1.本实用新型涉及智能交通教学实验装置技术领域,更具体的,涉及一种用于智能循环小车的自动灯控制装置。
背景技术:
2.在完全普及民用并完成对现有汽车的更新换代之前,人控和车控的冲突不可避免,平衡好两者间的关系是无人驾驶汽车首先需要考虑的问题。所以无人驾驶汽车除却感知装置、定位装置、规划装置和控制装置外,灯控装置亦是必须配备的基础设施。
3.自动灯控装置作为无人驾驶汽车的重要组成部分,拥有夜间照明、提示车距、辅助观察等多种作用。不同于人为控制的汽车灯组,自动灯控装置会自动判别当前的环境状况自动开启或关闭汽车灯光,做到全自动化操作。
4.而作为用于仿真沙盘的智能循迹小车,其拥有着固定的行驶线路,以微型计算机为主的智能控制系统和以zigbee无线传输为基础的通讯系统,无疑是公共交通领域无人驾驶汽车的最好缩影。并为交通专业的在校学生提供了直观的无人驾驶汽车系统组成与应用示范,可以使学生详细了解自动灯控装置在无人驾驶汽车系统中所产生的重要作用,为在校学生开展无人驾驶方面的研究与观察提供基础条件,同时也为学校的教学工作提供相应的教学设施。
5.由于目前的智能循迹小车大多采用常亮灯组或是并未安装灯组,由上位系统控制智能循迹小车的行为规范,全局交通规划通过系统统筹,而忽略了人为因素的影响,不符合实际道路交通的现状,同时亦没有具体的自动灯控解决方案。如中国专利公开号:cn107748564a,公开日:2018
‑
03
‑
02,公开了一种智能循迹小车,包括驱动底盘、车轮、核心板、充电电池、循迹板和直流电动机,驱动底盘两侧分别设有至少2个车轮,驱动底盘上安装有直流电动机,驱动底盘上分别安装有核心板、充电电池和循迹板,充电电池的充电电路包含在核心板内,核心板、循迹板与驱动底盘的驱动电路相连接,循迹板通过软排线与核心板相连接。
6.对此,针对环境、行车、安全等多方面考虑,需要为智能循迹小车设计一种自动灯控装置,以模拟智能循迹小车在真实路况环境下进行符合交通行为规范的车辆灯组自动化操作。
技术实现要素:
7.本实用新型为了解决现有的智能循迹小车没有具体的自动灯控解决方案的问题,提供了一种用于智能循迹小车的自动灯控装置,其解决了目前智能循迹小车自动灯控装置缺失的问题。
8.为实现上述本实用新型目的,采用的技术方案如下:一种用于智能循迹小车的自动灯控装置,所述的自动灯控装置用于安装在智能循迹小车上,所述的自动灯控装置包括灯组模块、检测模块、数据接口、电源接口;
9.所述的灯组模块用于安装在智能循迹小车的两侧,所述的检测模块用于安装在智能循迹小车的前端车头;
10.所述的灯组模块、检测模块分别通过数据接口与智能循迹小车的主控板连接;
11.所述的灯组模块、检测模块分别通过电源接口与智能循迹小车的电源连接;
12.当检测模块检测到数据小于预设的阈值时,所述的灯组模块进行亮灯动作。
13.优选地,所述的灯组模块包括前照灯、示宽灯、刹车灯;所述的前照灯、示宽灯均位于智能循迹小车的前端车头的两侧,所述的刹车灯位于智能循迹小车的后端车身的两侧;
14.当检测模块检测到周围环境的光线低于预设的阈值时,所述的智能循迹小车的主控板通过数据接口控制前照灯、示宽灯进行亮灯动作;
15.当检测模块检测到智能循迹小车的车身与前方障碍物的距离小于预设的阈值时,或者智能循迹小车与前方障碍物的相对距离低于预设的减速临界值时,所述的智能循迹小车的主控板通过数据接口控制刹车灯进行亮灯动作。
16.进一步地,所述的前照灯、示宽灯、刹车灯均采用led发光二极管。
17.再进一步地,检测装置包括光线检测模块、距离检测模块;
18.所述的光线检测模块、距离检测模块均与数据接口连接;
19.所述的光线检测模块用于采集周围环境的光线数据;
20.所述的距离检测模块用于智能循迹小车与前方障碍物的距离。
21.再进一步地,所述的距离检测模块设有1个,且位于智能循迹小车的前端车头;所述的光线检测模块设有2个,分别位于智能循迹小车的前端车头两侧。
22.再进一步地,所述的距离检测模块包括超声波距离检测模块、红外线距离检测模块、雷达距离检测模块几种中的一种。
23.再进一步地,所述的光线检测模块采用亮度感应器实现对环境亮度的检测,所述的亮度感应器由投光器、受光器组成,将收到光线信号转变成电信号。
