1.本发明涉及作业车辆。
2.以往,已知作为代表性的作业车辆的起重机。起重机主要由行驶体和回转体构成。行驶体具备多个车轮,能够自行。回转体不仅具备臂而且具备钢缆、钩,能够在吊起了货物的状态下对其进行搬运。
3.另外,存在如下起重机,该起重机具备:入口节流回路,从工作油泵向液压设备引导工作油;出口节流回路,从液压设备向工作油箱引导工作油;以及泄放回路,从工作油泵以不经由液压设备的方式向工作油箱引导工作油(参照专利文献1)。该起重机即使工作油泵的动作状态与发动机被施加的负荷相应地变化,也通过调节泄放回路的开口面积从而提高了操作性能。
4.关于这点,专利文献1所公开的起重机在控制器中存储着操作机构的操作量与泄放节流机构的前后压差之间的关系。操作机构的操作量与泄放节流机构的前后压差之间的关系需要至少按每个机型反复进行实机试验、模拟来取得。因此,这样的起重机存在研究开发所需的时间以及金钱上的成本变多的问题。于是,需要能够提高操作性能,而且能够减少研究开发所需的时间以及金钱上的成本的技术。
5.在先技术文献
6.专利文献
7.专利文献1:日本特许第3626590号公报
技术实现要素:
8.发明所要解决的课题
9.提供能够提高操作性能而且减少研究开发所需的时间以及金钱上的成本的技术。
10.用于解决课题的手段
11.在本发明的作业车辆中,具备:
12.液压设备;
13.工作油泵;
14.工作油箱;
15.入口节流回路,从所述工作油泵向所述液压设备引导工作油;
16.出口节流回路,从所述液压设备向所述工作油箱引导工作油;
17.泄放回路,从所述工作油泵以不经由所述液压设备的方式向所述工作油箱引导工作油;以及
18.工作油控制阀,通过阀芯的滑动来调节所述入口节流回路及所述出口节流回路及所述泄放回路各自的开口面积,
19.所述作业车辆具备:
20.供操作员操作的操作工具;以及
21.控制器,基于所述操作工具的操作量决定送往所述液压设备的工作油的目标流
量,
22.所述控制器基于从所述工作油泵送出的工作油的流量以及送往所述液压设备的工作油的目标流量,计算泄放目标流量,基于从所述工作油泵送出的工作油的压力以及所述工作油箱中的工作油的压力,计算泄放节流压差,基于所述泄放目标流量和所述泄放节流压差计算泄放目标开口面积,并对所述工作油控制阀进行控制以成为该泄放目标开口面积。
23.在本发明的作业车辆中,
24.所述控制器在将所述泄放目标流量设为qb,将所述泄放节流压差设为pp
‑
pr,将流量系数设为cf,将工作油密度设为ρ的情况下,使用下式计算所述泄放目标开口面积。
25.[式1]
[0026]
泄放目标开口面积:
[0027]
在本发明的作业车辆中,
[0028]
所述控制器基于所述液压设备的目标动作速度和所述液压设备的实际动作速度计算速度偏差,并对所述工作油控制阀进行控制以使该速度偏差变小。
[0029]
在本发明的作业车辆中,
[0030]
所述控制器以所述速度偏差为比例项,以对所述比例项以及基于所述速度偏差计算的积分项及微分项分别乘以增益的方式,对所述工作油控制阀进行控制以使所述速度偏差变小。
[0031]
在本发明的作业车辆中,
[0032]
如果所述液压设备的目标动作速度成为零之后所述液压设备的实际动作速度变得比阈值小,则所述控制器对所述工作油控制阀进行控制以切断送往所述液压设备的工作油。
[0033]
在本发明的作业车辆中,
[0034]
所述控制器基于与动作停止时相关的模式的选择状况来变更所述阈值。
[0035]
发明效果
[0036]
