于激光上挡板14相对应,当跳高杆16放在上杆托15时,使用的是二级高度模式,属于较高的高度范围,例如1.3m至2.3m;当采用二级高度模式时,只需用手将激光下挡板18向上拨动,这时激光测距模块19发射的激光由激光上挡板14反射,所测得的高度数据为上杆托15上放有跳高杆16的高度数据,向下拨动激光下挡板18则又可以切换回一级高度模式,这时激光测距模块19发射的激光经由激光下挡板18反射,所测得的高度数据为下杆托11上放有跳高杆16时的高度数据。
25.在一种实施例中,激光上挡板14和上杆托15位于相同高度位置,激光下挡板18和下杆托11位于相同高度位置。
26.本实施例中,将激光上挡板14和上杆托15设于相同位置以及将激光下挡板18和下杆托11设于相同位置,使得激光测距模块19可以直接获取跳高杆16的高度数据,减少计算
量。
27.在一种实施例中,如图5所示,电源及控制系统4包括供电模块27、微处理器25,供电模块27提供微处理器25所需电能,微处理器25上连接有蓝牙模块26和电机驱动模块29,电机驱动模块29控制电机20的转向、扭矩和转速;蓝牙模块26与移动端17的app模块30连接,app模块30与云服务器连接。
28.本实施例中,移动端17的app模块可以通过蓝牙模块26下发控制指令给第一支撑组件1和第二支撑组件2的微处理器25,使得它们同时驱动电机20转动,实现第一支撑组件1和第二支撑组件2的升降杆12的同步升降。
29.在一种实施例中,如图5所示,第一支撑组件1中微处理器25上还连接有led显示模块5、语音播报模块28。
30.本实施例中,激光测距模块19可实时测量出跳高杆16所处实际高度,并通过微处理器25将高度数据传输到led显示模块5和移动端17的app模块30,供跳高相关人员和观众读取,语音播报模块28可用于播报“挑战成功”等自定义语音。
31.在一种实施例中,如图7所示,app模块30包括登录模块、蓝牙连接模块、高度调节模块、数据模块、语音播报模块28和使用指南模块;蓝牙连接模块用于实现移动端17app模块30与蓝牙模块26无线连接;高度调节模块用于控制支撑组件和第二支撑组件2中的两个升降杆12同时升降;数据模块用于对跳高成绩数据的显示、存储和排序;语音播报模块28用于播报使用者自定义的内容;使用指南模块用于对app模块30中的各模块进行文字或者视频的使用说明。
32.本实施例中,蓝牙连接模块用于实现移动端17的app模块30与智能跳高架的第一支撑组件1和第二支撑组件2的无线连接,连接后app模块30会显示实时连接状态,微处理器25等待接收指令;高度调节模块用于实现在指定区域输入一定的高度数据来控制跳高架自动调节到指定的高度位置,使用者在app模块30界面指定区域输入高度值并点击确认后,经蓝牙模块26无线通讯后,微处理器25会接收到指令并根据激光测距模块19测量当前跳高杆16高度进行计算来控制电机驱动模块29实现电机20正转或反转,使升降杆12上升或下降到指定高度位置;数据模块用于对跳高成绩数据进行显示、存储和排除等处理,跳高成绩数据来自于激光测距模块19的结果反馈;语音播报模块28用于播报使用者自定义的内容,如“挑战成功”等,当使用者用app模块30开启语音播报时,第一支撑组件1上的微处理器25会接收到指令并控制语音播报模块28播报出自定义内容,用于增加跳高运动的趣味性;使用者通过使用指南学会智能跳高架的操作,只需要在远处使用手机等移动端17打开app模块30并与跳高架进行蓝牙模块26无线连接,操作app模块30中的各个模块,即可对跳高架进行高效控制和对跳高成绩的处理以及云端存储等,提升跳高教学、训练和比赛的效率。
33.在一种实施例中,底盘3下设有滚轮,滚轮上设有止刹模块。
34.本实施例中,滚轮起到方便移动跳高架的效果,停止移动时使用止刹模块固定住滚轮,使跳高架固定住不再发生移动。
35.在一种实施例中,供电模块27采用的是可移动式充电电源。
36.在一种实施例中,蓝牙模块26采用的时hc
‑
08蓝牙模块。
37.在一种实施例中,电机20采用的是步进电机,步进电机运动平稳可靠、精确度高。
38.以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施
方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

