1.本技术涉及一种具有传感器的设备、控制器以及相应的方法。在此,一些实施方式涉及这种设备与控制器借助于脉宽调制信号的通信。
背景技术:
2.具有传感器的设备、在下面也被称为传感器设备,被用于获取一个物理参量或多个物理参量。对此的示例是磁场传感器、压力传感器、温度传感器、电流传感器、电压传感器等等。在多数系统中,表示所获取的物理参量的信号被传输至控制器,该控制器对如此得到的、关于一个或多个所获取的参量的信息进行进一步处理。对此的示例是汽车应用,其中借助于车辆中的多个传感器来获取数据,例如轮转速、轮胎压力、温度等等,并且之后将如此获取的信息从传感器设备传输至一个或多个控制器、通常被称为ecu(电子控制单元electrical control unit)。
3.针对这种传输,从相应的传感器获取的参量必须被变换成对应的电信号,然后传输这些电信号。对此的方法是脉宽调制(pwm),在其中传输信号脉冲,其中按照脉冲时长与总循环长度或与脉冲间隔之例,占空比(英语:duty cycle)与信号值相对应。例如,用于传输可以具有28‑
1=255个不同值的8位信号的脉冲,可以使用可以具有255个不同脉冲持续长度的脉冲,例如根据编码值而具有1至255个时间单位。
4.针对基础的时钟信号的固定频率,该时钟信号确定脉宽调制信号的时间单位,高分辨率导致低传输率或者低分辨率导致高传输率。例如,利用8mhz的时钟信号,时间单位的长度为125ms。针对14位的分辨率,则对于脉宽调制信号的一个循环需要2
14
‑
1个时钟循环,这对应于2047ms的传输信息的循环时长。在分辨率为8位时,28‑
1个时钟循环相应地需要232μs的脉宽调制信号的循环时长。作为频率,这对应于大约30khz而不是在14位分辨率的情况中的大约500hz。
5.脉宽调制信号的循环(也被称为pwm时长)在此基本上被理解为对于一个最大时长的脉冲所需要的时间,例如对于14位分辨率的2
14
‑
1个时钟循环,或对于8位分辨率的28‑
1个时钟循环。在一个循环之内,脉宽调制信号在某个第一持续时间中处于第一状态、例如“高”(例如第一电压、第一电流),并且在在第二持续时间中处于第二状态(例如第二电压、第二电流)、例如“低”,并且占空比(第一状态的时长与一个循环的时长的比例)指示利用相应的脉冲被编码的值。在循环时长固定且已知的情况下,同样的信息也存在于第一状态的时长中、第二状态的时长中或它们的比例中。第一状态的时长(例如信号在高电平时的时间)在下面也被称为脉冲时长。
6.在一些应用中,例如对系统进行调节的应用中,不仅需要用于精确调节的高分辨率,还需要高更新率以便能快速响应于物理参数的突然改变。
技术实现要素:
7.在此提供了一种根据本发明的设备、控制器以及方法。
8.根据一个实施例,提供了一种设备,其包括传感器,传感器被配置为输出模拟传感器信号。设备还包括模数转换器装置,其被配置为将模拟传感器信号转换为∑
‑△
调制的、具有n位位宽的第二数字信号,设备还包括脉宽调制器,其被配置为基于第二数字信号生成脉宽调制信号。
9.根据一个实施例,提供了一种控制器,其包括:输入端,用于从传感器设备接收脉宽调制信号;以及处理电路,其被配置为,基于在脉宽调制信号的k个循环期间求平均来生成第一数字接收信号,其中k大于或等于2。
10.根据另一个实施例,提供了一种方法,其包括:基于模拟传感器信号生成具有n位位宽的、∑
‑△
调制的第二数字信号,以及基于第二数字信号生成脉宽调制信号。
11.另外,还提供了一种方法,其包括:从传感器设备接收基于∑
‑△
调制信号所生成的脉宽调制信号,以及基于在脉宽调制信号的k个循环期间求平均来生成第一数字信号,其中k大于或等于2。
12.上述发明内容仅提供了关于一些实施例的概述,并且不应被理解为具有限制性。
附图说明
13.图1是根据一个实施例的系统的框图。
14.图2是根据一个实施例的设备的一部分的图。
15.图3示出用于阐述实施例的示例信号。
16.图4示出用于阐述实施例的另外的示例信号。
17.图5示出根据一个实施例的设备的一部分。
18.图6说明根据一些实施例的斩波的应用。
19.图7示出用于阐述一些实施例的信号。
20.图8示出根据一个实施例的系统的图。
21.图9是一些实施例的一部分的框图。
22.图10示出用于阐述图9的实施例的示例信号。
23.图11示出根据一些实施例的具有电流接口的系统。
24.图12示出根据一些实施例的用于说明方法的流程图。
25.图13示出用于将一些实施例与传统方法进行对比的模拟结果。
26.图14是根据一个实施例的系统的框图。
27.图15是根据一个实施例的系统的框图。
具体实施方式
28.在下面将更详细地阐述一些实施例。这些实施例用于说明并且不被理解为具有限制性的。如此地描述了具有多个特征(例如组件、元素、工序等等)的一些实施例。在其他的实施例中,这些特征中一些特征可以被省去,和/或由备选的特征替代。另外,除了明确地描述的特征外,还提供了其他特征,例如在传统传感器设备和控制器中使用的特征。
