同时含跑步机运动能力的多功能健身器械
1.所属领域
2.属于健身器材领域。
背景技术:
3.跑步机是最受锻炼者欢迎的健身器械之一,但目前市场上销售的跑步机产品功能明显单一,其明显的不利因素在于:一方面,对于希望在拥有跑步机的家庭而言,若同时采购和使用其它如椭圆机、划船机、冲浪机等较大型的健身器械必然会占用更多的室内空间面积,这使一般家庭很难在拥有跑步机的同时在添置和使用其它较大型的健身器械,这较严重地限制了人们的健身锻炼与消费的需求;另一方面,即使应用于健身房等商用空间,由于房价和租金的高起,如何更高效地利用室内等较昂贵空间与场所,使每一单位面积与空间尽可能地拥有更多更好的技术功能与更大服务能力,使跑步机等核心产品同时拥有更多功能、更强服务能力,无疑是最重要的解决方向与直接方式之一,这对于数量会更加众多的中小微型的健身会所与健身空间的意义更加重大。另外,对于世界上发达的国家与地区中众多的家庭健身房而言,多功能的健身器械也可以明显提升其使用能力与价值,同时,对于较广大的国家和地区的消费者而言,其可能会认为或直接习惯于在室外的各种空间进行跑步运动与锻炼,而在家庭或健身会所中进行划船、冲浪、乃至骑马机、健身车、椭圆机运动等一般室外空间无法提供的、必须依托特定器械才能实现的健身过程,这使上述相关器械具有更大的优先必要性、与不可替代性,若使这些相关器械也同时具有跑步机的(辅助)功能,只要设计的好、功能可靠、使用较方便,其对于广大家庭、小微健身会所乃至一般的大中型会所等健身服务业而言,其意义与价值也是十分大的。
4.发明创造的目的
5.本发明创造的目的是要提供均可同时实现跑步机运动与锻炼过程的多功能划船机或多功能冲浪机或多功能骑马机或多功能椭圆机或其它相应的新式健身运动产品。
6.发明创造的内容与有益价值
7.本发明创造的目的是这样实现的:通过使相关的划船机、冲浪机、骑马机、椭圆机等产品之上的相应的踏板等结构系统,同时也获得跑步机的跑板或及跑带等的功能——使踏板同时成为跑板或及在跑板之上加设跑带等,以使相应的健身器械在可提供划船、冲浪、骑马、椭圆驱跑等运动的同时、也可以向人们提供跑步等运动的锻炼过程,从而使广大的家庭与健身会所获得更高效、更实用的健身装备,
8.相关发明的主要内容包括:
9.(一)、同时含跑步机运动能力的(简单)往复运动轨迹式多功能冲浪机。
10.(二)、同时含跑步机运动能力的“8字形”运动轨迹式多功能冲浪机。
11.(三)、同时含跑步机运动能力及(简单)往复式手动摆臂结构系统的(简单)往复运动轨迹式多功能冲浪机(或划船机)
12.(四)、同时含跑步机运动能力及椭圆运动手动摆臂结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)
13.(五)、同时含跑步机运动能力及相关的电驱动结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)。
14.(六)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全圆周脚踏运动轨迹的多功能冲浪机(划船机)。
15.(七)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全椭圆脚踏运动轨迹的多功能冲浪机(划船机)。
16.(八)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统且手脚均还可实现“8字形”配合运动轨迹的多功能冲浪机(划船机)。
17.(九)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统且可进行站立或及座姿波浪划船运动的多功能划船机。
18.(十)、同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的后驱式多功能椭圆机。
19.(十一)、还可采取其它多种形式的同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的前驱式多功能椭圆机。
20.(十二)、同时含跑步机运动能力及相关的往复运动手动摆臂结构系统的多功能椭圆机。
21.(十三)、含左、右椭圆运动手动摆臂结构系统的可手脚联动的跑步机。
附图说明
22.对附图1——31说明如下:
23.附图1a、1b分别为同时含跑步机运动能力的(直线)往复运动轨迹式多功能冲浪机的主视图、俯视图。
24.附图2a、2b分别为同时含跑步机运动能力的“8字形”运动轨迹式多功能冲浪机的主视图、俯视图。
25.附图3为同时含跑步机运动能力及相关扶手结构系统的“8字形”运动轨迹式多功能冲浪机的视图情况。