在本发明的作业车辆中,具备供操作员操作的操作工具、以及基于操作工具的操作量决定送往液压设备的工作油的目标流量的控制器。另外,控制器基于从工作油泵送出的工作油的流量以及送往液压设备的工作油的目标流量,计算泄放目标流量,基于从工作油泵送出的工作油的压力以及工作油箱中的工作油的压力,计算泄放节流压差,基于泄放目标流量和泄放节流压差计算泄放目标开口面积,并对工作油控制阀进行控制以成为泄放目标开口面积。根据该作业车辆,即使工作油泵的动作状态与发动机被施加的负荷相应地变化,通过调节泄放回路的开口面积,也能够使操作工具的操作量与送往液压设备的工作油的流量成比例。因此,能够实现顺从于操作员的操作的操作特性。进而能够提高操作性能。另外,只要在控制器中存储与工作油的目标流量相关的信息、与泄放回路的开口面积相关的信息即可,因此能够减少研究开发所需的时间以及金钱上的成本。
[0037]
在本发明的作业车辆中,控制器在将泄放目标流量设为qb,将泄放节流压差设为pp
‑
pr,将流量系数设为cf,将工作油密度设为ρ的情况下,使用下式计算泄放目标开口面积。根据该作业车辆,能够通过简化的程序得到上述的效果。即,能够提高操作性能。另外,
能够减少研究开发所需的时间以及金钱上的成本。
[0038]
[式1]
[0039]
泄放目标开口面积:
[0040]
在本发明的作业车辆中,控制器基于液压设备的目标动作速度以及液压设备的实际动作速度计算速度偏差,并对工作油控制阀进行控制以使速度偏差变小。根据该作业车辆,即使受到大的干扰,也能够实现顺从于操作员的操作的操作特性。进而能够提高操作性能。
[0041]
在本发明的作业车辆中,控制器以速度偏差为比例项,以对比例项以及基于速度偏差计算的积分项及微分项分别乘以增益的方式,对工作油控制阀进行控制以使速度偏差变小。根据该作业车辆,能够通过简化的程序得到上述的效果。即,能够提高操作性能。
[0042]
在本发明的作业车辆中,如果液压设备的目标动作速度成为零之后液压设备的实际动作速度变得比阈值小,则控制器对工作油控制阀进行控制以切断送往液压设备的工作油。根据该作业车辆,能够在液压设备停止时兼顾适宜的高速响应和适宜的冲击抑制。进而能够提高操作性能。
[0043]
在本发明的作业车辆中,控制器基于与动作停止时相关的模式的选择状况来变更阈值。根据该作业车辆,能够实现更重视高速响应的操作特性或更重视冲击抑制的操作特性。进而能够提高操作性能。
附图说明
[0044]
图1是表示起重机的图。
[0045]
图2是表示驾驶舱的内部的图。
[0046]
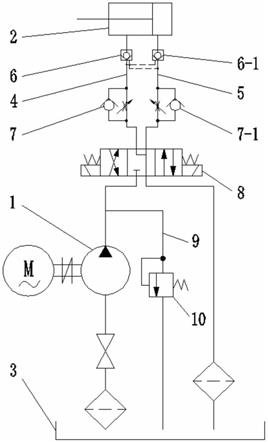
图3是表示液压系统的结构的图。
[0047]
图4是表示阀芯的滑动量与各回路的开口面积之间的关系的图。
[0048]
图5是表示第一实施方式所涉及的控制系统的结构的图。
[0049]
图6是表示控制系统中的前馈控制部的图。
[0050]
图7是表示控制系统中的反馈控制部的图。
[0051]
图8是表示回转体的回转动作和先导油的压力波形的图。
[0052]
图9是表示第二实施方式所涉及的控制系统的结构的图。
[0053]
图10是表示回转体的回转动作和送往回转用马达的工作油的压力波形的图。
具体实施方式
[0054]
本技术所公开的技术思想不仅能够适用于以下说明的起重机1,而且还能够适用于其他起重机。
[0055]
首先,使用图1及图2,关于起重机1进行说明。
[0056]
起重机1主要由行驶体2和回转体3构成。
[0057]