29.除非另有说明,否则本文所述或附图中所示的连接或耦合是电连接或电耦合。只要不显著影响连接或耦合的基本功能,例如信号的传输、信息的传输等等,就可以例如通过添加组件或省去组件来修改这种连接或耦合。
30.除非另有说明,否则不同实施例的特征可以彼此组合。针对实施例之一描述的变型或修改也可以应用于其他实施例,并且不再重复描述。
31.在附图中,相同的元件由相同的附图标记表示,因此也不再重复详细说明。
32.本说明书中指定的数值和信号曲线仅用于说明,并且不应理解为具有限制性的,因为这种数值和信号曲线可以根据实现方式而变化。
33.图14是根据一个实施例的设备的框图。图14的系统包括传感器设备140和控制器16。在一些实施例中,传感器设备140可以集成在第一芯片上,并且控制器16可以集成在第二芯片上。在另外的实施例中,传感器设备140还可以设计具有多个芯片,然后这些芯片例如可以布置在相应的封装中。
34.传感器设备140将信号发送给控制器16,该信号承载有关于由传感器设备140的传感器11获取的物理参量的信息。在下面讨论的各种实施例主要涉及由传感器设备(如传感器设备140)来生成这种信号以及该信号在控制器(如控制器16)中的处理。
35.在图14的实施例中,传感器11是霍尔传感器形式的磁场传感器。这仅用于说明,并且还可以使用其他类型的传感器。例如还可以使用其他类型的磁场传感器,诸如根据磁阻效应的传感器,例如基于巨磁阻(gmr)、基于隧道磁阻(tmr)或基于各向异性磁阻(amr)的传感器。这些传感器还被统称为xmr传感器。磁场传感器例如被用于车辆应用中,以便通过由转动生成变化的磁场的方式来测量转速。与磁场传感器不同的其他类型的传感器也可以被用作传感器11,例如温度传感器、压力传感器、电流传感器、电压传感器或用于测量机械应力的传感器。在设备10中还可以提供多个传感器、以及各种类型的传感器。
36.传感器11输出表示所获取的物理参量的模拟输出端信号。在传感器设备140中,借助于模数转换器装置141将该模拟传感器信号转换为∑
‑△
调制的第二数字信号s2,其具有n位位宽。在此,n大于或等于1,例如n至少为2,例如8或更大。
37.∑
‑△
调制信号在此被理解为借助于∑
‑△
模数转换器或数字的∑
‑△
调制器生成的信号,并且其中通过在时间上平均而可以达到高于位宽n的分辨率。这决定了:即使在模拟传感器信号恒定的情况下,第二数字信号s2的值、尤其是第二数字信号s2的最低有效位的值也可以随时间变化。因此,通过在时间上平均,可以达到大于最低有效位的值的分辨率。例如针对两种备选方案,进一步在下面阐述∑
‑△
模数转换器或者数字∑
‑△
调制器。
38.第二数字信号s2被输送给脉宽调制器14,其基本上具有计数器。针对待生成的脉中宽度调制信号的每个周期,计数器可以进行计数,直至达到由第二数字信号s2表示的值,并且脉宽调制器14输出第一值。如果达到第二数字信号s2的值,则例如针对脉宽调制信号的其余循环输出第二值。因此,所输出的第一值的数量表示第二数字信号s2的值。需要注意的是,数字的∑
‑△
调制器13和脉宽调制器14不必作为单独的装置来实现,而是可以在共同的数字电路中、例如借助于数字信号处理器等等实现。
39.如此利用∑
‑△
调制生成的脉宽调制信号也可以被称为分数脉宽调制信号。
40.由脉宽调制器14输出的信号spwm被输送至接口15,接口由此生成在传输线路上的脉宽调制信号。例如,接口15可以是电压接口,如推挽接口、开漏接口或lvds(低压差分信号)接口,电压接口在信号spwm位于上面所提到的第一值期间输出第一电压,并且当信号spwm位于第二值时输出第二电压,在使用电压接口的情况中,在此可以实现所谓的比率计量信号,其中脉冲时长与供电电压无关。脉宽调制信号的幅值在该情况下与供电电压成比
例,使得在可能的随后的模拟低通滤波中(如之后所阐述的),由脉宽调制信号得出的平均值与供电电压成比例=按比率计量,并且可以被输送至具有模数转换器输入端的控制器,该模数转换器输入端的参考也与供电电压成比例。在另外的实施例中,接口15还可以是电流接口,如之后参照图11再详细阐述的那样。
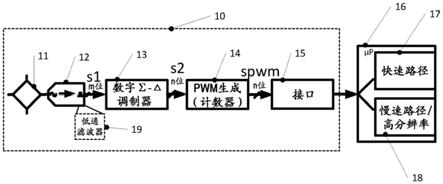
41.由接口15发送的信号被控制器16接收。控制器16可以包括例如微控制器、微处理器或其他处理组件,从而对所接收的信号进行评估。在图1的实施例中,控制器16在此具有用于评估所接收的信号的快速路径17和慢速路径18。高分辨率的慢速路径在此评估在脉宽调制信号的多个循环期间所接收的信号以提高分辨率,并且在循环的数量足够的情况下,最终重新获得如第一数字信号那样具有m位分辨率的信号。在多个循环期间进行的评估可以通过在多循环期间求平均来实现。