26.附图4为同时含跑步机运动能力及相关曲线式轨道结构系统的往复运动轨迹式多功能冲浪机的视图情况。
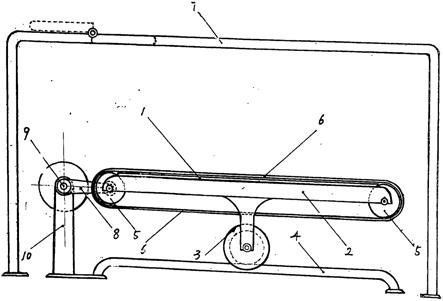
27.附图5为同时含跑步机运动能力及相关的手动摆臂结构系统的往复运动轨迹式多功能冲浪机(或划船机)的视图情况。
28.附图6为同时含跑步机运动能力及椭圆运动手动摆臂结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)的视图情况。
29.附图7a、7b分别为同时含跑步机运动能力及相关的电驱动结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)的主视图、俯视图。
30.附图8为同时含跑步机运动能力及相关的电驱动结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)的俯视图的局部放大图。
31.附图9为一种含椭圆运动手动摆臂结构系统及全圆周脚踏运动轨迹的多功能冲浪机(划船机)的视图情况。
32.附图10为一种同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全圆周脚
踏运动轨迹的多功能冲浪机(划船机)的视图情况。
33.附图11为含椭圆运动手动摆臂结构系统及全椭圆脚踏运动轨迹的多功能冲浪机(划船机或椭圆机)的视图情况。
34.附图12为一种同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全椭圆脚踏运动轨迹的多功能冲浪机(划船机或椭圆机)的视图情况。
35.附图13为一种含椭圆运动手动摆臂结构系统且手脚均还可实现“8字形”配合运动轨迹的多功能冲浪机(划船机)的视图情况。
36.附图14为同时含跑步机运动能力与椭圆运动手动摆臂结构系统且手脚均还可实现“8字形”配合运动轨迹的多功能冲浪机(划船机)的视图情况。
37.附图15为一种含椭圆运动手动摆臂结构系统且可进行站立或及座姿波浪划船运动的多功能划船机的视图情况。
38.附图16为同时含跑步机运动能力与椭圆运动手动摆臂结构系统且可进行站立或及座姿波浪划船运动的多功能划船机的视图情况。
39.附图17为同时含跑步机运动能力与相关的椭圆运动手动摆臂结构系统的后驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
40.附图18为同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的后驱式多功能椭圆机的左右踏板等处于平行驱动状态的视图情况。
41.附图19为同时含跑步机运动能力及相关的左右脚中间运动保护结构系统的后驱式多功能椭圆机的左右踏板等处于平行驱动状态的视图情况。
42.附图20为一种形式的同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的前驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
43.附图21为另一种形式的含椭圆运动手动摆臂结构系统的前驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
44.附图22为另一种形式的同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的前驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
45.附图23为同时含跑步机运动能力及相关的往复运动手动摆臂结构系统的多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
46.附图24为同时含跑步机运动能力及相关的往复运动手动摆臂结构系统的多功能椭圆机的左右踏板等处于平行驱动状态的视图情况。
47.附图25a、25b分别为同时含椭圆运动手动摆臂结构系统,且椭圆运动手动摆臂控轨曲柄的中轴直接与跑步机前滚筒轴同轴心或及同轴设置的可手脚联动的跑步机的主视图与俯视图。
48.附图26a、26b分别为同时含椭圆运动手动摆臂结构系统,且椭圆运动手动摆臂控轨曲柄的中轴与跑步机的前滚筒轴非同轴、也非同轴心设置的可手脚联动的跑步机的主视图与俯视图。
49.附图27a、27b分别为含椭圆运动手动摆臂结构系统,同时椭圆运动手动摆臂控轨曲柄的中轴与跑步机的前滚筒轴非同轴、也非同轴心设置,且左、右椭圆运动手动摆臂曲柄的中轴结构分别直接设在一左右贯通的联动轴结构的两端的可手脚联动的跑步机的主视图与俯视图。
