1.本发明涉及一种真空泵,特别地,涉及是一种涡轮分子真空泵。本发明还涉及一种具有至少一个真空泵,特别地,具有涡轮分子真空泵的真空系统。本发明还涉及一种用于监控真空泵或包括至少一个真空泵的真空系统的方法。
背景技术:
2.在本公开的范围中,真空系统理解为例如由一个或多个真空泵和一个或多个待抽真空的真空室或真空腔构成的装置。这种装置有时也被称为泵站。
3.在许多技术领域中,并且也在真空技术的领域中,状态监控,即关于真空系统或各个真空泵的各个部件的状态信息的获取和评估,在实践中变得越来越重要。与状态监控相关的目标极为多样化,并且涵盖例如从提高真空泵用寿命,到简化和改善真空泵和真空系统的维护和维修,直至改进操作者的使用可能性以及通过提供涉及真空泵和真空系统的信息提高客户友好度。在本文中通常将真空泵或包括真空泵的真空系统的操作者理解为客户,该客户从泵制造商购得真空泵。在这种背景下,状态监控在例如由于保修索赔和投诉中引起的泵制造商和操作者之间的可能纠纷方面会是重要的。
技术实现要素:
4.因此,本发明的目的是创建一种用于对真空泵或包括至少一个真空泵的真空系统进行状态监控的尽可能简单、可靠和成本合适的设备。
5.该目的的方案分别通过独立权利要求的特征实现。
6.在根据本发明的真空泵中,以及在根据本发明的包括至少一个真空泵的真空系统中,根据本发明,分别设有分配给真空泵的惯性测量单元,该惯性测量单元包括至少一个惯性传感器,该惯性传感器设计为用于获取真空泵的运动和/或真空泵的取向,并且提供与之相关的测量数据和/或提供通过评估这些测量数据而获得的信息。
7.专业领域中,惯性测量单元也称为imu(imu=inertial measurement unit,惯性测量单元),惯性测量单元为多个惯性传感器的空间布置。惯性传感器可以是例如加速度传感器或转速传感器。转速传感器也称为回转仪传感器或陀螺仪传感器。如今,这种惯性传感器被大量使用,并且在市场上可以以各种不同的设计和质量来获得。
8.加速度传感器通常提供相对于平移轴线的平移运动的线性加速度值。转速传感器通常提供相对于旋转轴线的角速度。通过对加速度传感器的加速度值进行两次积分,可以获得路径信息,即关于相对于参考方位或参考位置的所经过的路径的信息。通过对转速传感器的角速度进行一次积分,可以获得转动角信息,即关于相对于参考方位或参考取向的所分别经过的转动角的信息。出于该原因,惯性传感器通常用于导航任务,例如用于无人机。但是惯性传感器也广泛用于其他应用,例如用作移动电话中的传感器或用于测量建筑物和机器上的震动。
9.在市场上可获得的惯性传感器可以设计为,使得这些传感器直接提供加速度信号
或速度信号(即原始测量值或原始数据),该加速度信号或速度信号因此不需要额外的预处理或处理,以便直接从惯性传感器本身获得涉及相应的加速度或速度的信息。因此,根据本发明所使用的、可以包括一个或多个惯性传感器的惯性测量单元可以直接提供一个或多个加速度或速度信号。但是,可选地,惯性测量单元也可以设计为并且为此特别地配备有适当的电子部件,使得可以对“原始数据”或从其中获得的信息进行原则上任意的信号预处理和处理以及存储。
10.在本公开的范围中,物体的“方位”,特别是真空泵的“方位”应理解为在相应坐标系中的它的位置和取向。物体的平移改变物体的位置,并且物体的旋转改变物体的取向。物体的运动可以仅包括相对于一个、两个或三个平移轴线的平移,或者仅包括相对于一个、两个或三个旋转轴线的旋转,或者包括尤其相对于所有六个可能的自由度的平移和旋转。
11.此外,在本公开的范围中,物体的“运动”,特别是真空泵的“运动”应理解为真空泵的振动或振荡。
12.物体的运动,特别是真空泵的运动还引起在物体周围的声音发射。振动或振荡通常还导致不期望地发射声级。借助声压传感器或声级频率传感器,尤其是借助麦克风,可以获取物体的产生的声压或声级或声谱。在本公开的范围中,为了简单起见,通用术语“惯性传感器”也同义地适用于声压或声级传感器,即使它们没有作为具体实施例被再次分别提及。
13.根据本发明,测量数据由分配给真空泵的,特别是集成到真空泵中的惯性测量单元的至少一个惯性传感器提供,该测量数据可以是原始测量数据,特别是由惯性传感器直接产生的加速度或速度信号。该原始测量数据可以例如存储在真空泵中,并且因此例如可供后续评估。因此,在此无需立即进行信号处理,尤其是无需进行实时信号处理。可选地或附加地,所提供的测量数据也可以是经预处理的测量数据,该测量数据例如借助于属于惯性测量单元的电子部件通过预处理或处理从惯性传感器直接提供的信号中获得。
14.在本发明的一个优选的实施例中,分配给真空泵的,优选地集成在真空泵中的惯性测量单元因此包括一个或多个惯性传感器,一个或多个惯性传感器分别直接提供加速度信号或速度信号。
15.在根据本发明的监控方法中,在真空泵或真空系统运行之前、期间和/或之后,真空泵的运动和/或真空泵的取向和/或真空系统的运动借助于真空泵的惯性测量单元来检测,并且提供与它们相关的测量数据和/或提供通过评估这些测量数据而获得的信息。如已经在上下文中基于根据本发明的真空泵和根据本发明的真空系统所提及的那样,这些测量数据可以是惯性传感器的原始测量数据和/或经预处理的测量数据。
16.根据本发明的监控特别包括对真空泵和/或真空系统的状态或状态变化的获取或检测或识别,以及与它们相关的状态信息的提供和/或存储。
17.根据本发明可行但非强制性的是:在运行期间评估测量数据,并且作为对该评估的反应,对真空泵和/或真空系统的当前运行的进行干预。因此,根据本发明例如可行的是:在真空泵运行期间仅存储测量数据或通过测量数据的评估获得的信息,并且在后续的时间点进行评估,例如在维修情况下或在定期维护中。