42.快速路径17评估较少的循环,例如只评估一个循环,从而实现高更新率。因此,可以借助于快速路径17检测由传感器11所获取的物理参量的突然改变,而慢速路径18提供高分辨率。在此应注意,为了检测快速变化,通常不需要高分辨率,因为在低分辨率的情况中也可以良好地检测到剧烈的快速变化。对于在多个循环期间的评估以及在一个循环期间的评估的示例,同样会稍后更详细地阐述。
43.图15示出具有传感器设备150的系统的一个实施例,传感器设备具有图14的模数转换器装置141的可行实现方案,该模数转换器装置具有∑
‑△
模数转换器151和数字低通滤波器152。不考虑这些,图15的系统对应于图14的系统,并且传感器设备150对应于传感器设备140,并且不再阐述其余的组件。
44.∑
‑△
模数转换器151从传感器11接收模拟传感器信号并且输出1位电流。∑
‑△
模数转换器151可以是一阶转换器或更高阶的转换器。
45.由数字低通滤波器152对1位电流进行滤波,以生成具有位宽n的第二数字信号s2。在此,在滤波中,例如通过利用较高界限频率进行滤波,使得n在基于1位电流可达到的最大分辨率之下。通过对第二数字信号的多个值求平均,则可以达到该最大分辨率(不考虑噪声作用等等),使得如此生成的第二数字信号是上述意义中的∑
‑△
调制信号。
46.图1示出具有传感器设备10的系统的一个实施例,传感器设备具有图14的模数转换器装置141的可行实现方案,该模数转换器装置具有模数转换器12和数字∑
‑△
调制器13。不考虑这些,图1的系统对应于图14的系统,并且传感器设备10对应于传感器设备140,并且不再阐述其余的组件。
47.在传感器设备10中,借助于模数转换器12将模拟传感器信号转换为第一数字信号s1,其具有m位的位宽,其中m是大于1的整数。典型地,m可以在8和16之间,例如等于12或14。m越高,由模数转换器12输出的第一数字信号的分辨率就越高。
48.模数转换器12可以直接生成具有m位位宽的第一数字信号s1。在另外的实施例中,在模数转换器的输出端处可选地有数字低通滤波器19连接在模数转换器12下游,数字低通滤波器将模数转换器12的输出提高至m位位宽。例如,在这种的情况中,模数转换器12可以是生成1位电流的1位∑
‑△
模数转换器,并且数字低通滤波器19可以对该1位电流进行滤波,以便生成具有m位位宽的第一数字信号。普遍地,每种由模拟传感器信号生成具有m位位宽的第一数字信号s1的装置都可以被使用。
49.第一数字信号s1然后被输送给数字∑
‑△
调制器13。数字∑
‑△
调制器13基于第一
数字信号s1生成具有n位位宽的第二数字信号s2,其中n是大于m的整数。∑
‑△
调制器在此是如下的装置,其由具有m位位宽的信号生成具有n位位宽的信号,其中从在∑
‑△
调制器的前馈信号路径中的信号中减去至少一个反馈偶合信号。这种数字∑
‑△
调制器基本上如∑
‑△
模数转换器那样构建,其中输送数字输入端信号而不是模拟输入端信号。稍后阐述示例。即使m位位宽被降低至n位,第一数字信号s1的信息在原理上仍存在于第二数字信号s2中。当生成具有恒定值的第一数字信号s1时,第二数字信号s2在多个值上的平均值对应于由第一数字信号s1表示的值。这决定了:在可以不精确地由具有n位的第二数字信号来映射的第一数字信号s1恒定时,第二数字信号s2的值在即使第一数字信号恒定的情况下也发生变化。这也在稍后借助于示例来进行阐述。n例如可以大于6,并且m与n之差可以例如在2和12之间。在一个实例中,其中m是14,n例如可以等于12、等于10或等于8。随后如针对图14所描述地,进一步处理第二数字信号s2。
50.图2示出针对一阶的数字∑
‑△
调制器20的一个示例,该数字∑
‑△
调制器可以例如作为数字∑
‑△
调制器13被用在传感器设备10中。数字∑
‑△
调制器20在累加器21的正输入端处接收第一数字信号s1。累加器21输出具有n位位宽的第二数字信号s2。另外,具有一个时钟的延迟22的信号s2反耦合至累加器21的负输入端。因此使由累加器21输出的信号s2提高或降低了先前时钟脉冲周期的信号s1和信号s2之差。一般地,累加器21根据其输入端信号的差来改变由其输出的信号。然后第二数字信号s2被输送给已经讨论过的脉宽调制器14。然而如稍后将阐述地,也可以使用更高阶的∑
‑△
调制器。
51.下一步,参照图3和图4更详细地阐述脉宽调制信号的生成及其在控制器中的评估。
52.图3示出针对脉宽调制信号32的示例,其例如利用图1和图2的脉宽调制器14生成,并然后可以由图1的接口15输出。在图3的示例中完整地示出了脉宽调制信号32的4个循环31a至31d以及部分地示出了第五个循环31e。
53.在图3的示例以及还有后续的图4的示例中假定,在此信号s1是恒定的,其被输送给数字∑
‑△
调制器,如图1的∑
‑△
调制器13或图2的∑
‑△
调制器20。
54.第二数字信号s2的n
‑
1个最高有效位在此对应于第一数字信号s1的n
‑
1个最高有效位,其中当第一数字信号s1的m
‑