50.附图28、29、30均为含有椭圆运动手动摆臂结构系统,同时设有可翻转折叠的健身车结构系统的多功能跑步机的视图情况;其中的附图28为相应的健身车结构系统处于收缩折叠状态的情况,附图29为相应的健身车结构系统处于工作状态的情况,附图30之中同时展示出了相应的健身车结构系统处于工作状态或收缩折叠状态的情况;
51.附图31为含有椭圆运动手动摆臂结构系统,同时设有可翻转折叠的椭圆机结构系统的多功能跑步机的视图情况,其同时展示出了相应的椭圆机结构系统处于工作状态或收缩折叠状态的情况。
具体实施方式
52.对本多功能健身器械的较具体结构情况分别说明如下:
53.(一)、同时含跑步机运动能力的(简单)往复运动轨迹式多功能冲浪机。
54.——(可参考附图1等中所示的情况)
55.同时含跑步机运动能力的(简单)往复运动轨迹式多功能冲浪机由相应的(跑板式)踏板结构1、踏板骨架结构2和设于冲浪机下部或两侧的导轮结构3、导轨结构4及相应的扶手结构7等所构成,可在踏板骨架结构2的两端设置相应的(跑步机)滚筒结构5、并使冲浪机踏板结构1拥有跑板的相应能力,进一步依托滚筒结构5和(跑板式)踏板结构1等设置相应的跑带结构6;同时设置可使导轮结构3等处于完全锁止状态(与导轨结构4之间不发生任何相对运动)或顺畅运动状态的相关控制机构,并设置可使滚筒结构5、跑带结构6处于完全锁止状态(与跑板式踏板结构1等之间不发生任何相对运动)或顺畅运动状态的相关控制机构,即可形成同时含跑步机运动能力的往复运动轨迹式多功能冲浪机。(可如附图1a、1b等中所示的情况)。
56.当要进行相应的冲浪运动锻炼时,可使跑带结构6处于完全锁止状态,而使导轮结构3处于顺畅运动状态;当要进行相应的跑步运动锻炼时,可使导轮结构3等处于完全锁止状态,而使跑带结构6处于顺畅运动状态。
57.根据需要,上述同时含跑步机运动能力的往复运动轨迹式多功能冲浪机之上亦可采用直线形式的或相应的中间上凸式或中间下凹式等曲线形式的轨道结构系统。(部分可如附图4中所示的情况)。
58.(二)、同时含跑步机运动能力的“8字形”运动轨迹式多功能冲浪机。
59.——(可参考附图2a、2b、3等中所示的情况)
60.同时含跑步机运动能力的“8字形”运动轨迹式多功能冲浪机由相应的(跑板式)踏板结构1、踏板骨架结构2和设于冲浪机下部或两侧的一套导轮结构3、相应的导轨结构4及可带动冲浪机踏板骨架结构2、踏板结构1等做“8字形”轨迹运动的踏板驱动曲柄结构8、踏板驱动曲柄中轴结构9、踏板驱动曲柄中轴轴座骨架结构10等构成。(可如附图2a、2b、3等中所示的情况)。
61.可在踏板骨架结构2的两端设置相应的(跑步机)滚筒结构5,其一端的滚筒结构5的轴心可与踏板驱动曲柄结构8在踏板骨架结构2之上的枢轴结构的轴心完全重合,同样使冲浪机踏板结构1拥有跑板的相应能力,进一步依托滚筒结构5和跑板式踏板结构1等设置相应的跑带结构6;同时设置可使踏板驱动曲柄结构8或及导轮结构3等处于完全锁止状态(与导轨结构4之间不发生任何相对运动)或顺畅运动状态的相关控制机构,并设置使滚筒
结构5、跑带结构6处于完全锁止状态(与跑板式踏板结构之间不发生任何相对运动)或顺畅运动状态的相关控制机构,即可形成同时含跑步机运动能力的“8字形”运动轨迹式多功能冲浪机。(可如附图2a、2b、3等中所示的情况)。
62.当要进行相应的冲浪运动锻炼时,可使跑带结构6等处于完全锁止状态,而使旋转曲柄结构8、导轮结构3等处于顺畅运动状态;当要进行相应的跑步运动锻炼时,可使旋转曲柄结构8或及导轮结构3等处于完全锁止状态,而使跑带结构6等处于顺畅运动状态。
63.根据需要,上述同时含跑步机运动能力的“8字形”运动轨迹式多功能冲浪机之上亦可加设相应的扶手结构7等结构系统。(可如附图3中所示的情况)。
64.(三)、同时含跑步机运动能力及(简单)往复式手动摆臂结构系统的(简单)往复运动轨迹式多功能冲浪机(或划船机)
65.——(可参考附图5等中所示的情况)
66.相关的含往复式手动摆臂结构系统的(简单)往复运动轨迹式冲浪机(或划船机)由相应的跑板式踏板结构1、踏板骨架结构2和设于冲浪机下部或两侧的导轮结构3、导轨结构4及可带动冲浪机踏板骨架结构2、踏板结构1等做往复运动的往复式手动摆臂结构11、往复式手动摆臂中轴结构12、往复式手动摆臂中轴轴座骨架结构13等构成,
67.在踏板骨架结构2的两端设置相应的(跑步机)滚筒结构5,其一端的滚筒结构6的轴心可与往复式手动摆臂结构11在踏板骨架结构2之上的枢轴结构的轴心完全重合,同样使冲浪机踏板结构1拥有跑板的相应能力,进一步依托滚筒结构5和跑板式踏板结构1等设置相应的跑带结构6;同时设置可使往复式手动摆臂结构11或及导轮结构3等处于完全锁止状态(与导轨结构4之间不发生任何相对运动)或顺畅运动状态的相关控制机构,并设置使滚筒结构5、跑带结构6处于完全锁止状态(与跑板式踏板结构1之间不发生任何相对运动)或顺畅运动状态的相关控制机构,即可形成同时含跑步机运动能力及相关的手动摆臂结构系统的往复运动轨迹式多功能冲浪机(或划船机)。(可如附图5等中所示的情况)。