18.根据本发明,惯性测量单元可以集成到真空泵中。可选地,惯性测量单元可以集成到外部附件中,该外部附件可以可拆卸地安装在泵上。例如,惯性测量单元可以集成到真空
泵的电子部件壳体中,该电子部件壳体设置在真空泵的实际的泵壳体之外,并且特别的,与真空泵可拆卸地连接。测量数据的预处理或评估可以在所提及的附件中,在电子部件壳体中或在真空泵的驱动电子部件中进行。驱动电子部件可以位于所提及的电子部件壳体中。即作为附件也作为集成方案,具有插接连接器的惯性测量单元可以有线地或通过无线电连接与显示、输出、评估、数据转发或其他数据处理单元连接。
19.下面说明本发明的其他可行的实施例,即根据本发明的真空泵和根据本发明的真空系统以及根据本发明的监控方法。
20.根据本发明的一个实施例,与惯性测量单元连接的控制装置分配至真空泵,该控制装置设计为用于评估惯性测量单元的测量数据。
21.根据本发明的另一实施例,输出装置分配至真空泵,经由该输出装置可以输出或调用惯性测量单元的测量数据和/或通过评估这写测量数据而获得的信息。个输出装置可以是例如真空泵的数据接口或称作为附件端口的真空泵的附件接头。可选地或附加地,输出也可以无线得进行。
22.此外,根据本发明的一个实施例可以提供的是:存储装置分配至真空泵,该存储装置设计为用于存储惯性测量单元的测量数据和/或通过评估这些测量数据而获得的信息。
23.如已经在上下文中基于惯性测量单元所提到的那样,控制装置和/或存储装置可以集成在真空泵中、真空泵的电子部件壳体中、真空泵的附件中或者通过数据转发连接在可能的非本地位置的数据存储和处理装置中。因此,本发明可以利用诸如边缘计算、云计算和/或雾计算的基础设施。
24.控制装置可以集成在惯性测量单元中。可选地,可行的是:惯性测量单元可以形成控制装置的组件。存储装置可以集成在控制装置或惯性测量单元中,或者与它们分开地设置。
25.惯性测量单元和/或控制装置和/或存储装置可以集成到真空泵的驱动电子部件中。
26.优选地,惯性测量单元包括多个惯性传感器的空间布置,其中特别地,惯性测量单元包括:两个或三个加速度传感器,分别将真空泵的三个成对彼此垂直延伸的平移轴线中的一个分配给这些加速度传感器;和/或两个或三个转速传感器,分别将真空泵的三个成对彼此垂直延伸的旋转轴线中的一个分配给这些转速传感器。
27.惯性测量单元可以设计为例如mems(mikro
‑
elektro
‑
mechanisches system,微机电系统),或者是mems的组件,或者设计为为光学系统。
28.如上文已经提及,这种惯性测量单元的结构和工作方式以及惯性测量单元或imu的其他具体的设计方案是本领域技术人员熟知的,因此对此无需更详细深入讨论。
29.根据本发明,惯性测量单元原则上可以被安装在真空泵的任意位置上。根据真空泵的具体的设计方案以及根据相应的应用,真空泵的一个或特定的位置可以被证明为对于设置惯性测量单元是尤其有利的。根据本发明,用于设置惯性测量单元的可能的位置是真空泵的真空套管。这种真空套管原则上是已知的。真空泵的真空套管例如可以由电路板形成。根据本发明,惯性测量单元可以设置在这种形成真空套管的这种电路板上。以此方式,现有的真空泵可以以相对较小的费用并且以相对低的成本加装惯性测量单元。另一个优点在于:对于惯性测量单元的这种设置,真空泵的批量生产仅需要相对较小地改变。
30.但是,完全也可行的是:将惯性测量单元或任何其他传感器(例如温度测量传感器)施加在自身的、固定在泵之内的电路板上。然后,可以将该电路板与另一电路板或真空套管或作为真空套管的电路板连接,更确切地说,例如借助于线缆可拆卸地(例如借助插接连接)、受限可拆卸地(例如借助夹断连接(klemmschneidverbindung))或不可拆卸地(例如焊接)来连接。
31.根据本发明的监控方法的一个实施例提供的是:根据测量数据确定确定真空泵和/或真空系统的一个或多个状态信息。根据本发明,状态信息或每个状态信息可以经由真空泵的输出装置输出和/或存储在真空泵的存储装置中。
32.状态信息例如可以仅是真空泵或真空泵的一个或多个预设的组件的“快照(momentaufnahme)”。可选地,状态信息可以反映真空泵或相应组件的时间表现或时间发展,特别地,分别关于真空泵或相关部件的一个或多个参数或信号。在这种情况下,惯性测量单元以基本上任意的、预设的或可预设的时间分辨率重复地提供测量数据。
33.根据本发明的一个可行的实施例,真空泵在空间中的取向和/或相对于真空系统的一个或多个其他部件的真空泵取向被确定为真空泵和/或真空系统的状态信息。
34.在上下文中,真空泵的控制装置可以设计为:根据所确定的真空泵的取向允许或禁止真空泵的运行开始。因此,真空泵可以自己确定该真空泵是否被取向为不允许运行,并且使得用户不能无意地发动不允许的运行开始。
35.可选地或附加地,在评估真空泵和/或真空系统的振动相关的频谱时,考虑所确定的真空泵取向。在此,可以利用如下事实:真空泵的振动表现与在空间中的泵的取向相关。结果,振动表现可以特定地根据所确定的真空泵的取向来评估和评价。
36.根据本发明的另一实施例,真空泵的取向仅在特殊的、预设的事件中存储。因此,所确定的取向在以下方面不主动地使用:根据所确定的取向主动地干预泵的当前进行的运行,而是单纯存储信息用于被动地利用该信息。就该实施例的意义而言的事件例如可以是真空泵通电、真空泵的运行开始、包括真空泵的真空系统的预设的一个或多个部件(除真空泵本身之外)的运行开始或者真空泵的安装位置的改变。然后,例如在维修或投诉的情况下,所存储的信息可在后续的时间点被考虑用于评估。