n个最低有效位不为零时,即使第一数字信号s1恒定,第二数字信号s2的最低有效位也是随时间变化的,从而第二数字信号s2的值平均对应于第一数字信号s1的值。
55.为了说明这种效果,在图3和图4的示例中假定,第一数字信号s1的m
‑
n个最低有效位不为零。
56.在脉宽调制信号32中,脉冲时长(在该脉冲时长期间脉宽调制信号32位于高电平上)表示第二数字信号s2的相应值。由于第一数字信号s1的m
‑
n个最低有效位不为零,那么即使第一数字信号s1恒定,该脉冲时长在此也不恒定。这在图3中在循环31c中示出,其中脉冲时长被提高了一个持续时间33。
57.通过在多个循环期间求平均,如在图3中由括号34a表示的那样,则可以重构第一数字信号s1的值。为了精确地重构第一数字信号s1的值,必须在一定数量的循环期间平均(假设第一数字信号s1恒定),该循环的数量在此与m和n的差别相关。该差别越大,越多的循环就必须被平均。具体地,在此,需要在2
m
‑
n
个循环期间平均。然而也可以在较少循环期间平
均。
58.在控制器中执行这种求平均,例如在图1的控制器16的慢速路径18中执行。在一些实施例中,求平均可以连续进行,从而在四个循环34a之后得到在随后的四个循环期间的平均值,如通过括号34e表示的那样。在其他的实施例中,求平均可以滑动地(gleitend)进行,如通过括号34b至34d表示的那样。在此,使用滑动求平均的优点在于较高的更新率,其对应于循环31a至31e的持续时间之逆。通过求平均,在此还可以进行固有的低通滤波,使得第一数字信号s1的突然变化仅逐渐地在通过求平均而得出的值中反映出来。这种求平均可以在控制器16中通过数字滤波、例如借助于无线脉冲响应(iir)滤波器、借助于有限脉冲响应(fir)滤波器、借助于级联积分梳状滤波器(cic
‑
filter)或者借助于数字低通滤波器来进行,其中边沿坡度匹配于期望的求平均。
59.为了可以快速响应传感器的输出端信号的突然变化以及因此在第一数字信号s1中的突然变化,在控制器16的快速路径17中实施对各个循环31a至31e的评估。可替代地,也可以在少于慢速路径18中循环的循环期间平均,例如在图3的示例中在两个循环期间。
60.图4示出与图3中的脉宽调制信号32相似的脉宽调制信号42,其具有多个循环40a、40b、40c、40d
……
。在图4的示例中,第二数字信号s2是10位信号,具有2
10
=1024个不同的脉冲时长,从0至1023个时间单位。另外,在图4的示例中,第一数字信号s1是12位信号,从而m
‑
n=2。
61.在该示例中,据此需要在2
12
‑
10
=4上进行平均,以便正确地重构第一数字信号s1的值。
62.在图4的示例中,第一数字信号的最低有效的两位例如具有值01。这使得,在脉宽调制信号42的四个连续的循环中,在一个循环中脉冲时长延长了一个单位。在图4的示例中,在循环40a、40b、40d中的脉冲具有(最多1023个时间单位中的)666个时间单位的长度,而在循环40c中的脉冲具有667个时间单位的时长。通过在四个循环40a至40d期间平均,则可以重构第一数字信号s1。通过对各个循环进行评估,可以在另外一方面如所阐述地快速检测由传感器获取的物理参数以及第一数字信号s1的变化。
63.如已经参照图3所阐述地,求平均在此可以“逐段地”分别在四个连续的循环期间进行,如由括号41b所表示,或者通过滑动求平均来进行,如由括号41c所表示。
64.在图2中,示出了针对一阶∑
‑△
调制器的示例。但也可以使用其他阶的、尤其更高阶的∑
‑△
调制器。针对二阶∑
‑△
调制器50的示例在图5中示出。应注意的是,虽然示出了具有分立器件的∑
‑△
调制器50,这些器件例如可以借助于数字信号处理器或其他合适的数字电路实现。
65.∑
‑△
调制器50在减法器51的第一正输入端处接收第一数字信号s1。第一减法器51的输入端被引导至具有至少m位宽度在此以符号d触发器表示的第一数字存储器52的数据输入端d。这样的存储器可以例如由多个、例如至少m个d触发器来实现。也可以使用其他的存储器,例如ram存储器。
66.第一数字存储器52的数据输出端q被引导返回至第一减法器的第二正输入端并且还与第二减法器53的第一正输入端连接。第二减法器53的输出端与第二数字存储器54(再次以符号d触发器表示,用于第一数字存储器52的实施方式在此相应地适用)的数据输入端d连接。第二数字存储器54的数据输出端q被引导返回至第二减法器53的第二正输入端。数
字存储器52、54分别将在其数据输入端d处施加的信号通过(未示出的)时钟信号控制地输出至其相应数据输入端q,该时钟信号位于数字存储器的时钟输入端。
67.第二数字存储器54的数据输出端q被引导至截止器55,截止器将输送给它的信号的m个最高有效位作为信号s2输出。然后在乘法器56中利用第一权重因数c1对信号s2进行权重,并且将其输送至第一减法器41的负输入端,并且在乘法器57中利用第二权重因数c2对信号进行权重并将其输送至第二减法器53的负输入端。