68.当要进行相应的冲浪运动或划船运动锻炼时,可使跑带结构6处于完全锁止状态而使往复式手动摆臂结构11、导轮结构3等处于顺畅运动状态;当要进行相应的跑步运动锻炼时,可使往复式手动摆臂结构11或及导轮结构3等处于完全锁止状态,而使跑带结构6处于顺畅运动状态。
69.(四)、同时含跑步机运动能力及椭圆运动手动摆臂结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)
70.——(可参考附图6等中所示的情况)
71.相关的含椭圆运动手动摆臂结构系统的“8字形”运动轨迹式冲浪机(或划船机)由相应的跑板式踏板结构1、踏板骨架结构2和设于冲浪机下部或两侧的一套导轮结构3、相应的导轨结构4及可带动冲浪机踏板骨架结构2、踏板结构1等做“8字形”运动的椭圆运动手动摆臂结构14、椭圆运动手动摆臂控轨曲柄结构15、椭圆运动手动摆臂控轨曲柄中轴结构16、椭圆运动手动摆臂控轨曲柄中轴轴座骨架结构17、椭圆运动手动摆臂控轨摆杆结构18、椭圆运动手动摆臂控轨摆杆中轴结构19、椭圆运动手动摆臂控轨摆杆中轴轴座骨架结构20等构成,椭圆运动手动摆臂结构14通过不同的相应枢轴结构同时与椭圆运动手动摆臂控轨曲柄结构15及椭圆运动手动摆臂控轨摆杆结构18相互枢接。
72.在踏板骨架结构2的两端设置相应的(跑步机)滚筒结5,其一端的滚筒结构5的轴
心可与椭圆运动手动摆臂结构14与踏板骨架结构2之间的枢轴结构的轴心完全重合,同样使冲浪机踏板结构1拥有跑板的相应能力,进一步依托滚筒结构5和跑板式踏板结构1等设置相应的跑带结构6;同时设置可使椭圆运动手动摆臂结构14或及导轮结构3等处于完全锁止状态(与导轨结构4之间不发生任何相对运动)或顺畅运动状态的相关控制机构,并设置使滚筒结构5、跑带结构6处于完全锁止状态(与跑板式踏板结构1之间不发生任何相对运动)或顺畅运动状态的相关控制机构,即可形成同时含跑步机运动能力及椭圆运动手动摆臂结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)。(可如附图6等中所示的情况)。
73.当要进行相应的冲浪运动或划船运动锻炼时,可使跑带结构6处于完全锁止状态而使椭圆运动手动摆臂结构14、导轮结构3等处于顺畅运动状态;当要进行相应的跑步运动锻炼时,可使椭圆运动手动摆臂结构14或及导轮结构3等处于完全锁止状态,而使跑带结构6处于顺畅运动状态。
74.(———上述及下述所涉及的各相关的“踏板结构”也可为功能近似的其它相关结构系统,如也可为由一系列滚筒或其它适宜结构构成的能够引导相应的跑道做循环运动的相应结构系统。)
75.(五)、同时含跑步机运动能力及相关的电驱动结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)。
76.——(可参考附图7、8中所示的情况)
77.相关的含椭圆运动手动摆臂结构系统的“8字形”运动轨迹式冲浪机(或划船机)由相应的跑板式踏板结构1、踏板骨架结构2和设于冲浪机下部或两侧的一套导轮结构3、相应的导轨结构4及可带动冲浪机踏板骨架结构2、踏板结构1等做“8字形”运动的椭圆运动手动摆臂结构14、椭圆运动手动摆臂控轨曲柄结构15、椭圆运动手动摆臂控轨曲柄中轴结构16、椭圆运动手动摆臂控轨曲柄中轴轴座骨架结构17、椭圆运动手动摆臂控轨摆杆结构18、椭圆运动手动摆臂控轨摆杆中轴结构19、椭圆运动手动摆臂控轨摆杆中轴轴座骨架结构20、驱动电机及相应的传动结构系统等构成,椭圆运动手动摆臂结构14的中部和下端通过不同的相应枢轴结构分别与椭圆运动手动摆臂控轨摆杆结构18和椭圆运动手动摆臂控轨曲柄结构15的外端相互枢接。
78.在踏板骨架结构2的两端设置相应的(跑步机)滚筒结5,进一步依托滚筒结构5和跑板式踏板结构1等设置相应的跑带结构6;同时设置可使椭圆运动手动摆臂结构14或及导轮结构3等处于完全锁止状态(与导轨结构4之间不发生任何相对运动)或顺畅运动状态的相关控制机构,并设置使滚筒结构5、跑带结构6处于完全锁止状态(与跑板式踏板结构1之间不发生任何相对运动)或顺畅运动状态的相关控制机构,即可形成同时含跑步机运动能力及椭圆运动手动摆臂结构系统的“8字形”运动轨迹式多功能冲浪机(或划船机)。(可如附图7、8中所示的情况)。
79.相关产品的进一步的具体的结构与配合关系等可以采用下述的形式或其它适宜的方式。
80.通过相应的设置,可使驱动电机转子芯轴40与椭圆运动手动摆臂控轨曲柄结构15的中轴结构16的轴心完全重合,或进一步使手动摆臂控轨曲柄结构15的中轴结构16直接设置于驱动电机转子芯轴40的沿出(轴)结构之上,同时可使椭圆运动手动摆臂控轨曲柄结构