37.根据本发明的另一实施例,真空泵包括在运行期间借助于驱动电机处于旋转中的转子,其中转子的不平衡度和/或真空泵和/或真空系统的振动状态被确定为真空泵和/或真空系统的状态信息。
38.优选地,在真空泵运行期间,重复地确定转子不平衡度和/或振动状态。以这种方式,例如,转子不平衡度或振动状态的时间表现,特别是真空泵的振动表现的时间发展,可以被监控和记录,即被保存以用于后续的评估。
39.在此,例如,可以确定转子不平衡度和/或振动状态的时间变化的至少一个量度,特别的是变化速率。特别地,这参考与转子不平衡度和/或振动状态的在转子的运行转速恒定的情况下确定的相应的基础状态进行。
40.确定基础状态可以在一个或多个一次性的事件,如真空系统的制造最终测试、初始调试中或者也在真空系统的验收或首次生产开始阶段期间进行,使得该基础状态可以被存储,并且用作在继续运行中发生的状态信息的记录永久参考基础。
41.根据本发明的一个实施例,在超过相对或绝对极限值时触发反应。特别地,输出警
告指示。极限值例如是转子不平衡度和/或振动状态的极限值,或者是转子不平衡度和/或振动状态的时间变化的极限值。例如,可以确定关于时间的振幅,并且从该支撑点中可以以计算的方式推导出补偿曲线,该补偿曲线的局部斜率为振动表现的时间变化的量度,对该补偿曲线可以进行评估或者再次进行时间分析。此外,可以借助统计方法,即例如趋势或分布分析、稳定性或离群值分析详细地评估支撑点。
42.可选地或附加地,根据另一实施例,在接近转子不平衡度和/或振动状态的相对或绝对极限值时,或者在接近转子不平衡度和/或振动状态的时间变化的相对或绝对极限值时,计算真空泵的下次维护日期的估计值,或者调整当前预设的维护间隔。
43.根据本发明的另一实施例,计算真空泵的利用率储备的量度,例如相对于在交付真空泵时所设定的100%的输出值计算,从该100%输出值起在真空泵运行期间向回计数。此外,可选地或附加地,可以计算直到真空泵的下次维护为止的时间的推荐值,并且经由数据接口保持可用,或者经由输出单元直接输出。这尤其在考虑真空泵的至今为止的使用概况的情况下进行,因此对每个单独的真空泵单独的进行。
44.在确定转子不平衡度和/或振动表现时,可以将惯性测量单元的测量数据的评估限于沿径向方向(相对转子的转动轴线)的运动。
45.因此,转子不平衡度和/或振动状态的确定是功能强大的诊断工具,借助该诊断工具,为真空泵的操作者和制造商给出用于检查和监控真空泵的功能性和运行安全性的多种可行性。
46.根据本发明,所确定的转子不平衡度和/或所确定的振动表现的评估可以在以下意义上进行,真空泵的参数被评估为变化指标。在上下文中,该参数,即例如转子不平衡度,可以形成优选的多个预先限定的kpi(kpi=关键性能指标)中的一个。特别地,该参数可以形成所谓的健康kpi,该健康kpi允许评估真空泵的当前的功能状态。
47.根据本发明,可以通过与转子的运行转速的频率相对应的一次谐波(1.harmonische)来评价转子不平衡度。更高次谐波也可用于转子不平衡度的评价。但是,这不是绝对必要的。
48.在评估测量数据时,根据本发明,可以使用傅里叶分析领域中的方法,例如fft(fft=快速傅里叶变换)。例如,这种fft可以基于数字时间信号来创建。此外,根据本发明,可以在测量数据的评估中使用数字信号处理的特殊方法,例如戈尔策尔算法(
‑
algorithmus)或另一种类型的离散傅里叶变换。戈尔策算法允许计算频谱的各个离散频谱份额。以该方式,在评估测量数据时例如可以考虑所谓的运行峰值。
49.就评估测量数据时的信号处理而言,本发明实现一种相对简单的处理方式,特别地,该处理方式无需连续调谐频率,并且无需使用所谓的频率滤波器电路。
50.在评估测量数据时的上述可能性可以彼此组合,并且不限于真空泵的振动的特定原因。真空泵的振动例如可以由转子不平衡度引起,但是也可以由外部来源引起,例如由相应的真空系统的其他泵或具有可移动零件的部件引起,设置有惯性测量单元的真空泵属于该真空系统。
51.根据本发明的另一实施例,可以确定真空泵和/或真空系统的振动状态作为真空泵和/或真空系统的状态信息。特别地,在此,确定涉及真空泵和/或真空系统的振动的频谱。
52.特别地,在真空泵包括在运行期间借助于驱动电机处于旋转中的转子时,在运行期间形成真空泵的振动。但是,如已经提到的那样,真空泵的振动还可以具有其他的,例如外部的,但是还有其他内部的原因。因此,本发明不限于包括在运行期间借助于驱动电机处于旋转中的转子的这种真空泵。例如,所谓的螺旋式真空泵不具有在运行期间转动的转子,而是具有一个或多个其他可动的部件,该一个或多个其他可动的部件实施所谓的轨道运动。本发明也可以与这种真空泵结合使用。
53.如已经提到的那样,根据本发明,真空泵的频谱的确定可以包括来自傅立叶分析领域中的方法,例如所谓的fft(fft=快速傅立叶变换)。频谱的检测可以限于单独的频率或多个频带。所确定的频谱的存储可以限于存储频谱的特定点、区域或部段,例如这样:仅存储特定数量的相对最高的峰值。
54.如果真空泵和/或真空系统的振动状态被确定作为状态信息,特别地,可以提供的是:振动状态在真空泵加速期间被确定,特别地,被存储。因此,振动状态在真空泵的初始的运行阶段期间被确定,在该初始的运行阶段期间转子的转速上升。特别地,附加地,在转子以运行转速运转的情况下,在加速之后可以确定振动状态。
