1.本实用新型属于矿山机械领域,尤其涉及铲运机的液压系统。
背景技术:
2.矿山机械行业中,因矿下巷道的狭窄,铲运机整机高度受到巷道的限制,不能做到很大,同时由于矿下进行爆破后,需要尽快将物料搬运出去,因此需要铲运机的效率较高。而对铲运机,实现复合动作可以较好的提高铲运机的工作效率,所谓复合动作是指铲运机举升油缸和翻斗油缸同时做动作。
3.现有技术中,物料搬运机械如铲运机、装载机等工程机械车辆大多数为开中心式定量液压系统,在实现动臂油缸和举升油缸复合动作的工况中有较大的局限性,后来开发出来的负载敏感系统使用变量泵及闭中心式多路阀,大大提高了液压系统的成本及复杂程度,但在实际推广应用中有较大的局限性。另外在铲运机的空间布局狭小,先导式控制及外接电磁阀控制有较大的空间限制。
技术实现要素:
4.本实用新型提供一种铲运机闭中心式定量液压系统,能够实现翻斗油缸和举升油缸的复合动作,满足具有复合工况下的铲运机使用,提高了铲运机的工作效率。
5.本实用新型的铲运机闭中心式定量液压系统,包括液压油箱、定量液压泵、多路阀、翻斗油缸、举升油缸和举升油缸,所述多路阀与所述翻斗油缸、举升油缸、举升油缸、进油流路以及回油流路相连接,所述多路阀内设置有减压阀、换向阀、换向阀、电磁阀、电磁阀、压力补偿器、压力补偿器、梭阀和梭阀;所述电磁阀得电,液压油经减压阀和电磁阀后推动换向阀换向,液压油经过压力补偿器和换向阀流入翻斗油缸;所述电磁阀得电,液压油经减压阀和电磁阀后推动换向阀换向,液压油经过压力补偿器和换向阀流入举升油缸和举升油缸;
6.所述电磁阀和电磁阀同时得电,压力补偿器和压力补偿器分别通过梭阀、梭阀监测翻斗油缸和举升油缸内的压力,并通过压力补偿器补偿翻斗油缸和举升油缸之间的压力差,从而实现复合动作。
7.优选的,所述多路阀内设置有流量控制阀,液压油缸不动作时,流量控制阀处于上位将液压油溢流回到液压油箱;液压油缸动作时,引入负载端的压力作用于流量控制阀的下端并与弹簧力共同使流量控制阀始终处于停止位,使液压油能作用于液压油缸,且通过梭阀和梭阀来监测最大负载压力,使得流量控制阀不会发生溢流。
8.优选的,所述多路阀内设置有先导油过滤器,先导油过滤器用于过滤流入所述电磁阀和电磁阀的液压油。
9.优选的,所述多路阀内还设置有电磁阀和电磁阀,电磁阀与所述电磁阀并联,电磁阀与所述电磁阀并联。
10.优选的,所述回油流路上设置有回油过滤器。
11.优选的,所述流量控制阀为三通流量控制阀,所述减压阀为二位三通减压阀。
12.优选的,还包括转向阀,所述定量液压泵为串联的工作泵和转向泵,液压油经过定量液压泵流入所述多路阀或转向阀,流经转向阀的液压油进入转向系统。
13.本实用新型还提供一种铲运机,包括所述的铲运机闭中心式定量液压系统。
14.与现有技术相比,本实用新型采用集成式电液比例控制,可以实现铲运机举升油缸和翻斗油缸的复合动作,满足具有复合工况下的铲运机使用,提高了铲运机的工作效率;此外,本实用新型在实现复合动作的前提下减少了铲运机空间内部的管路布局,易于维护保养,降低了铲运机的整机成本。
附图说明
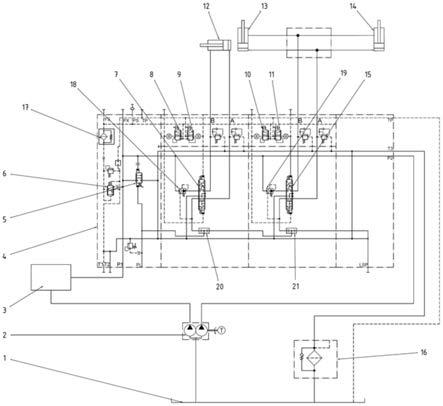
15.图1为本实用新型的液压系统原理图。
16.附图标记:1、液压油箱;2、定量液压泵;3、转向阀;4、多路阀;5、流量控制阀;6、减压阀;7、第一换向阀;8、第一电磁阀;9、第二电磁阀;10、第三电磁阀; 11、第四电磁阀;12、翻斗油缸;13、第一举升油缸;14、第二举升油缸;15、第二换向阀;16、回油过滤器;17、先导油过滤器;18、第一压力补偿器;19、第二压力补偿器;20、第一梭阀;21、第二梭阀。
具体实施方式
17.下面结合实施例和说明书附图对本实用新型作进一步的说明。
