1.本发明涉及贴装设备技术领域,特别涉及一种具有防偏移功能的高精准贴装设备。
背景技术:
2.贴装机主要应用于电子行业的fpc及pcb行业软硬板,手机等3c行业的屏幕及五金、塑胶外壳上的辅料贴装。
3.目前贴附设备有两个方面的发展:(1).单纯的高速和高精度贴装:主要应用行业是手机、平板、笔记本等3c产品pcb硬板、fpc软板上、手机或平板中框外壳、屏幕等贴装各种规格的辅料;(2).辅料的种类有:防水软垫、导电泡棉、导热硅胶、铜箔片、带胶导电布、高温胶纸、双面胶、pet、钢片、fr
‑
4等辅料;贴装设备在产品加工中起到的作用越来越大,应用范围也越来越广泛;然而,现有的贴装设备在使用的过程中还存在一些问题:贴装设备使用的过程中,工作人员将产品放置在传送带上,经过贴装设备加工,将辅料贴装在产品上,然而,工作人员将产品放置在传送带上传输的过程中,产品的位置不能始终处于同一水平线,传输到达的位置也各不相同,偏移现象严重,后续机械臂的夹取工作效率低下,影响贴装效果;其次,贴装设备在吸附辅料时,经常会出现由于吸盘的吸附力不足,而导致辅料位置发生变化,贴装在产品上时出现偏移现象,贴装效果低;为此,提出一种具有防偏移功能的高精准贴装设备。
技术实现要素:
4.有鉴于此,本发明实施例希望提供一种具有防偏移功能的高精准贴装设备,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
5.本发明实施例的技术方案是这样实现的:一种具有防偏移功能的高精准贴装设备,包括主体组件、驱动机构、扶正机构、吸附组件和限位机构,所述主体组件包括第一支架、贴装机主体、第二支架和传送带;所述驱动机构包括支撑杆、顶板、通槽、第一固定板、第二固定板、电机、丝杆、螺纹滑块、导向孔和导向杆;所述顶板位于第二支架的上方,所述顶板的上表面两侧均匀对称焊接有第一固定板和第二固定板,所述第一固定板和第二固定板相邻的一侧通过轴承转动连接有丝杆,所述丝杆的外侧螺纹连接有螺纹滑块;所述扶正机构包括摄像头、连接杆、凸起部和控制器;所述摄像头安装于螺纹滑块的下表面一侧,所述连接杆焊接于螺纹滑块的下表面中部,所述凸起部一体成型于连接杆的底部两侧,所述控制器安装于第一支架的一侧,所述
控制器的信号输入端与摄像头的信号输出端信号连接,所述控制器的电性输出端与电机的电性输入端电性连接;所述吸附组件安装于第一支架的上表面;所述限位机构安装于吸附组件上。
6.在一些实施例中,所述第一支架的一侧安装有贴装机主体,所述第一支架的另一侧固定连接有第二支架,所述第二支架的上表面安装有传送带,产品放置在传送带上进行传输,通过贴装机主体完成贴装工作。
7.在一些实施例中,所述支撑杆的数量为三个,三个所述支撑杆呈三角形排列固定连接于第二支架的上表面,所述顶板的下表面焊接于三个支撑杆的顶部,三个支撑杆形成三角支撑机构,稳定性高。
8.在一些实施例中,所述第二固定板的一侧安装有电机,所述电机的输出轴与丝杆的一端焊接,带动丝杆转动。
9.在一些实施例中,所述螺纹滑块的一侧贯通有两个导向孔,所述导向孔的内侧滑动连接有导向杆,所述导向杆的两端分别焊接于第一固定板和第二固定板相邻的一侧,限制螺纹滑块的运动方向。
10.在一些实施例中,所述吸附组件包括机械臂、气泵、吸盘和支撑板;所述支撑板焊接于第一支架的上表面,所述支撑板的上表面对称安装有两个机械臂,带动气泵运动。
11.在一些实施例中,所述机械臂上安装有气泵,所述气泵的进气口连通有吸盘,吸附辅料。
12.在一些实施例中,所述限位机构包括环形板、第一板体、气缸和第二板体;所述环形板固定连接于气泵外侧,所述环形板的内侧包覆吸盘。
13.在一些实施例中,所述环形板的一侧对称焊接有四个第一板体,所述第一板体的一侧安装有气缸。
14.在一些实施例中,所述气缸的活塞杆贯穿第一板体,所述气缸的活塞杆固定连接有第二板体,防止辅料位置出现偏移,精准性高。
15.本发明实施例由于采用以上技术方案,其具有以下优点:一、本发明通过摄像头采集产品的位置信息,电机的输出轴转动,带动丝杆转动,传动螺纹滑块在丝杆的外侧滑动,带动连接杆运动,通过凸起部扩大接触面积,推动产品运动,驱动机构和扶正机构的数量为多个,且相互配合,达到使产品按照指定轨迹运动的效果,确保产品的位置能够始终处于同一水平线,避免发生偏移现象,不影响后续贴装效果,工作效率高。
16.二、本发明通过启动气泵,通过吸盘吸附辅料,与此同时,气缸的活塞杆伸出,推动第二板体,限位辅料位置,防止辅料位置出现偏移,精准性高,最后通过贴装机主体完成贴附工作。
17.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
附图说明
18.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
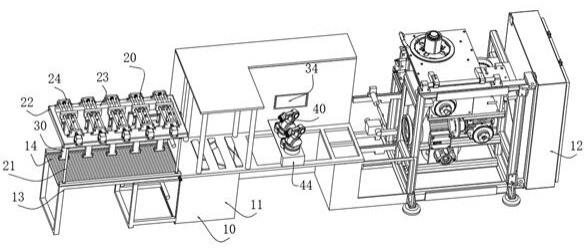
19.图1为本发明的立体结构图;图2为本发明中顶板的俯视结构图;图3为本发明中吸附组件与限位机构连接的结构图;图4为本发明中顶板的仰视结构图。