68.信号s2然后还被附加地输送至已经讨论的脉宽调制器14。
69.在一个实施例中,对于∑
‑△
调制器50,第一数字信号s1的位宽n可以等于14,并且第二数字信号s2的位宽可以等于8。同样,其他数值也是可以行的,其中第二数字信号s2的位宽通过由截止器55截止的位的数量来设定。
70.在这种方法中的信噪比snr为
[0071][0072]
在此,or是过采样率(oversampling rate),b是信号s2的位宽,并且l是∑
‑△
调制器的阶数。在上面n=14以及m=8的示例中,例如可以利用∑
‑△
调制器50来生成具有30khz的更新率的8位pwm信号。利用一阶∑
‑△
调制器,可以通过平均,在接收器中、例如在控制器16中,生成具有大约2.7khz的更新率的高分辨率的14位信号,在二阶∑
‑△
调制器中生成具有大约7.5khz的更新率的信号。在阶数更高的情况中具有较高的更新率的原因在于,脉冲时长的变形(例如图3的33)在较高阶的调制器中更好地分布在信号上。
[0073]
在一些实施例中,被用于对传感器信号进行模数转换的模数转换器(例如模数转换器12)可以配备有斩波器装置,以便使模数转换器的偏置(offset)最小化。对此使用的斩波器信号可以与脉宽调制信号的循环同步。对此的示例将参照图6和图7来阐述。
[0074]
图6示出图1的实施例中的传感器11和模数转换器12。如已经参照图1所提到的那样,传感器11在示出的示例中是霍尔传感器。在图6的示例中,传感器11利用所谓的自旋电流技术来运行。在此在一个端子处,来自电流源60的偏置电流被输送至霍尔传感器11,同时相对置的端子与地61连接。在两个另外的端子处量取霍尔电压。针对自旋电流技术,现在如在图6中由虚线所示,将用于输送偏置电流的端子和用于量取霍尔电压的端子互换,这可以减小传感器11的偏置。由于在此涉及本身已知的技术,就不再详细地阐述该技术了。然而如已经参照图1所提到的那样,可以使用其他种类的传感器。
[0075]
在模数转换器12的输入端提供了第一斩波器装置63,并且在模数转换器12的输出端提供了第二斩波器装置64。斩波器装置63、64分别以斩波器频率fchop运行。模数转换器12以频率fclock
adc
运行。斩波本身可以
‑
不考虑之后阐述的与脉宽调制信号的同步
‑
以各种传统的方式实现,并且用于至少部分地补偿模数转换器12的偏置。
[0076]
在图7中,曲线70示出针对时钟信号fclock
adc
的示例,曲线71示出针对斩波器频率fchop的示例,并且曲线72示出针对脉宽调制信号spwm的示例,脉宽调制信号如所阐述的并由74所表示的那样即使在信号s1恒定的情况下也可以具有可变的脉冲时长。在图6和图7的实施例中,斩波器频率fchop和脉宽调制信号spwm进行同步,使得在根据曲线72的脉宽调制信号的每个循环中存在斩波器频率fchop的整数个周期,并且根据曲线72的脉宽调制信号
的一个循环的开端和末端随斩波器频率fchop的边沿、在图7的示例中的下降沿而发生,如由虚线73所表示的那样。通过斩波器频率fchop与脉宽调制信号spwm的这种同步,能够抑制所谓的互调作用,即干扰信号,在该干扰信号的情况中,斩波器波纹(与频率fchop的正或负的偏置)可能在信号spwm中产生拍频效应。但是在另外的实施例中,也可以省去斩波或将其与脉宽调制信号spwm同步。
[0077]
在上面讨论的实施例中,在控制器16中进行求平均,例如在控制器16的一个数字部件中。在其他实施例中,可以进行模拟低通滤波来求平均。相应的实施例在图8中示出。
[0078]
图8示出具有传感器设备80和控制器81的系统。传感器设备80以上面描述的方式输出脉宽调制信号84,即基于用于降低位宽的∑
‑△
调制器的输出端信号的脉宽调制信号。
[0079]
在图8中的曲线84中示出针对这样的脉宽调制信号的示例。
[0080]
在信号84的情况下,脉冲时长在所示出的时间段结束时减小,这例如可以对应于由传感器设备80获取的物理参量的较小值。
[0081]
脉宽调制信号84被输送至模拟低通滤波器82。在图8的示例中,低通滤波器82具有两个电阻和两个电容器。然而这只是示例,并且低通滤波器的其他实现方案也是可行的。
[0082]
以这种方式产生模拟信号,其中通过低通滤波似乎在脉宽调制信号的多个循环期间求平均。与曲线84匹配的曲线85示出了针对这种模拟信号的示例,即当脉冲时长减小时,模拟信号85降低,其中由于低通滤波而存在有相对慢速的下降(与低通滤波器的时间常数有关)。该信号然后被输送至控制器81的模数转换器输入端,并且进行进一步处理。通过对脉宽调制信号84的低通滤波,在此
‑
根据上面所描述的求平均
‑
提高了分辨率。
[0083]