15的外端与跑带前滚筒轴结构42相互枢接。
81.在跑带前滚筒轴结构42之上设置相应的从动轮43——从动皮带轮或链轮或其它适宜的传动结构,并依托相应的皮带或链条或其它适宜结构实现与设于驱动电机转子芯轴40上的主动皮带轮或链轮或其它适宜的传动结构44的连接,使驱动电机的输出扭矩传递至跑带前滚筒及跑带等结构之上,从而实现电机带动下的跑步机运动模式。
82.根据需要,可依托跑带前滚筒轴42及设于其上的相应的驱动轮45,带动可直接驱动曲柄结构15运动的曲柄主动轮(皮带轮或链轮或齿轮等)46,并可通过相应的离合器等结构系统,使曲柄主动轮46可与驱动轮45(或及跑带前滚筒轴42)直接接合或分离,
83.通过相应的皮带或链条或其它适宜结构实现驱动轮45与可设于椭圆运动手动摆臂控轨曲柄结构15的中轴结构16上的曲柄主动轮46的连接,使驱动电机的输出扭矩通过上述相关结构系统的转换与传输而传递至椭圆运动手动摆臂控轨曲柄结构15的中轴16——手动摆臂控轨曲柄结构15——椭圆运动手动摆臂及相应的跑板与板骨架等结构之上,从而实现电机带动下的冲浪、划船、骑马等的运动模式。
84.在上述相关的传动、离合等结构系统的支持下,一方面,在相应的人力驱动的跑步机运动模式或人力驱动的冲浪、划船、骑马等的运动模式中可使在相应的人体动力带动电机转子运动发电或使电机转子发挥阻力及惯性蓄能的作用;另一方面,相应的人的跑步机运动模式或冲浪、划船、骑马等的运动模式亦可完全通过电机的相应的驱动过程来实现。
85.当然,根据需要,亦可通过相应的离合系统使上述运动模式下的运动过程与相应的驱动电机系统不发生任何直接联系,并使整个产品处于相应的工作模式状态。
86.通过与跑带前滚筒轴结构42相互枢接的椭圆运动手动摆臂控轨曲柄结构15所处角位的选择(电动或手动),同时设置相应的分合与锁固结构系统,可使跑带前滚筒轴42处于不同的空间位置之上,从而也可使相应的跑板骨架结构2、跑带结构6等处于相应的适宜的倾角状态与空间位置之上。(可如附图7、8中所示的情况)
87.(六)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全圆周脚踏运动轨迹的多功能冲浪机(划船机)。
88.——(可参考附图9、10中所示的情况)。
89.在双脚可进行全圆周轨迹运动的冲浪机的前端设置椭圆运动手动摆臂结构系统,椭圆运动手动摆臂结构14的下端与(全圆周运动轨迹式)冲浪机的踏板骨架结构2的前段部分或冲浪机踏板骨架结构2的向前沿出结构部分21或相应的踏板联动(驱动、控轨)曲柄结构22相互枢接;椭圆运动手动摆臂结构14的中间部分与椭圆运动手动摆臂控轨摆杆结构23的前端相枢接,椭圆运动手动摆臂控轨摆杆结构23的中部可与相应的固定骨架结构24相互枢接,整个椭圆运动手动摆臂控轨摆杆结构23在可做为相应的运动扶手结构的同时亦可做为运动驱动结构。这样即可形成含椭圆运动手动摆臂结构系统及全圆周脚踏运动轨迹的多功能冲浪机。(可如附图9中所示的情况)。
90.进一步,直接利用(冲浪机)踏板骨架结构2与前、后踏板联动曲柄结构22之间的枢轴结构,或利用可设于踏板骨架2其它适宜位置之上的相应的轴结构,设置跑步机滚筒结构5,同时利用冲浪机踏板结构1做为相应的跑板结构进一步设置相应的跑带结构6等,即可形成同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全圆周脚踏运动轨迹的多功能冲浪机(划船机)。(可如附图10中所示的情况)。
91.(七)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全椭圆脚踏运动轨迹的多功能冲浪机(划船机)。
92.——(可参考附图11、12中所示的情况)。
93.通过在前后位置均设置类似于附图6及前面的(四)等之中所介绍的可直接实现椭圆运动轨迹的相关结构系统——椭圆运动摆臂结构系统,并使冲浪机踏板骨架结构2的前、后端分别与前置及后置的椭圆运动摆臂结构25的下端相互枢接,若同时使前置的椭圆运动摆臂结构成为可进行手驱动的结构系统,即可形成含椭圆运动手动摆臂结构系统及全椭圆脚踏运动轨迹的多功能冲浪机(划船机)。(可如附图11中所示的情况)。
94.进一步,直接利用(冲浪机)踏板骨架结构2与前、后椭圆运动摆臂结构25下端之间的枢轴结构,或利用可设于踏板骨架结构2其它适宜位置之上的相应的轴结构,设置跑步机滚筒结构5,同时利用冲浪机踏板结构1做为相应的跑板结构进一步设置相应的跑带结构6等,即可形成同时含跑步机运动能力与椭圆运动手动摆臂结构系统及全椭圆脚踏运动轨迹的多功能冲浪机(划船机)。(可如附图12中所示的情况)。