20.附图标记:10、主体组件;11、第一支架;12、贴装机主体;13、第二支架;14、传送带;20、驱动机构;21、支撑杆;22、顶板;23、通槽;24、第一固定板;25、第二固定板;26、电机;27、丝杆;28、螺纹滑块;29、导向孔;210、导向杆;30、扶正机构;31、摄像头;32、连接杆;33、凸起部;34、控制器;40、吸附组件;41、机械臂;42、气泵;43、吸盘;44、支撑板;50、限位机构;51、环形板;52、第一板体;53、气缸;54、第二板体。
具体实施方式
21.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
22.下面结合附图对本发明的实施例进行详细说明。
23.如图1
‑
4所示,本发明实施例提供了一种具有防偏移功能的高精准贴装设备,包括主体组件10、驱动机构20、扶正机构30、吸附组件40和限位机构50,主体组件10包括第一支架11、贴装机主体12、第二支架13和传送带14;驱动机构20包括支撑杆21、顶板22、通槽23、第一固定板24、第二固定板25、电机26、丝杆27、螺纹滑块28、导向孔29和导向杆210;顶板22位于第二支架13的上方,顶板22的上表面两侧均匀对称焊接有第一固定板24和第二固定板25,第一固定板24和第二固定板25相邻的一侧通过轴承转动连接有丝杆27,丝杆27的外侧螺纹连接有螺纹滑块28;扶正机构30包括摄像头31、连接杆32、凸起部33和控制器34;摄像头31安装于螺纹滑块28的下表面一侧,连接杆32焊接于螺纹滑块28的下表面中部,凸起部33一体成型于连接杆32的底部两侧,控制器34安装于第一支架11的一侧,控制器34的信号输入端与摄像头31的信号输出端信号连接,控制器34的电性输出端与电机26的电性输入端电性连接;吸附组件40安装于第一支架11的上表面;限位机构50安装于吸附组件40上。
24.在一个实施例中,第一支架11的一侧安装有贴装机主体12,第一支架11的另一侧固定连接有第二支架13,第二支架13的上表面安装有传送带14;产品放置在传送带14上进行传输,通过贴装机主体12完成贴装工作。
25.在一个实施例中,支撑杆21的数量为三个,三个支撑杆21呈三角形排列固定连接
于第二支架13的上表面,顶板22的下表面焊接于三个支撑杆21的顶部;通过以上设置,三个支撑杆21形成三角支撑机构,稳定性高。
26.在一个实施例中,第二固定板25的一侧安装有电机26,电机26的输出轴与丝杆27的一端焊接;电机26的输出轴可以带动丝杆27转动。
27.在一个实施例中,螺纹滑块28的一侧贯通有两个导向孔29,导向孔29的内侧滑动连接有导向杆210,导向杆210的两端分别焊接于第一固定板24和第二固定板25相邻的一侧;通过以上设置,在丝杆27转动时,螺纹滑块28会由于导向杆210和导向孔29的限制,不会跟随丝杆27一同转动,而是在丝杆27的外侧滑动。
28.在一个实施例中,吸附组件40包括机械臂41、气泵42、吸盘43和支撑板44;支撑板44焊接于第一支架11的上表面,支撑板44的上表面对称安装有两个机械臂41;机械臂41带动气泵42运动。
29.在一个实施例中,机械臂41上安装有气泵42,气泵42的进气口连通有吸盘43;气泵42启动,通过吸盘43吸附辅料。
30.在一个实施例中,限位机构50包括环形板51、第一板体52、气缸53和第二板体54;环形板51固定连接于气泵42外侧,环形板51的内侧包覆吸盘43;通过以上设置,环形板51不会影响吸盘43的工作。
31.在一个实施例中,环形板51的一侧对称焊接有四个第一板体52,第一板体52的一侧安装有气缸53;在吸盘43吸取辅料后,气缸53的活塞杆伸出,推动第二板体54,限位辅料位置,防止辅料位置出现偏移,精准性高。
32.在一个实施例中,气缸53的活塞杆贯穿第一板体52,气缸53的活塞杆固定连接有第二板体54。
33.本实施例中:电机26的型号为ye2
‑
50,气缸53的型号为scj32
‑
5,控制器34采用型号为zg043的plc板制成的控制器结构。
34.本发明在工作时:产品放置在传送带14上,通过摄像头31采集产品的位置信息,根据预设产品移动轨道信息,控制器34控制电机26启动,电机26的输出轴转动,带动丝杆27转动,传动螺纹滑块28在丝杆27的外侧滑动,带动连接杆32运动,通过凸起部33扩大接触面积,推动产品运动,驱动机构20和扶正机构30的数量为多个,且相互配合,达到使产品按照指定轨迹运动的效果,确保产品的位置能够始终处于同一水平线,避免发生偏移现象,不影响后续贴装效果,工作效率高,接着机械臂41工作,气泵42启动,通过吸盘43吸附辅料,与此同时,气缸53的活塞杆伸出,推动第二板体54,限位辅料位置,防止辅料位置出现偏移,精准性高,最后通过贴装机主体12完成贴附工作。
35.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。