另外如由虚线部分83表示的那样,脉宽调制信号可以可选地被输送至控制器81的数字输入端,例如以便对脉宽调制信号的各个循环进行评估并且由此形成如图1的快速路径17那样的快速路径,其中可能的是,基于低通滤波的时间常数,比通过低通滤波的模拟信号更快地获取剧烈变化。
[0084]
在前面描述的实施例中,由传感器获取物理参量并且所获取的参量最后以脉宽调制和编码的方式进行传输。在一些实施例中,可以借助于脉冲编码调制在这些脉宽调制信号上传输另外的信息。这种另外的信息可以例如是由另外的传感器设备获取的另外的物理参量。现在参照图9和图10来阐述对此的示例。
[0085]
图9是根据一个实施例的传感器设备的一部分的框图。在此,已经讨论的第二数字信号s2被输送给脉宽/脉冲编码调制器90,该第二数字信号如上所阐述地借助于∑
‑△
调制由第一数字信号生成。另外,另外的传感器装置91生成另外的物理参量,并且提供相应的数字信号s3。另外的物理参量可以是其他物理参量,其不同于此外由传感器设备例如借助于所讨论的传感器11获取的物理参量。另外的物理参量例如可以是温度。在其他实施例中,另外的物理参量可以是与通常由传感器设备获取的物理参量相同的物理参量,从而提供冗余性。除了另外的传感器,另外的传感器装置91例如也可以包括另外的模数转换器,从而第三信号s3可以是数字信号。
[0086]
基本如上所描述地,脉宽/脉冲编码调制器90基于第二数字信号s2生成脉宽调制信号。然而与上面的实施例不同的是,现在额外地,脉宽调制信号的循环的一个时长以脉冲编码调制的形式基于第三数字信号s3改变。例如为了对第三信号s3进行编码,第一循环长度可以意味着逻辑零,并且第二循环长度意味着逻辑一,从而例如可以在四个循环期间传
输一个4位值。
[0087]
在图10中示出针对这样组合的脉宽调制和脉冲编码调制的示例。如在图3和图4所示的那样,在此假定第一数字信号s1恒定,其中为了进行说明,该第一数字信号s1具有与在图4的示例中相同的值。
[0088]
图10示出了在四个循环104a至104d期间的组合的脉宽调制/脉冲编码调制信号103。在循环104a、104c和104d中,每个循环的长度如在图4的示例中那样具有1023个时间单位,其中对应于图4,在循环104a和104b中脉冲时长为666个时间单位(对应于图4的循环40a和40b),并且在循环104c的情况中,脉冲时长为667个时间单位(如在图4的循环40c中那样)。循环104b的长度为1279个时间单位,并且脉冲时长为832个时间单位,这基本上(在由时间单位的数量决定准确度的范畴中)对与在循环104a和104d(以及在图4的循环40b)中的脉冲相同的值进行编码。
[0089]
因此,可以如上所述地对脉宽调制信号进行解码。还可以如由括号105a表示的那样,在多个循环(在该情况中为四个循环)期间求平均值。这可以连续地重复进行,如由括号105b表示的那样,或者通过滑动求平均来进行,如由虚括号105c所表示的那样,并且如同样已经在上面阐述的那样。此外,在接收信号103的控制器(例如图1的控制器16或图8的控制器81)中,在第二传感器解码器100中对信号进行评估。该第二传感器解码器100可以通过对相应的控制器的数字信号处理进行对应编程来实现。这里,如由括号101a至101d表示的那样对循环的时长进行评估。在此,1023个时间单位的时长例如可以表示逻辑零,并且1279个时间单位的时长可以表示逻辑一,从而在所示出的示例中,经由四个循环传输了值“0100”。视第三信号s3的传输所需要的分辨率而定,还可以使用更多或更少的循环。在此,更大数量的循环对应于更高的分辨率,同时传输率更低。
[0090]
可替代地或附加地,一定范围的脉冲时长可以被设置用于传输额外的信息,例如状态信息。这些范围可以在短和/或长的脉冲时长的范围中。于是,对于10位信号的循环的时长可以不包括1023个时间单位,而是例如包括1123个时间单位。为了如上所述有规则地传输信号s2,使用在50和1073个时间单位之间的脉冲时长。在0和49个时间单位之间的脉冲时长可以例如显示出第一类型错误,并且在1074和1123个时间单位之间的脉冲时长可以指示第二类型错误。
[0091]
如参照图1所阐述的那样,可以使用多种类型的接口15,尤其是多种类型的电压接口,其中脉宽调制信号例如使用两个不同的电压。如同样已经提到的,也可以使用电流接口。针对电流接口的示例在图11中示出。
[0092]
图11的系统包括具有电流接口的传感器设备110,传感器设备包括第一电源113、第二电源114和开关115。由脉宽调制器、例如前述实施例的脉宽调制器14生成的信号spwm控制开关115。相应地,由传感器设备输出电流i
传感器
,其在第一电流电平i1与第二电流电平i1 i2之间变化。图11的曲线117示出了这种电流i
传感器
随时间的示例。
[0093]
利用控制器111的供电电压vddμp给电流镜112供电,电流i
传感器
经由该电流镜被反射成相应地具有两个不同电流电平的电流i
镜