55.优选地,在此,即在真空泵加速期间确定真空泵和/或真空系统的共振状态。泵在此充当激励器。泵和系统如何对激励做出响应,存在关于宽的频谱(尤其是0hz直至运行转数)上的当前的共振的说明。例如,提供涉及共振状态的信息以输出给外部装置,例如真空系统的系统控制装置,或者以通过外部装置,特别是真空系统的系统控制装置调用,并且以该方式例如提供给真空系统的操作者。
56.用于确定共振状态的上述处理方式不仅可以在真空泵加速时使用,而且也可以相反地在真空系统的循环或处理结束时使用,进而在真空泵减速或惯性运行时使用。该方法可能需要附加的运行时间,例如在预设的处理结束之后,或在预设的处理结束时的附加的测量时间,以确定在转子仍以运行转速运转时的振动状态,可能其中过程气体流至少部分还是活跃的。此外,可能延迟真空系统的通风,特别是以主动调节的方式执行,以便真空泵可以最佳地减速,以实现尽可能最佳的共振测量。
57.在惯性运行中进行测量相对于在真空泵加速期间进行确定的潜在优点在于,例如,驱动电机完全不运行或者仅以较小的制动功率运行,而不是以最大功率运行,这导致大都根据情况而在空间上紧密布置的惯性测量单元及它的信号线的潜在电磁和机械干扰频谱较低。
58.另一优点在于,在循环或过程结束时,在真空泵和真空系统的稳定的、热稳态的状态期间确定状态信息。通常地,先前的操作流程规则地、以相同的方式发生,由此产生了所获取的运行状态的长期稳定的比较基础。可以显著地减小非特定的、极少出现的状态的不期望的影响或不定性和它们对状态信息的作用。例如,在此列举系统的“冷启动”、即真空泵和真空系统在运行阶段开始时的第一加速或者在较长的过程暂停之后的第一运行周期。
59.最后,应该提到组织上的优点,即获得在可能较长的运行流程或批次结束的可能当前的状态信息,该状态信息尽可能最佳地告知用户/操作者在其他可能较长的运行流程或批次的可能随后规划的、潜在的开始之前还剩余的使用预留量。
60.可选地或附加地,根据本发明,可以通过如下方式借助于所确定的共振状态提高真空泵和/或真空系统的运行安全性和/或使用寿命:即在预设的时间点、特别当其转子转
速接近共振状态时由真空泵和/或真空系统输出警告或自动执行转子转速的调节。由此可以避免真空泵在共振状态运行。
61.根据本发明,可选地或附加地,真空泵和/或真空系统的振动状态的确定也可以用于如果根据所确定的振动状态由真空泵的控制装置或由真空系统的系统控制装置识别到一个或多个其他的、以与真空泵大致相同的运行转速运行的、处于真空系统之内的真空泵,则自动地改变真空泵的转子的转速。以该方式,可以防止不期望的颤振状态。
62.此外,根据本发明的另一实施例,真空泵和/或真空系统的振动状态的确定可以用于:根据所确定的振动状态,监控真空泵的一个或多个预设的参数和/或真空泵的一个或多个传感器的一个或多个信号。该监控特别在一个或多个参数或一个或多个信号的时间表现方面进行。
63.优选地,关于真空泵和/或真空系统的在学习阶段中确定的目标状态方面进行这种监控,其中在该学习阶段之后,由真空泵的控制装置检查所监控的一个或多个参数和/或所监控的一个或多个信号是否对应于目标状。如果在该检查时识别到与目标状态的偏差(在考虑预设公差的情况下),则对相关的参数或信号的该变化进行评估和/或评价,特别地,在考虑预设的标准的情况下。
64.优选地,用于确定目标状态的上述学习是自动的。
65.根据本发明,例如如上所述,这种学习还可以完全通用地进行,即与振动状态的确定无关和也与基于此的监控无关地进行,以便对于借助惯性测量单元执行的任何测量提供尤其持续的比较基础。
66.根据本发明的另一实施例,确定一个或多个特殊事件作为真空泵和/或真空系统的状态信息。所确定的一个或多个事件,即涉及一个或多个事件的信息或数据,可以经由真空泵的输出装置输出,和/或可以存储在真空泵的存储装置中。
67.可以提供的是,仅当事件实际出现时,才对永久确定的测量数据进行缓冲并随后存储。被评价为“事件”的内容取决于相应的应用,并且可以通过特定标准预设。在此,可以使用预设的极限值,例如用于作为参数测量的振动幅度的极限值,将超过该极限值评价为事件出现。根据本发明,可以将一个或多个极限值分配给任意的参数或信号。
68.本发明的一个实施例包括以下内容,真空泵包括在运行期间借助于驱动电机处于转动中的转子,并且探测转子在第一轴向位置和第二轴向位置之间的轴向位移作为在真空泵的运行期间的特殊事件。例如,第一轴向位置是转子的所谓的预真空位置,并且第二轴向位置是所谓的高真空位置。
69.转子的这种位移也称为跳动,转子的这种位移原则上是本领域技术人员已知的。在实践中观察到的这种现象特别在涡轮分子真空泵的混合支承的转子中出现。在此,混合支承意味着在泵的高真空侧(hv侧)上,在泵的转子和定子之间存在磁性轴承,特别是具有永磁体的无源的、起排斥作用的径向轴承。相反,在预真空侧(vv侧)上,转子借助于滚动轴承,特别是滚珠轴承支承。轴承设计相应地将磁性轴承识别为具有径向的浮动轴承,并且将滚动轴承识别为相对于旋转轴线具有径向和轴向轴承作用的固定轴承。
[0070]“转子跳动”的原因是转子的运行所引起的发热以及沿这转子旋转轴线的由发热引起的转子的轴向的热膨胀,该热膨胀在浮动轴承侧引起转轴和定子之间的磁性轴承的转子侧的磁性轴承组和定子侧的磁性轴承组之间的轴向相对位置的变化。该变化导致在磁性
轴承中的、与系统有关的、不期望出现的磁性轴承的轴向排斥力发生变化,这导致在某个时间点转子在高真空侧方向上发生的突然运动。该运动通过因技术原因而存在的固定轴承侧的轴向背隙而实现和限制。特别地,背隙由滚动轴承间隙,特别是轴承游隙或运行间隙,和其他相邻部件的弹性,特别是隔绝振动的和/或衰减振动的弹性体轴承嵌入,组成。