24.再进一步地,所述的距离检测模块通过距离检测电路与数据接口连接;其中所述的距离检测电路包括电阻r22、电阻r21、74lvc1g芯片;
25.所述的74lvc1g芯片的a引脚、b引脚用于与距离检测模块连接;
26.所述的74lvc1g芯片的y引脚通过数据接口与智能循迹小车的主控板连接;
27.所述的74lvc1g芯片的vcc引脚接3.3v电源;
28.所述的74lvc1g芯片的gnn引脚接地;
29.所述的电阻r22的一端与74lvc1g芯片的a引脚连接,所述的电阻r22的另一端接3.3v电源;
30.所述的电阻r21的一端与74lvc1g芯片的b引脚连接,所述的电阻r21的另一端接3.3v电源。
31.再进一步地,所述的光线检测模块通过光线检测电路与数据接口连接,其中所述的光线检测电路包括电阻r1、电阻r2、可变电阻r3、可调电阻vr、放大器;
32.所述的放大器的正向输入引脚与可调电阻vr的可调引脚连接;
33.所述的可调电阻vr的一个固定引脚通过电阻r1与光线检测模块连接;
34.所述的可调电阻vr的另一个固定引脚接地;
35.所述的放大器的反向输入引脚分别与电阻r2的一端、可变电阻r3的一端连接;
36.所述的电阻r2的另一端与光线检测模块连接;
37.所述的可变电阻r3的另一端接地;
38.所述的放大器的输出引脚通过数据接口与智能循迹小车的主控板连接。
39.再进一步地,所述的放大器采用包括lm393型号、lm358型号几种中的一种。
40.本实用新型的有益效果如下:
41.1.本实用新型采用模块化设计,由灯组模块和检查模块组成完整的智能循迹小车自动灯控装置,检测模块分为光线检测模块和距离检测模块,均采用集成化设计,在不影响模块具体功能的情况下做到了产品小型化。
42.2.本实用新型所述的自动灯控装置设有数据接口、电源接口实现直接由智能循迹小车的主控板进行控制与供电,降低成本,同时如果智能循迹小车出现问题,便于查找原因以及更换备件,也加强了自动灯控装置的安全性和稳定性。
43.3.本实用新型所述的灯组模块使用的车灯均采用led发光二极管,使用寿命长,拆装简单且便于维护。
附图说明
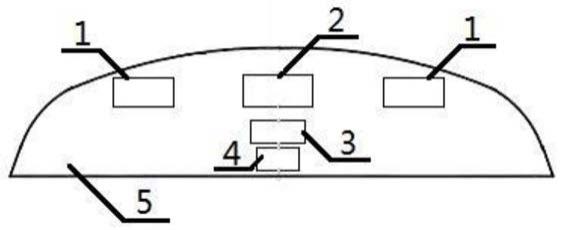
44.图1是本实施例自动灯控装置的部分结构示意图。
45.图2是本实施例所述的自动灯控装置安装在智能循迹小车上的示意图。
46.图3是本实施例所述的距离检测电路的连接示意图。
47.图4是本实施例所述的光线检测电路的连接示意图。
48.图中,1
‑
光线检测模块、2
‑
距离检测模块、3
‑
数据接口、4
‑
电源接口、5
‑
自动灯控装置、6
‑
主控板、7
‑
前照灯、8
‑
刹车灯、9
‑
示宽灯、10
‑
智能循迹小车。
具体实施方式
49.下面结合附图和具体实施方式对本实用新型做详细描述。
50.实施例1
51.如图1、图2所示,一种用于智能循迹小车的自动灯控装置,所述的自动灯控装置用于安装在智能循迹小车上,所述的自动灯控装置包括灯组模块、检测模块、数据接口3、电源接口4;
52.所述的灯组模块用于安装在智能循迹小车10的两侧,所述的检测模块用于安装在智能循迹小车10的前端车头;
53.所述的灯组模块、检测模块分别通过数据接口与智能循迹小车10的主控板 6连接;
54.所述的灯组模块、检测模块分别通过电源接口与智能循迹小车10的电源连接;
55.当检测模块检测到数据小于预设的阈值时,所述的灯组模块进行亮灯动作。
56.本实施例也可以单独设置电源向灯组模块、检测模块提供所需的电源,同理,也可以单独设置主控板控制灯组模块、检测模块进行相应的动作。为了节省成本,所以通过智能循迹小车10的电源、主控板提供电源和控制灯组模块、检测模块。
57.在一个具体的实施例中,所述的灯组模块包括前照灯7、示宽灯9、刹车灯 8;所述的前照灯7、示宽灯9均位于智能循迹小车10的前端车头的两侧,所述的刹车灯8位于智能循
迹小车10的后端车身的两侧;
58.当检测模块检测到周围环境的光线低于预设的阈值时,所述的智能循迹小车 10的主控板通过数据接口控制前照灯7、示宽灯9进行亮灯动作;