,并且被输送至电阻116,电压vcomp在该电阻处下降。如作为示例借助于图11的曲线118所示的那样,电压vcomp在两个电压值v1和v2之间变化,并且然后可以被输送至控制器111,并且在该处如已经讨论的那样进行处理。
[0094]
图12示出根据一个实施例的方法。图12的方法可以借助于上面讨论的系统和设备
实现,并且为了避免重复将参照它们进行描述。多种上面描述的变体方案(例如额外地使用脉冲编码调制)都可以被用于图12的方法。然而,图12的方法也可以利用与所描述的不同的设备来执行。
[0095]
在121中,方法包括基于模拟传感器信号生成∑
‑△
调制的第二数字信号。对此的示例是如上所述的生成第二数字信号s2。因此,这种生成可以如下进行:如在图15中通过模拟∑
‑△
模数转换,随后是数字低通滤波;或者如图1通过模数转换、随后是数字∑
‑△
调制。
[0096]
在122中,方法包括如上所述地基于第二数字信号生成脉宽调制信号。
[0097]
然后可以例如由传感器设备将脉宽调制信号传输至控制器。在123中,然后例如在控制器中接收脉宽调制信号。在124中,如上所述地在脉宽调制信号的多个循环期间执行求平均,以获得具有高分辨率的信息。另外在125中,还可以根据例如图1的快速路径17基于一个或少较少的循环快速地更新所接收的信号。
[0098]
利用这样的方法,不仅可以在控制器中对由传感器设备获取的参量进行快速更新(在125中),还可以获得具有高分辨率的所获取的参量(通过在124中求平均)。
[0099]
为了进一步说明,图13示出针对不同的实施例和对比示例的模拟结果。在此,在图13中关于以赫兹为单位的可实现更新率标记出可实现的分辨率。曲线130示出伴随使用二阶∑
‑△
调制器的实施例的特性,而曲线131示出针对使用一阶∑
‑△
调制器的实施例的特性。在这两种情况中,可以通过应用慢速路径和快速路径如所阐述地同时提供高分辨率和高更新率,其中慢速路径利用了求平均。虚线示出多个传统的方法。在此,无法在大范围内在同时高分辨率的情况下还获得高更新率,并且相应的系统必须在相应于高分辨率的较长pwm循环与相应于高更新率的较短pwm循环之间重新编程。
[0100]
一些实施例通过下面的示例来限定:
[0101]
示例1.一种设备,包括:
[0102]
传感器,被配置为输出模拟传感器信号;
[0103]
模数转换器装置,被配置为将模拟传感器信号转换为∑
‑△
调制的、具有n位位宽的第二数字信号;以及
[0104]
脉宽调制器,被配置为基于第二数字信号生成脉宽调制信号。
[0105]
示例2.根据示例1的设备,其中n大于6。
[0106]
示例3.根据示例1或2的设备,
[0107]
其中模数转换器装置包括∑
‑△
模拟转换器和低通滤波器,∑
‑△
模拟转换器用于生成位流,低通滤波器用于基于位流生成第二数字信号,其中n小于基于位流可达到的分辨率。
[0108]
示例4.根据示例1或2的设备,
[0109]
其中模数转换器装置包括模数转换器和数字∑
‑△
调制器,其中模数转换器被配置为将模拟传感器信号转换为具有m位位宽的第一数字信号,数字∑
‑△
调制器被配置为基于第一数字信号生成具有n位位宽的第二数字信号,其中n<m。
[0110]
示例5.根据示例4的设备,其中m大于或等于10。
[0111]
示例6.根据示例4或5的设备,其中m
‑
n位于2和12之间。
[0112]
示例7.根据示例4或6中任一项的设备,其中模数转换器在模数转换器的输出端包括低通滤波器,以将第一信号的位宽从先前位宽提高至m。
[0113]
示例8.根据示例4至7中任一项的设备,其中∑
‑△
调制器是n阶调制器,其中n>=1。
[0114]
示例9.根据示例1至8中任一项的设备,其中脉宽调制器包括计数器。
[0115]
示例10.根据示例1至9中任一项的设备,还包括用于输出脉宽调制信号(spwm)的接口。
[0116]
示例11.根据示例10的设备,其中接口包括推挽接口。
[0117]
示例12.根据示例10的设备,其中接口包括开漏接口。
[0118]
示例13.根据示例10的设备,其中接口包括低压差分信号接口。
[0119]
示例14.根据示例10的设备,其中接口包括电流接口。
[0120]
示例15.根据示例10至14中任一项的设备,还包括模拟低通滤波器,其与接口的输出端耦合。
[0121]
示例16.根据示例1至15中任一项的设备,还包括用于输出第三信号的另外的传感器装置,其中脉宽调制器被配置为,基于第三信号来将脉宽调制信号调制为脉冲编码。
[0122]
示例17.根据示例1至16中任一项的设备,其中脉宽调制器被配置为,基于第二数字信号生成具有在第一范围中的脉冲时长的脉宽调制信号,并且基于另外的信息生成具有在第二范围中的脉冲时长的脉宽调制信号,其中第二范围不同于第一范围。
[0123]
示例18.根据示例17的设备,其中另外的信息包括状态信息。
[0124]