95.(八)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统且手脚均还可实现“8字形”配合运动轨迹的多功能冲浪机(划船机)。
96.——(可参考附图13、14中所示的情况)。
97.设置类似于附图6及前面的(四)等之中所介绍的可直接实现椭圆运动轨迹的相关结构系统——椭圆运动手动摆臂结构系统,并使椭圆运动手动摆臂结构14带动相应的(冲浪机)踏板骨架结构2及踏板结构1,同时在冲浪机的踏板骨架结构2的中部的下面或两侧设置相应的导轮结构3、导轨结构4等结构,既可形成双脚可配合进行“8字形”运动轨迹的冲浪机。(可如附图13之中相应的部分所示的情况)。
98.进一步,设置其前端可与椭圆运动手动摆臂结构14的上部相互枢接的“8字形”(运动)轨迹手动摆臂结构26,“8字形”轨迹手动摆臂结构26的中部与“8字形”轨迹手动摆臂摆杆结构27的一端相互枢接,“8字形”轨迹手动摆臂摆杆结构27的另一端与相应的居于较中间位置的固定骨架结构(部分)28相互枢接。这样,即可进一步形成含椭圆运动手动摆臂结构系统且手脚均还可实现“8字形”全协调配合运动轨迹的多功能冲浪机(划船机)。(可如附图13中所示的情况)。
99.采用基本与附图6及前面的(四)等之中所介绍的相近同的方式,进一步增加设置相应的滚筒结构5,跑带结构6等结构,即可形成同时含跑步机运动能力与椭圆运动手动摆臂结构系统且手脚均还可实现“8字形”全协调配合运动轨迹的多功能冲浪机(划船机)的视图情况。(可如附图14中所示的情况)。
100.(九)、同时含跑步机运动能力与椭圆运动手动摆臂结构系统且可进行站立或及座姿波浪划船运动的多功能划船机。
101.——(可参考附图15、16中所示的情况)。
102.一方面,设置相应的椭圆运动手动摆臂结构系统,并使椭圆运动手动摆臂结构14的下端(下部)与近椭圆运动轨迹的(脚踏或鞍座的)波浪运动摆臂骨架结构31的前部的适当结构部分相互枢接,或使椭圆运动手动摆臂结构14的下端(下部)直接与相应的波浪划船机(前部)的联动曲柄结构29外侧的枢轴结构30相互枢接,枢轴结构30可直接为联动曲柄结构29与波浪运动摆臂骨架结构31之间的枢轴结构。
103.波浪运动摆臂骨架结构31的前端与联动曲柄结构29相互枢接,其后端与相应的摆杆结构相枢接或与相应的导轮导轨等结构相配合,同时,在波浪运动摆臂骨架结构31之上设置相应的站立划船踏板结构32,通过上述结构设置即可形成含椭圆运动手动摆臂结构系统且可进行站立姿态波浪划船运动的波浪能划船机系统。
104.另一方面,在(脚踏或鞍座的)波浪运动摆臂骨架结构31之上设置相对固定形式的或可调节或及可拆卸形式的鞍座结构33,同时设置可做(纵向的)近椭圆轨迹运动,或及——乃至可同时做横向的摆动等运动的座姿划船手动摆臂结构34,座姿划船手动摆臂结构34的中间部分可与波浪运动摆臂骨架结构31的适宜部分相枢接,座姿划船手动摆臂结构34的下端与相应的座姿划船手动摆臂摆杆结构35相互枢接,座姿划船手动摆臂摆杆结构35的另一端与相应的固定骨架结构相枢接,座姿划船手动摆臂结构34的上部为相应的驱动管杆结构、驱动把手结构等,根据需要,座姿划船手动摆臂结构34的上部可采用固定结构形式或可折叠乃至或可拆卸的结构形式;同时在相应的骨架结构之上设置座姿划船踏板结构36。通过上述结构设置,即可形成含椭圆运动手动摆臂结构系统且可进行坐姿波浪划船运动的波浪划船机系统。
105.将上述两个方面整合在一起,即可形成含椭圆运动手动摆臂结构系统且可进行站立姿态及座姿波浪划船运动的多功能划船机产品。(可如附图15中所示的情况)。
106.根据需要,相应的椭圆运动手动摆臂结构14、座姿划船手动摆臂结构34的适宜部分均可采用可折叠、可伸缩的灵活的结构设置方式。
107.当然,上述可同时实现站立或及座姿波浪划船运动的多功能划船机也可根据需要被分解和简化为只进行站立式波浪划船运动的划船机或只进行座姿波浪划船运动的划船机。
108.进一步,通过采用与前述的其它器械中类似的方式,即在骨架结构31的适宜的位置之上增加设置相应的滚筒结构5及跑带结构6等,即可形成同时含跑步机运动能力与椭圆运动手动摆臂结构系统且可进行站立或及座姿波浪划船运动的多功能划船机(可如附图16等中所示的情况)。
109.当然,上述同时含跑步机运动能力且可同时实现站立或及座姿波浪划船运动的多功能划船机也可根据需要被分解和简化为只进行站立式波浪划船运动的划船机或只进行座姿波浪划船运动的同时具有跑步机运动能力划船机。
110.(十)、同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的后驱式多功能椭圆机。