[0071]
在冷却转子时,回到预真空侧的跳动也是可能的,特别地,该跳动在真空系统停止运转或停止之后的真空泵冷却时进行。根据运行状态而变化的温度以及由此产生的设置在轴承位置之间的定子部件的热膨胀也影响浮动轴承侧的磁性轴承部件的轴向位移,然而通常由于在运行中温度变化较小,该影响小于转子的影响。通过在运行期间的共同发热,转子和定子部件的部分膨胀量可能会相互补偿,然而这在很大程度上与材料选择(例如相应的膨胀系数),以及可能主要设置在定子上的冷却装置的类型相关。
[0072]
特别地,转子跳动的事件可以描述为固定轴承中承受的轴向轴承载荷的符号变换。该轴承载荷由转子的重力(该重力根据真空泵的空间取向或安装方向而不同强度地出现)和通过磁性轴承引起的轴向排斥力组成。在极限运行状态,如具有在最大温度下的转子和非常良好冷却的定子的真空泵的运行中,或者在作为另一极限的最小温度下的真空泵的第一“彻底冷”启动中的磁性轴承的最大轴向排斥力,从值上来看通常大于转子的绝对重力。转子跳动相应地独立于在特定运行阶段期间泵的空间取向出现,尤其在真空泵的短暂的预运行阶段之后或在停机之后通常每个相位出现一次。
[0073]
在真空泵的制造或维护期间,可以进行混合支承的所谓的“设定”,使得在正常温度下借助于机械的控制和设定机构或设备将轴向排斥力的作用方向和值改变至对于随后的真空泵运行来说是最佳选择的值。特别地,这通过由辅助装置,如增加垫圈或调节预紧的、自锁的螺纹调节元件对定子侧上的浮动轴承和固定轴承的轴向间距进行机械变化而发生。
[0074]
可以使用设定来确保不同的目的,特别地,应当在所有可能的运行状态中将最大轴向支承力保持得教低,以提高滚动轴承使用寿命,此外也可以是如下目的,在特定的运行时间点,例如在热运行期间可靠地执行所需的转子跳动。
[0075]
因此,在上下文中,提及之前“预真空侧运行的”转子的“跳动”,该转子随后“高真侧地运行”,或者相应地反之亦然。
[0076]
因为这种转子跳动分别引起真空泵的(短暂的)运动,所以可以借助于根据本发明的惯性测量单元来探测这种事件。例如,在随后的评估中,例如可以检查:转子在预真空侧占泵总运行时间的多少份额以及转子在高真空位置中占多少份额。转子温度和单个或多个泵体温度的比较可用于确定在相应状态下占主导的、通过磁性轴承的轴向排斥力所引起的轴承载荷,该轴承载荷作为附加部件添加至滚动轴承的通常静态和动态的轴承载荷。转子跳动的点也可以被评价,特别地,如果需要用于重新设定的维护或轴承设定的修改,则可以生成通知。
[0077]
可选地或附加地,根据本发明,可以探测真空泵整体的运动作为特殊事件。对该运动例如可以在真空泵的平移和/或旋转的方向和值方面进行分析。真空泵的运动的分析例如可以在真空泵运行期间在移动式或所谓的半移动式的真空系统中进行。
[0078]
由于陀螺力,相对于真空泵的转子的转动轴线不同轴地发生的转速变化的速度在转动系统(如真空泵)的径向轴承载荷中起决定性的作用。因此,转速的分析可以用于提供
关于在真空泵运行中转速变化的允许速度的信息和/或警告。在此,可以根据转动方向不同级别地限定允许的负载以及因此的变化速度。可以对每个空间轴线输出信息或者也作为计算的得出的比较值输出。
[0079]
在具有非接触式磁体支承装置的真空泵中,径向的和可能也存在的轴向的轴承间隙的消耗通常是用于限定允许的转速变化和平移速度变化的限制变量。主要是在具有混合支承装置的真空泵中,在运行期间直接测量安全轴承间隙几乎是不可能的。运动变化的方向相关的监控,无论是旋转的还是平移的,都可以提供如下的状态信息,磁体支承装置处于哪个负载区域中,以及是否具有足够的安全余量来存储警告或错误阈值。。
[0080]
根据本发明可以确定的其他可能的特殊事件是真空泵的安装位置的变化,即所谓的“冲击”,其为分别引起短暂超过预设的加速度极限值的事件。例如,这种冲击可以通过撞击真空泵,或者通过对真空系统或真空泵的其他机械作用,例如通过真空泵或真空系统的翻倒,来进行。
[0081]
根据本发明,可以以多种方式和方法使用测量数据和/或从该测量数据中获得的信息。例如,数据/信息可以仅存储在真空泵中,更确切地说,使得仅真空泵的制造商可以访问该数据/信息。
[0082]
可选地,数据/信息可以提供给真空泵或包括真空泵的真空系统的操作者。如在其他地方已经提到的那样,在实践中,该操作者通常是真空泵制造商的客户。
[0083]
通常,根据本发明可以提供的是,只有在存在授权的情况下,才可以输出或调用测量数据和/或通过评估这些测量数据而获得的信息。特别地,这可以经由真空泵的接口或真空泵的附件接头来进行。所需的授权例如可以通过真空泵的制造商进行。因此,可以允许真空泵的某些操作者访问数据/信息,而其他操作者可以被拒绝。
[0084]
可选地或附加地,可以将数据/信息输出至包括真空泵的真空系统的系统控制装置和/或可以由该系统控制装置来调用。因此在此,不必直接经由真空泵访问数据/信息,而可以经由系统控制装置来进行,真空泵,特别是真空泵的控制装置集成到系统控制装置中。
附图说明
[0085]
下面根据优选的实施例参考附图以示例的方式描述本发明。附图分别示意性地示出:
[0086]
图1示出涡轮分子泵的立体图,
[0087]
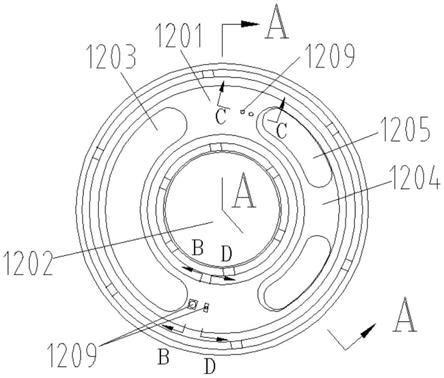
图2示出图1的涡轮分子泵的底侧的视图,
[0088]
图3示出沿着图2所示的剖面线a
‑
a的涡轮分子泵的横截面,