行驶体2具备左右一对前轮4和后轮5。另外,行驶体2具备在进行货物的搬运作业时触地以实现稳定的外伸支腿6。此外,行驶体2通过液压设备使其上部支承的回转体3回转自如。
[0058]
回转体3以从其后部向前方突出的方式具备臂7。因此,臂7通过液压设备而回转自如(参照箭头a)。另外,臂7通过液压设备而伸缩自如(参照箭头b)。进而,臂7通过液压设备而起伏自如(参照箭头c)。
[0059]
而且,在臂7上架设着钢缆8。在从臂7的前端部分垂下的钢缆8上安装有钩9。另外,在臂7的基端侧附近配置有卷扬机10。卷扬机10与液压设备一体地构成,能够进行钢缆8的卷入及卷出。因此,钩9通过液压设备而升降自如(参照箭头d)。此外,回转体3在臂7的侧方具备驾驶舱11。在驾驶舱11的内部,不仅设置有控制器20(参照图3),而且设置有回转触杆21、伸缩触杆22、起伏触杆23、卷绕触杆24。
[0060]
控制器20主要具有信息存储部和信息处理部。信息存储部存储着起重机1的控制所需的各种信息(程序等)。另外,信息处理部将各种触杆21~24的操作量转换为电信号,对各个液压设备进行控制。这样,控制器20实现臂7的运行(回转动作、伸缩动作、起伏动作)及卷扬机10的运行(卷入动作、卷出动作)。
[0061]
详细进行说明,臂7通过液压设备而回转自如(参照图1中的箭头a)。在本技术中,将该液压设备定义为回转用马达31。回转用马达31通过后述的工作油控制阀37而适宜地运行。也就是说,回转用马达31通过工作油控制阀37切换工作油的流量及流动方向而适宜地运行。此外,回转用马达31的动作速度由传感器25(参照图3)检测。
[0062]
另外,臂7通过液压设备而伸缩自如(参照图1中的箭头b)。在本技术中,将该液压设备定义为伸缩用油缸32。伸缩用油缸32通过其他工作油控制阀而适宜地运行。也就是说,伸缩用油缸32通过工作油控制阀切换工作油的流量及流动方向而适宜地运行。此外,伸缩用油缸32的动作速度由传感器(未图示)检测。
[0063]
进而,臂7通过液压设备而起伏自如(参照图1中的箭头c)。在本技术中,将该液压设备定义为起伏用油缸33。起伏用油缸33通过其他工作油控制阀而适宜地运行。也就是说,起伏用油缸33通过工作油控制阀切换工作油的流量及流动方向而适宜地运行。此外,起伏用油缸33的动作速度由传感器(未图示)检测。
[0064]
而且,钩9通过液压设备而升降自如(参照图1中的箭头d)。在本技术中,将该液压设备定义为卷绕用马达34。卷绕用马达34通过其他工作油控制阀而适宜地运行。也就是说,卷绕用马达34通过工作油控制阀切换工作油的流量及流动方向而适宜地运行。此外,卷绕用马达34的动作速度由传感器(未图示)检测。
[0065]
接下来,使用图3及图4,关于液压系统30的结构进行说明。
[0066]
液压系统30使作为液压设备之一的回转用马达31运行。液压系统30具有工作油泵35和工作油箱36。另外,液压系统30具有工作油控制阀37。
[0067]
工作油泵35向回转用马达31送出工作油。工作油泵35由回路41连接到工作油控制阀37。另外,工作油控制阀37由回路42及回路43连接到回转用马达31。因此,在工作油控制阀37的阀芯向一方进行了滑动时,工作油经过回路41、42向回转用马达31流动,在阀芯向另一方进行了滑动时,工作油经过回路41、43向回转用马达31流动。此时,各回路42、43的开口面积(端口的开口面积:参照图4)与阀芯的滑动量相应地变化,因此能够调节工作油的流量。此外,将从工作油泵35向回转用马达31引导工作油的回路(41、42或者41、43)称为“入口节流回路”。以后作为入口节流回路4a。