示例19.根据示例1至18中任一项的设备,其中模数转换器装置具有斩波器装置,斩波器装置以斩波器频率工作,其中脉宽调制信号的循环包含斩波器频率的整数个周期。
[0125]
示例20.一种控制器,包括:
[0126]
输入端,用于从传感器设备接收脉宽调制信号;以及
[0127]
处理电路,处理电路被配置为,基于在脉宽调制信号的k个循环期间求平均来生成第一数字接收信号,其中k大于或等于2。
[0128]
示例21.根据示例20的控制器,其中处理电路还被配置为,基于脉宽调制信号的每p个循环来生成第二数字接收信号的信号值,其中p小于k。
[0129]
示例22.根据示例21的控制器,其中p等于1。
[0130]
示例23.根据示例20至22中任一项的控制器,其中k大于或等于4。
[0131]
示例24.根据示例20至23中任一项的控制器,其中求平均包括滑动求平均。
[0132]
示例25.根据示例20至24中任一项的控制器,其中用于求平均的处理电路包括有限脉冲响应滤波器、无线脉冲响应滤波器、级联积分梳状滤波器或数字低通滤波器。
[0133]
示例26.根据示例20至25中任一项的控制器,其中处理电路被配置为,从脉宽调制信号的调制的脉冲时长中获得脉冲编码调制信息。
[0134]
示例27.一种系统,包括:
[0135]
根据示例1至19中任一项的设备,以及与该设备耦合的根据示例20至26中任一项的控制器。
[0136]
示例28.一种方法,包括:
[0137]
基于模拟传感器信号生成具有n位位宽的、∑
‑△
调制的第二数字信号,以及
[0138]
基于第二数字信号生成脉宽调制信号。
[0139]
示例29.根据示例28的方法,其中n大于6。
[0140]
示例30.根据示例28或29的方法,
[0141]
其中生成第二数字信号包括:对模拟传感器信号进行∑
‑△
转换以便生成位流,以及
[0142]
对位流进行低通滤波以便生成具有n位位宽的第二数字信号,其中n小于基于位流可达到的分辨率。
[0143]
示例31.根据示例28或29的方法,
[0144]
其中生成第二数字信号包括:将模拟传感器信号转换为具有m位位宽的第一数字信号,以及
[0145]
对第一数字信号进行数字∑
‑△
调制,以便生成具有n位位宽的第二数字信号,其中n<m。
[0146]
示例32.根据示例31的方法,其中m大于或等于10。
[0147]
示例33.根据示例31或32的方法,其中m
‑
n在2和12之间。
[0148]
示例34.根据示例28至33中任一项的方法,还包括输出脉宽调制信号。
[0149]
示例35.根据示例34的方法,其中输出包括经由推挽接口、开漏接口、或低压差分信号接口的输出。
[0150]
示例36.根据示例34的方法,其中输出包括经由电流接口的输出。
[0151]
示例37.根据示例34至36中任一项的方法,还包括对输出的脉宽调制信号进行模拟低通滤波。
[0152]
示例38.根据示例28至37中任一项的方法,还包括基于另外的传感器信号对脉宽调制信号的脉冲时长进行脉冲编码调制。
[0153]
示例39.根据示例28至37中任一项的方法,其中基于第二数字信号来生成具有在第一范围中的脉冲时长的脉宽调制信号,以及其中基于另外的信息生成具有在第二范围中的脉冲时长的脉宽调制信号,其中第二范围不同于第一范围。
[0154]
示例40.根据示例28至39中任一项的方法,其中生成∑
‑△
调制的第二数字信号包括利用斩波器频率进行斩波,其中脉宽调制信号的循环包含斩波器频率的整数个周期。
[0155]
示例41.一种方法,包括:
[0156]
从传感器设备接收基于∑
‑△
调制信号所生成的脉宽调制信号,以及
[0157]
基于在脉宽调制信号的k个循环期间求平均来生成第一数字接收信号,其中k大于或等于2。
[0158]
示例42.根据示例41的方法,方法还包括:
[0159]
基于脉宽调制信号的每p个循环来生成第二数字信号的信号值,其中p小于k。
[0160]
示例43.根据示例42的方法,其中p等于1。
[0161]
示例44.根据示例41至43中任一项的方法,其中k大于或等于4。
[0162]
示例45.根据示例41至44中任一项的方法,其中求平均包括滑动求平均。
[0163]
示例46.根据示例41至45中任一项的方法,其中还对脉宽调制信号的脉冲时长进行脉冲编码调制,方法还包括对脉宽调制信号进行脉冲编码调制。
[0164]
因此,虽然另外的示例能够具有各种修改和替换形式,但是其一些特定示例在图中示出并且随后进行详细描述。然而,这种详细描述并不将另外的示例限于所描述的特定形式。另外示例可以覆盖落在本公开范围内的所有修改、等价和备选。相似的附图标记在附
图的描述中表示相似或类似的元件,当相互比较时可以以相同的或以修改的形式实施,同时提供相同或类似的功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。