[0089]
图4示出沿着图2所示的剖面线b
‑
b的涡轮分子泵的横截面图,
[0090]
图5示出沿图2所示的剖面线c
‑
c的涡轮分子泵的横截面图,以及
[0091]
图6示出作为根据本发明的真空系统的组件的根据本发明的真空泵的一个可能的实施例。
[0092]
附图标记列表
[0093]
111、11涡轮分子泵
[0094]
113、13入口法兰
[0095]
115泵入口
[0096]
117泵出口
[0097]
119,19壳体
[0098]
121、21下部件
[0099]
123,23电子部件壳体
[0100]
125、25电机
[0101]
127、27附件接头
[0102]
129、29数据接口
[0103]
131电源接头
[0104]
133溢流入口
[0105]
135保护气体接头
[0106]
137电机室
[0107]
139冷却剂接头
[0108]
141底侧
[0109]
143螺钉
[0110]
145轴承盖
[0111]
147固定钻孔
[0112]
148冷却剂管线
[0113]
149、49转子
[0114]
151、51旋转轴线
[0115]
153.53转子轴
[0116]
155转子盘
[0117]
157定子盘
[0118]
159间隔环
[0119]
161转子毂
[0120]
163霍尔维克转子套筒
[0121]
165霍尔维克转子套筒
[0122]
167霍尔维克定子套筒
[0123]
169霍尔维克定子套筒
[0124]
171霍尔维克间隙
[0125]
173霍尔维克间隙
[0126]
175霍尔维克间隙
[0127]
179连接通道
[0128]
181、81滚动轴承
[0129]
183、83永磁轴承
[0130]
185注塑螺母
[0131]
187盘
[0132]
189插件
[0133]
191、91转子侧的半轴承
[0134]
193、93定子侧的半轴承
[0135]
195环形磁体
[0136]
197环形磁体
[0137]
199轴承间隙
[0138]
201承载件部段
[0139]
203承载件部段
[0140]
205、105径向支柱
[0141]
207覆盖元件
[0142]
209支撑环
[0143]
211固定环
[0144]
213盘式弹簧
[0145]
215紧急或安全轴承
[0146]
217电机定子
[0147]
219中间空间
[0148]
221壁部
[0149]
223迷宫式密封件
[0150]
12真空系统
[0151]
14惯性测量单元
[0152]
16惯性传感器
[0153]
18控制装置
[0154]
20存储装置
[0155]
22真空套管,电路板
[0156]
24真空系统的系统控制装置
具体实施方式
[0157]
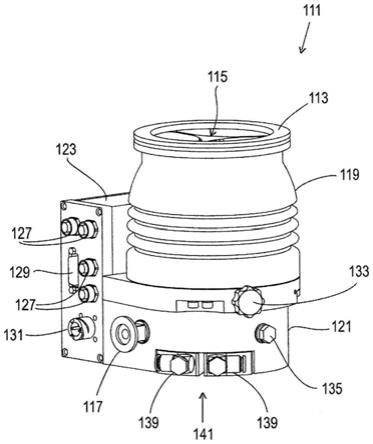
图1中所示的涡轮分子泵111包括泵入口115,该泵入口由入口法兰113包围,未示出的真空腔可以以本身已知的方式连接到该泵入口。来自真空腔的气体可以经由泵入口115从真空腔中抽出,并穿过泵运动至泵出口117,可以将预真空泵,即例如叶轮式回转泵连接到该泵出口。
[0158]
在根据图1的真空泵的定向中,入口法兰113形成真空泵111的壳体119的上端部。壳体119包括下部件121,电子部件壳体123设置在该下部件的侧向。将真空泵111的电气和/或电子部件安置在电子部件壳体123中,例如以运行设置在真空泵中的电机125(也参见图3)。在电子部件壳体123处设有用于附件的多个接头127。另外,例如根据rs485标准的数据接口129和供电接头131设置在电子部件壳体123处。
[0159]
也存在这样的涡轮分子泵,该涡轮分子泵不具有这样附接的电子部件壳体,而是连接到外部的驱动电子部件处。
[0160]
在涡轮分子泵111的壳体119处设有特别是溢流阀形式的溢流入口133,经由该溢流入口可以对真空泵111进行溢流。此外,在下部件121的区域中还设置有也称为吹扫气体接头的保护气体接头135,通过该保护气体接头可以使吹扫气体进入电机室137中,以保护电机125(例如参见图3)免受输送给泵的气体影响,在该电机室中将电机125中安装在真空
泵111中。此外,在下部件121中还设置有两个冷却剂接头139,其中冷却剂接头之一设置为入口并且将另一冷却剂接口设为用于冷却剂的出口,该冷却器为了冷却目的可以导入真空泵中。仅借助空气冷却装置运行其他存在的涡轮分子真空泵(未示出)行。
[0161]
真空泵的底侧141可以用作支承面,使得真空泵111可以以直立在底侧141上的方式运行。但是,真空泵111也可以经由入口法兰113固定在真空腔处,进而一定程度保持悬挂。此外,可以将真空泵111设计成,使得其当以与图1所示不同的方式取向时也可以投入运行。还可以实现真空泵的如下实施例,其中,底侧141不可以向下定向地设置,而是朝向侧部或朝上定向地设置。在此,原则上任意角度是可行的。
[0162]
特别地,大于在此示出的泵的其他存在的涡轮分子真空泵(未示出)可以不以直立的方式运行。
[0163]
在图2中示出的底侧141处还设置有各种螺钉143,借助该螺钉将在此未进一步具体化的真空泵构件相互固定。例如,轴承盖145固定在底侧141处。
[0164]
在底侧141上还设置有固定钻孔147,泵111可经由该固定钻孔固定在支承面上。这在尤其大于在此示出的泵的其他存在的涡轮分子真空泵(未示出)中是不可行的。
[0165]