59.当检测模块检测到智能循迹小车10的车身与前方障碍物的距离小于预设的阈值时,或者智能循迹小车10与前方障碍物的相对距离低于预设的减速临界值时,所述的智能循迹小车10的主控板6通过数据接口3控制刹车灯8进行亮灯动作。
60.在一个具体的实施例中,所述的前照灯7、示宽灯9、刹车灯8均采用led 发光二极管。
61.再进一步地,检测装置包括光线检测模块1、距离检测模块2;
62.所述的光线检测模块1、距离检测模块2均与数据接口3连接;
63.所述的光线检测模块1用于采集周围环境的光线数据;
64.所述的距离检测模块2用于智能循迹小车与前方障碍物的距离。
65.在一个具体的实施例中,所述的距离检测模块2设有1个,且位于智能循迹小车10的前端车头;所述的光线检测模块1设有2个,分别位于智能循迹小车 10的前端车头两侧。
66.在一个具体的实施例中,所述的距离检测模块2包括超声波距离检测模块、红外线距离检测模块、雷达距离检测模块几种中的一种。
67.在一个具体的实施例中,所述的光线检测模块1采用亮度感应器实现对环境亮度的检测,所述的亮度感应器由投光器、受光器组成,将收到光线信号转变成电信号。
68.在一个具体的实施例中,所述的距离检测模块2通过距离检测电路与数据接口连接;如图3所示,其中所述的距离检测电路包括电阻r22、电阻r21、74lvc1g 芯片;
69.所述的74lvc1g芯片的a引脚、b引脚用于与距离检测模块连接;
70.所述的74lvc1g芯片的y引脚通过数据接口与智能循迹小车的主控板连接;
71.所述的74lvc1g芯片的vcc引脚接3.3v电源;
72.所述的74lvc1g芯片的gnn引脚接地;
73.所述的电阻r22的一端与74lvc1g芯片的a引脚连接,所述的电阻r22的另一端接3.3v电源;
74.所述的电阻r21的一端与74lvc1g芯片的b引脚连接,所述的电阻r21的另一端接3.3v电源。
75.在一个具体的实施例中,所述的光线检测模块1通过光线检测电路与数据接口3连接,如图4所示,其中所述的光线检测电路包括电阻r1、电阻r2、可变电阻r3、可调电阻vr、放大器;
76.所述的放大器的正向输入引脚与可调电阻vr的可调引脚连接;
77.所述的可调电阻vr的一个固定引脚通过电阻r1与光线检测模块连接;
78.所述的可调电阻vr的另一个固定引脚接地;
79.所述的放大器的反向输入引脚分别与电阻r2的一端、可变电阻r3的一端连接;
80.所述的电阻r2的另一端与光线检测模块连接;
81.所述的可变电阻r3的另一端接地;
82.所述的放大器的输出引脚通过数据接口与智能循迹小车的主控板连接。
83.在一个具体的实施例中,所述的放大器采用包括lm393型号、lm358型号几种中的
一种。
84.本实施例的工作原理如下:
85.当智能循迹小车10启动后,智能循迹小车的主控板6通过数据接口下发信号启用安装于智能循迹小车10的前端车头处的光线检测模块1和距离检测模块 2。
86.所述的智能循迹小车的光线检测模块1和距离检测模块2会实时采集环境数据,并把数据回传至智能循迹小车的主控板6进行处理判断。当光线检测模块1 会检测智能循迹小车10周边的光线明暗程度并回传数据至智能循迹小车的主控板6,可以设置以每五分钟内的光线明暗程度为一个阶段数据,通过五分钟内的低于临界值光线亮度在其中所占的比重判断是否开启前照灯7和示宽灯9。如果环境光线低于程序设定的临界值时,智能循迹小车的主控板6通过后数据接口下发信号点亮前照灯7和示宽灯9,当环境光线高于程序设定的临界值时智能循迹小车的主控板6通过数据接口下发信号关闭前照灯7和示宽灯9。
87.在智能循迹小车10行驶时,智能循迹小车的主控板6会启用安装于前端车头处的距离检测模块2会实时采集环境数据,根据与前方障碍物(前车或者前方物体)的相对距离判断是否减速并点亮刹车灯8。当智能循迹小车10前方存在物体时,所述的距离检测模块2会实时返回两者相对距离信息至智能循迹小车主控板6,如果两者相对距离低于减速临界值,则智能循迹小车10减缓车速,同时点亮车后的刹车灯8,提醒后方来车注意避让。或者两者距离低于停车临界值,则智能循迹小车10会立即刹车,同时刹车灯8长亮。
88.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。