18.如图1所示,本实用新型的液压系统包括液压油箱1、定量液压泵2、转向阀3、多路阀4、翻斗油缸12、第一举升油缸13、第二举升油缸14和回油过滤器16,多路阀4 内集成有流量控制阀5、减压阀6、第一换向阀7、第二换向阀15、第一电磁阀8、第二电磁阀9、第三电磁阀10、第四电磁阀11、先导油过滤器17、第一压力补偿器18、第二压力补偿器19、第一梭阀20和第二梭阀21,其中,流量控制阀5为三通流量控制阀,减压阀6为二位三通减压阀。本实用新型在多路阀4内集成四个电磁阀、流量控制阀5 和减压阀6等,减少了管路占用铲运机内的空间。
19.液压油箱1为储存液压系统工作所需油液的容器。定量液压泵2是工作泵和转向泵串联的,由变速箱驱动为定量液压系统提供液压能;由定量液压泵2提供的液压油流经多路阀4,由多路阀4控制液压油的流向,让液压油流向液压油缸做动作或流回到液压油箱1。通过控制减压阀6从多路阀4的进油口为电磁阀提供液压油源,然后由液压油推动换向阀的阀芯动作,使液压油经过换向阀流入液压油缸,实现液压油缸的动作。
20.在控制液压油缸不动作时,流量控制阀5处于上位将液压油溢流回到液压油箱1,在控制液压油缸有动作时,引入负载端的压力作用于流量控制阀5的下端并与弹簧力共同使流量控制阀5始终处于停止位,使液压油能作用于液压油缸。通过第一梭阀20和第二梭阀21来监测最大负载压力,保证流量控制阀5在液压油缸动作时不会发生溢流。
21.通过集成于多路阀4内的第一电磁阀8、第二电磁阀9、第三电磁阀10和第四电磁阀11控制液压油缸的举升下降,翻斗收斗动作,且因四个电磁阀控制两个换向阀的进油属于并联方式,可通过控制四个电磁阀的得电来实现举升油缸和翻斗油缸的复合动作。最后由回油过滤器16将从多路阀4流出的液压油过滤然后回到液压油箱1,液压油可以得到循环利用。
22.本实用新型的液压系统工作时,液压油由定量液压泵2从液压油箱1中吸出,流入转向阀3和多路阀4,流入转向阀3的液压油在没有转向动作时,直接流入到多路阀4,实现双泵合流。
23.当操作人员操作手柄想实现翻斗油缸12收斗和翻斗动作时,第一电磁阀8或第二电磁阀9得电,液压油经减压阀6和先导油过滤器17,再通过得电的第一电磁阀8或9,从而推动第一换向阀7换向,液压油经过第一压力补偿器18和第一换向阀7流入翻斗油缸12,实现翻斗油缸12的收斗和翻斗动作。
24.当操作人员操作手柄想实现第一举升油缸13和第二举升油缸14上升和下降动作时,第三电磁阀10或第四电磁阀11得电,液压油经减压阀6和先导油过滤器17,再通过得电的第三电磁阀10或第四电磁阀11,从而推动第二换向阀15换向,液压油经过第二压力补偿器19和第二换向阀15流入第一举升油缸13和第二举升油缸14,实现举升油缸的上升和下降动作。
25.第一换向阀7和第二换向阀15还分别配备了第一压力补偿器18和第二压力补偿器 19,当同时操作手柄使第一电磁阀8(或第二电磁阀9)和第三电磁阀10(或第四电磁阀11)得电时,复合动作(例如上升时收斗和翻斗操作,下降时收斗和翻斗操作)出现,此时因为两个执行器(翻斗油缸12、第一举升油缸13和第二举升油缸14)内的压力不同,会造成液压油优先流向压力低的执行器,使得复合动作不能实现,此时配置的第一压力补偿器18和第二压力补偿器19分别通过第一梭阀20和第二梭阀21监测两个执行器的最大压力,然后在低压力的换向阀内使压力补偿器补偿两个执行器之间的压力差,此时在做复合动作时,动作完全取决于第一换向阀7和第二换向阀15的开度,从而实现复合动作。
26.上述实施例仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和等同替换,这些对本实用新型权利要求进行改进和等同替换后的技术方案,均落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。