在图2至图5中示出冷却剂管线148,经由冷却剂接头139引入和导出的冷却剂可以在该冷却剂管线中循环。
[0166]
如图3至图5的剖视图所示,真空泵包括多个过程气体泵级,以将存在于泵入口115处的过程气体运送至泵出口117。
[0167]
转子149设置在壳体119中,该转子具有能够绕旋转轴线151转动的转子轴153。
[0168]
涡轮分子泵111包括彼此泵送有效地串联连接的多个涡轮分子泵级,该涡流分子泵级具有多个固定在转子轴153处的径向的转子盘155和设置在转子盘155之间的且固定在壳体119中的定子盘157。在此,转子盘155和相邻的定子盘157分别形成涡轮分子泵级。定子盘157通过间隔环159彼此保持期望的轴向间距。
[0169]
真空泵还包括沿径向方向彼此交错地设置的且泵送有效地彼此串联的霍尔维克泵级,存在不具有霍尔维克泵级(holweck
‑
pumpstufen)的其他的涡轮分子真空泵(未示出)。
[0170]
霍尔维克泵级的转子包括设置在转子轴153处的转子毂161和两个固定在转子毂161处的且由该转子毂承载的缸套形的霍尔维克转子套筒163、165,该霍尔维克转子套筒与转子轴线151同轴地取向并且沿径向方向彼此嵌套。此外,设有两个缸套形的霍尔维克定子套筒167、169,该霍尔维克定子套筒也与旋转轴线151同轴地定向,并且在径向方向上观察彼彼此嵌套。
[0171]
霍尔维克泵级的泵送有效的表面通过霍尔维克转子套筒163、165和霍尔维克定子套筒167、169的侧表面、即通过径向的内面和/或外面形成。外部霍尔威特定子套筒167的径向内面与外部霍尔维克转子套筒163的径向外面相对置以构成径向霍尔维克间隙171,并借助该径向外面形成随涡轮分子泵之后的第一霍尔维克泵级。外部霍夫转子套筒163的径向内面与内部霍夫定子套筒169的径向外面相对置以构成径向霍夫间隙173,并借助该径向内面形成第二霍夫威克泵送级。内部霍克定子套筒169的径向内面与内部霍克转子套筒165的径向外面相对置以构成径向霍克间隙175,并借助该径向内面形成第三霍夫威克泵送级。
[0172]
在霍尔维克转子套筒163的下端部处可以设有径向伸展的通道,经由该通道将径
向位置的霍尔维克间隙171与中间的霍尔维克间隙173连接。此外,可以在内部霍夫定子套筒169的上端部处设有径向伸展的通道,经由该通道将中间的霍克间隙173与径向内置的霍克间隙175连接。由此,彼此嵌套的霍尔维克泵级彼此串联连接。此外,可以将到出口117的连接通道179设置在径向内置的霍尔维克转子套筒165的下端部处。
[0173]
霍尔维克定子套筒167、169的前述的泵送有效的表面分别具有多个螺旋形围绕旋转轴线151沿轴向方向伸展的霍尔维克凹槽,而霍尔维克转子套筒163、165的相对置的侧表面是光滑的,并且将气体为了运行真空泵111预驱动到霍尔维克凹槽中。
[0174]
为了转动地支承转子轴153在泵出口117的区域设有滚动轴承181,并且在泵入口115的区域中设有永磁轴承183。
[0175]
在滚动轴承181的区域中设有具有朝滚动轴承181增加的外径的锥形的注模螺母185。注塑螺母185与工作介质存储器的至少一个顶出器处于滑动接触。在其他存在的涡轮分子真空泵(未示出)中,可以代替注塑螺杆设有注塑螺钉。因为因此不同的实施方案是可行的,所以在该上下文中也可以使用术语“注塑嘴”。
[0176]
工作介质储存器包括多个彼此堆叠的吸盘187,该吸盘用于滚动轴承181的工作介质、例如用润滑剂浸渍。
[0177]
在真空泵111的运行中,工作介质通过毛细作用从工作介质储存器经由顶出器被转移到旋转的注塑螺母185上,并且由于离心力而沿着注塑螺母185朝注塑螺母185的外径变大的方向上朝滚动轴承181运输,在那里该工作介质例如履行润滑作用。滚动轴承181和工作介质存储器通过盆形的插入件189和轴承盖145围住在真空泵中。
[0178]
永磁轴承183包括转子侧的轴承半部191和定子侧的轴承半部193,该轴承半部分别包括由多个沿轴向方向彼此堆叠的永磁的环195、197构成的环堆叠。环形磁体195、197彼此相对置以构成径向的轴承间隙199,其中转子侧的环形磁体195径向地设置在外部,并且定子侧的环形磁体197径向地设置在内部。存在于轴承间隙199中的磁场在环形磁体195、197之间引起磁排斥力,该磁排斥力引起转子轴153的径向支承。转子侧的环形磁体195由转子轴153的承载部段201承载,该承载部段径向外侧围绕环形磁体195。定子侧的环形磁体197由定子侧的承载部段203承载,该承载部段延伸穿过环形磁体197,并悬挂在壳体119的径向支柱205处。转子侧的环形磁体195通过与承载部段201耦联的盖元件207平行于旋转轴线151固定。定子侧的环形磁体197通过与承载部段203连接的固定环209以及与承载部段203连接的固定环211沿着一个方向平行于旋转轴线151固定。此外,板簧213可以设置在固定环211和环形磁体197之间。
[0179]
紧急或安全轴承215设置在磁性轴承内部,该紧急或安全轴承215在真空泵111的正常运行中在没有接触的情况下空转,并且与转子149相对于定子过度径向偏转的情况下才形成接合,以便形成用于转子149的径向止挡,以便防止转子侧的结构与定子侧的结构碰撞。安全轴承215构成为未润滑的滚动轴承,并且与转子149和/或定子形成径向间隙,该径向间隙引起:安全轴承在正常泵运行中脱离接合。其中安全轴承215形状接合的径向偏转足够大,使得安全轴承215在真空泵215的正常运行中不形成接合,并且同时足够小,使得在任何情况下都防止转子侧的结构与定子侧的结构碰撞。