111.借鉴前述的冲浪机、划船器等的结构设置方式,使相关的含椭圆运动手动摆臂结构系统的椭圆机的左右椭圆运动踏板结构37、左右椭圆运动踏板骨架结构38等变成相应跑步机的可动形式的跑板结构、跑板骨架结构等,则可形成同时含跑步机运动能力与相关的椭圆运动手动摆臂结构系统的多功能椭圆机或者称为含椭圆运动手动摆臂结构系统的椭圆机与跑步机的组合产品。
112.——(可参考附图17、18、19中所示的情况)。
113.其中,附图17为同时含跑步机运动能力与相关的椭圆运动手动摆臂结构系统的后驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
114.附图18为同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的后驱式
多功能椭圆机的左右踏板等处于平行驱动状态的视图情况。
115.考虑到更适于人体跑步锻炼等的需要,可使相应的左右椭圆运动踏板结构37等结构系统之间的间隔应尽可能地缩小,同时,为确保更加安全地使用,可在上述的左右椭圆运动踏板结构37等结构间设置固定形式的中间隔板或中间格挡保护结构39,或设置其高低等可升降调节形式中间隔板或中间格挡保护结构39等,当采用椭圆机的运动模式时,使上述可升降调节形式中间隔板或中间格挡保护结构39等处于适宜的较高的位置状态,以更好地确保运动安全,当采用跑步机的运动模式时,使上述可升降调节形式中间隔板或中间格挡保护结构39等的上缘位置与左右跑带结构基本持平,以更好地满足顺畅跑步运动的需要。(可参考附图19中所示的情况)。
116.(十一)、还可采取其它多种形式的同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的前驱式多功能椭圆机。
117.——(可参考附图20、22、23等中所示的情况)。
118.附图20展示的是一种形式的同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的前驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
119.附图21展示的是另一种形式的含椭圆运动手动摆臂结构系统的前驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
120.附图22展示的是另一种形式的同时含跑步机运动能力及相关的椭圆运动手动摆臂结构系统的前驱式多功能椭圆机的左右踏板等处于交替驱动状态的视图情况。
121.(十二)、同时含跑步机运动能力及相关的往复运动手动摆臂结构系统的多功能椭圆机。
122.——(可参考附图23、24中所示的情况)。
123.使相应的含往复运动手动摆臂结构系统的椭圆机的左右椭圆运动踏板结构37、左右椭圆运动踏板骨架结构38等变成相应跑步机的可动形式的跑板结构、跑板骨架结构等,则可形成同时含跑步机运动能力与相关的往复运动手动摆臂结构系统的多功能椭圆机或者称为含往复运动手动摆臂结构系统的椭圆机与跑步机的组合产品。
124.(十三)、含左、右椭圆运动手动摆臂结构系统的可手脚联动的跑步机。
125.——(可参考附图25至31中所示的情况)。
126.使相应的左、右椭圆运动手动摆臂结构14的下端与椭圆运动手动摆臂控轨曲柄结构15的外端直接或间接相互枢接,左、右椭圆运动手动摆臂结构14的中部与椭圆运动手动摆臂控轨摆杆18直接或间接相互枢接;左、右椭圆运动手动摆臂结构14的中部也可通过与相应的导轮——导轨或滑块——滑轨等结构系统之间的相配合,实现相应的上下等方向上的受控往复运动;左、右椭圆运动手动摆臂结构14的上部可以直接作为运动把手结构使用或与相应的更加适宜的把手结构直接或间接相连接。
127.同时,一种选择是:使左右椭圆运动手动摆臂曲柄中轴16直接与跑步机的前滚筒5同轴心乃至同轴设置,使左、右椭圆运动手动摆臂结构14直接与跑步机的前滚筒5及跑带6等相联动。(可如附图25中所示的情况)。
128.更多情况下可采用的结构选择是:在左、右椭圆运动手动摆臂曲柄中轴结构16之上设置相应的曲柄皮带轮或曲柄链轮结构47,同时,在跑步机的前滚筒5或前滚筒的沿出转轴42之上设置相应的滚筒皮带轮或滚筒链轮结构48,曲柄皮带轮或曲柄链轮结构47与滚筒
皮带轮或滚筒链轮结构48之间通过相应的皮带或链条结构49实现连接与联动。通过设置相应的皮带或链条的张紧或调距等结构,可使在左、右椭圆运动手动摆臂曲柄中轴结构16与跑步机前滚筒的轴心之间的距离发生改变时仍能实现相应的良好的传动过程。依托上述设置,可实现左、右椭圆运动手动摆臂结构14与跑步机前滚筒及跑带等的联动,且通过相应传动比的设置,可使左、右椭圆运动手动摆臂结构14的循环运动频率、运动速度与跑步机前滚筒的转速及跑带的动速之间的形成最佳或最符合需要的配合与选择,从而,使腿脚的跑步运动过程与借助椭圆运动手动摆臂结构而实现的手臂的近椭圆轨迹的运动过程之间的更加协调和更加适宜的联动与整合。(可如附图26中所示的情况)。
129.一些情况下,可使左、右椭圆运动手动摆臂曲柄的中轴结构16直接设在一左右贯通的联动轴结构50的两端,从而可实现只依靠一套曲柄皮带轮或曲柄链轮结构47与滚筒皮带轮或滚筒链轮结构48之间的配合即可实现左、右椭圆运动手动摆臂结构14与跑步机滚筒5及跑带结构6之间的联合运动。(可如附图27中所示的情况)。
130.在左、右椭圆运动手动摆臂结构14之间,一般可采用可实现相差180度的交替运动的结构设置方式,也可采用可实现相互平行等运动的结构设置方式,或者进一步可采用能够实现在相差180度的交替运动与相互平行等运动之间的联合设置与方便转换的结构方式。
131.根据需要,在滚筒皮带轮或滚筒链轮结构48与前滚筒5或前滚筒的沿出转轴42之间可设置相应的单向轴承结构,一些情况下也可以选择在曲柄皮带轮或曲柄链轮结构47与曲柄中轴结构16之间设置相应的单向轴承结构,从而可使椭圆运动手动摆臂14的运动与跑步机的前滚筒及跑带等结构的运动之间只实现单向的传动与联动,而相应的反向运动时则形成相应的脱离或分动。一般情况下,可设置成跑步机滚筒、跑带运动时,椭圆运动手动摆臂14可以实现不动,而椭圆运动手动摆臂14运动时,跑步机滚筒、跑带等一起联动。当然,通过在单向轴承等结构上进一步加设相应的离合器等结构系统,亦可实现完全的双向传动、完全的双向联合运动与可选择的单向传动、可选择的单向运动之间的联合与相互转化,从而可使整个手脚联合运动的跑步机具有更好、更丰富的运动组合形式,并使相应的运动组合的选择也更加自由。
132.根据需要,可使左、右椭圆运动手动摆臂14的上部采用可折叠或可伸缩或及使用角度可调节等的结构方式,以使其处于更适宜的运动角度或在不被使用时可实现向前方或向下方等的折叠或使长度等尺寸能够伸缩变化,从而可更好地满足运动锻炼及方便放置等的需要。(可如附图27中所示的情况)。
133.在上述相应的椭圆运动手动摆臂结构系统与跑步机结构及跑步机运动相互整合在一起,并实现相应的联动等过程的基础上,还可进一步考虑通过一些设置方式使它们与相应的健身车、椭圆机等的结构与运动之间的实现相应的整合,如可采用本人在其它的相关申请案之中所提出的使相应的健身车、椭圆机等通过设置在跑步机跑带之上的联动轮来实现相互的联动等结构方式,从而可形成椭圆运动手动摆臂结构系统及手臂的近椭圆轨迹的运动与相应的健身车运动、脚踏椭圆机运动及跑步运动乃至相应的划船、滑雪等运动之间的更丰富的相互整合,以更好地满足人们的需要。
134.具体而言,一方面,可使相应的可折叠或可伸缩等形式的健身车的车架结构51或椭圆机的骨架结构52的一端(前上端)通过相应的枢轴结构57枢接在跑步机前上部的相应
的骨架结构之上,另一方面,在健身车的车架结构51或椭圆机的骨架结构52的另一端(后下端)或适宜的位置之上设置相应的可在跑带结构6之上滚动运动的联动论结构53及鞍座结构56等,同时,通过相应的曲柄或链轮等结构使相应健身车的脚踏结构54或相应椭圆机的踏板结构55等与联动论结构53及跑步机的跑带结构6一起联动。(可分别如附图29、30或31中所示的情况)。
135.由于前述的椭圆运动手动摆臂结构14通过相应的联动结构已可与跑带结构6一起联动,故通过跑带结构6等的联系作用也可实现椭圆运动手动摆臂结构14与相应的健身车的脚踏结构54或相应椭圆机的踏板结构55之间的联动,从而可实现相应的手脚联动的健身车运动过程或手脚联动的椭圆机运动过程。当然,通过设置相应的单线轴承等单向传动结构,也可使在健身车的脚踏结构54或相应椭圆机的踏板结构55处于运动状态时,椭圆运动手动摆臂结构14既可一起运动,也可完全静止不动。
136.当要采用跑步机的运动模式时,可将上述的健身车的车架结构51或椭圆机的骨架结构52折叠或收缩后同联动论结构53等一起前移——绕相应的枢轴结构57整体翻转,并放置于跑步机前端的空白空间处,并使其对相应的跑步等运动过程不构成任何不利影响。(可分别如附图28、30或31中所示的情况)。
137.在需要的情况下,可使联动论结构53成为偏心设置的运动轮,从而使其在与跑带结构6一起运动时,能够带动鞍座结构56做相应的上下起伏运动。
138.当跑步机含电机驱动结构系统时,椭圆运动手动摆臂结构14下端直接或间接联动的曲柄皮带轮或曲柄链轮结构47也可通过相应的皮带或链条等结构与设于电机转子芯轴或其沿出的轴结构之上所设置的相应的皮带轮或链轮结构相连接与联动,由此也可实现椭圆运动手动摆臂结构14等与跑步机跑带6等结构的间接联动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