[0180]
真空泵111包括用于转动驱动转子149的电机125。电机125的电枢通过转子149形成,该转子的转子轴153延伸穿过电机定子217。永磁体装置可以在径向瓦侧或以嵌入的方
式设置在转子轴153的延伸穿过电机定子217的部段上。在电机定子217和转子149的延伸穿过电机定子217的部段之间设置有中间空间219,该中间空间包括径向电机间隙,电机定子217和永磁体装置可经由该电机间隙磁性影响以传递驱动力矩。
[0181]
电机定子217在壳体中固定在为电机125所设的电机室137内。保护气体体可以经由保护气体接头135到达电机室137中,其中该保护气体也可以称为吹扫气体并且其例如为空气或氮气。可以经由保护气体保护电机125免受过程气体的影响、例如免受过程气体的腐蚀性作用的份额的影响。电机室137也可以经由泵出口117抽真空,即由连接在泵出口117处的预真空泵引起的真空压力至少近似地在电机室137中占主导。
[0182]
此外,可以在转子毂161和对电机室137限界的壁部221之间设置所谓的且本身已知的迷宫式密封件223,尤其以便实现相对于径向外置的霍尔维克泵级对电机室217的更好的密封。
[0183]
图6基于图3的图示并且以贯穿根据本发明的涡轮泵的横截面示出根据本发明的涡轮分子真空泵,该涡轮分子真空泵在下文中还简化地称作为涡轮分子泵或称作为涡轮泵,该贯穿根据本发明的涡轮泵的横截面对应于图3的横截面。
[0184]
如在图6的实施例中所示,本发明因此可以结合如之前根据图1至5描述的涡轮分子泵使用。
[0185]
因此,根据本发明的涡轮泵11具有带有轴53的转子49,该轴在运行中借助于电动电机25围绕旋转轴线51处于转动中。
[0186]
转子49设有混合支承装置。在vv侧(图6中下部)上,为转子49设有滚动轴承81。在hv侧(图6中上部)上,转子49通过永磁体轴承83支承,该永磁体轴承具有转子侧的轴承半部91和定子侧的轴承半部93。
[0187]
真空泵11具有与下部件21连接的外壳体19。在hv侧上、即在泵入口处,壳体19在入口法兰13的区域中具有所谓的星形件,该星形件包括多个径向支柱105,该支柱在中央、即在转子轴线51上会聚。
[0188]
电子部件壳体23可拆卸地附接在壳体19和下部件21的外侧。此外,在电子部件壳体23中存在用于真空泵11的、特别是用于电动电机25的、但是也用于真空泵11的可能的其他的部件(未示出)、即例如传感器等的控制和驱动电子部件(未示出)。
[0189]
电子部件壳体23经由电插接触点连接,其中泵送侧的触点在真空泵11的下部件21的区域中构成在用作为真空套管的电路板22处。
[0190]
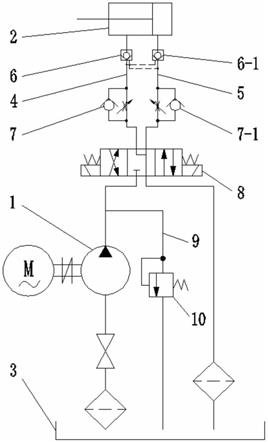
在此处示出的实施例中,根据本发明的真空泵11是真空系统12的组件,这在此仅示意性地通过虚线表明。真空系统12例如可以形成泵站,该泵站包括要借助于真空泵11抽真空的真空室和分配给真空泵11的初级泵(未示出)。
[0191]
原则上,真空系统12可以任意复杂地构建,并且例如包括一个或多个真空室并且除了根据本发明的真空泵之外包括一个或多个另外的真空泵,该另外的真空泵可以以根据本发明的方式构成或者不以根据本发明的方式构成。真空系统12可以移动式或半移动式地构成。
[0192]
真空系统12具有系统控制装置24,经由该系统控制装置可以操控真空系统12的所有组件和部件,并且该系统控制装置实现控制信号和数据的交换。
[0193]
根据本发明的真空泵11可以例如经由数据接口29与系统控制装置24连接,该数据
接口构成在真空泵11的电子部件壳体23处。如图6所示,在该电子部件壳体23处还设有附件端口27。
[0194]
根据本发明的真空泵11构成用于执行根据本发明的监控方法的一个或多个实施例。根据本发明的真空系统12同样构成用于执行根据本发明的监控方法的一个或多个实施例。
[0195]
根据本发明,真空泵11设有惯性测量单元14,该惯性测量单元固定地附接在泵11的组件处。为了说明在本发明的范围中可以将惯性测量单元14设置在真空泵11的不同部位处,在图6中纯示例地示出两个不同的附接位置。
[0196]
根据本发明的一个可能的设计方案,惯性测量单元14在泵入口处设置在上面提及的、包括多个径向支柱105的星形件处,更确切地说相对于旋转轴线51中央地设置。可选地,也可以提出将惯性测量单元14偏心地设置在真空泵11的星形件处。
[0197]
根据本发明的另一实施例,惯性测量单元14附接在所提及的电路板22处,该电路板在泵11的下部件21处形成真空套管。
[0198]
原则上,根据本发明可行的是:在真空泵11处设有多于一个惯性测量单元14。
[0199]
如图6左上方的放大示意图所示,惯性测量单元14包括多个(在该示例中六个)惯性传感器16。在一个优选的实施例中,如已经作为示例在前文部分中提及的那样,设有三个加速度传感器以及三个转速传感器,以便以该方式覆盖真空泵11的运动的所有六个可行的自由度。
[0200]
就根据本发明的真空泵11以及根据本发明的真空系统12的可能的应用而言,为了避免重复参考导言部分,其中该监控方法可以借助上面根据图6描述的根据本发明的真空泵11以及所描述的真空系统12来执行。
[0201]
因此,本发明基于分配给真空泵的惯性测量单元的测量数据创建用于监控真空泵和真空系统状态的简单、可靠和便宜的可行性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。