[0068]
工作油箱36蓄积从回转用马达31返回的工作油。回转用马达31由回路42及回路43
连接到工作油控制阀37。另外,工作油控制阀37由回路44连接到工作油箱36。因此,在工作油控制阀37的阀芯向一方进行了滑动时,工作油经过回路43、44向工作油箱36流动,在阀芯向另一方进行了滑动时,工作油经过回路42、44向工作油箱36流动。此时,回路44的开口面积(端口的开口面积:参照图4)与阀芯的滑动量相应地变化,因此能够调节工作油的流量。此外,将从回转用马达31向工作油箱36引导工作油的回路(43、44或者42、44)称为“出口节流回路”。以后作为出口节流回路4b。
[0069]
而且,在本液压系统30中,从回路41分支的回路45也与工作油控制阀37相连。另外,从回路42及回路43分支的回路46也与工作油控制阀37相连。进而,从回路46分支的回路47与工作油箱36相连。工作油控制阀37在阀芯位于中立位置时以及无论向哪一方向进行了滑动时将回路45与回路46相连(中间旁通形)。因此,在工作油控制阀37的阀芯位于中立位置时以及无论向哪一方向进行了滑动时,工作油经过回路45、46、47向工作油箱36流动。此时,回路46的开口面积(端口的开口面积:参照图4)与阀芯的滑动量相应地变化,因此能够调节工作油的流量。此外,将从工作油泵35以不经由回转用马达31的方式向工作油箱36引导工作油的回路(45、46、47)称为“泄放回路”。以后作为泄放回路4c。
[0070]
进而,在本液压系统30中,通过先导油的压力使工作油控制阀37的阀芯滑动。为了使先导油成为与回转触杆21的操作量相应的压力而设置有先导液压控制阀38。在先导液压控制阀38上连接着向工作油控制阀37的一端侧油室引导工作油的回路48。因此,如果操作员握住回转触杆21并将其向一方倾倒,则通过与其操作量相应的先导油的压力将工作油控制阀37的阀芯向一方推压。此时,回转触杆21的操作量与阀芯的滑动量成为比例关系。另外,在先导液压控制阀38上连接着向工作油控制阀37的另一端侧油室引导工作油的回路49。因此,如果操作员握住回转触杆21并将其向另一方倾倒,则通过与其操作量相应的先导油的压力将工作油控制阀37的阀芯向另一方推压。此时,回转触杆21的操作量与阀芯的滑动量也成为比例关系。
[0071]
另外,工作油泵35通过发动机39而动作。因此,如果发动机39被施加的负荷变化,则工作油泵35的动作状态也变化。也就是说,如果发动机39被施加的负荷增大,则发动机39的旋转速度下降,因此工作油泵35的动作速度也下降。于是,从工作油泵35送出的工作油的流量减少。相反,如果发动机39被施加的负荷减少,则发动机39的旋转速度上升,因此工作油泵35的动作速度也上升。于是,从工作油泵35送出的工作油的流量增加。此外,发动机39的旋转速度由传感器26检测。发动机39的旋转速度与工作油泵35的动作速度是同义的。进而,泄放回路4c中的工作油控制阀37的前后压差(以后称为“泄放节流压差”)相当于从工作油泵35送出的工作油的压力与工作油箱36中的工作油的压力之差。因此,在本起重机1中,由传感器27检测从工作油泵35送出的工作油的压力,由传感器28检测工作油箱36中的工作油的压力。但是,工作油箱36中的工作油的压力如果认为等于大气压,则不一定需要传感器28。
[0072]
以下使用图5至图8,关于第一实施方式所涉及的控制系统50的结构进行说明。在此,说明中的标记(a)、(b)、(c)
……
与图中的标记(a)、(b)、(c)
……
一致。
[0073]
控制系统50使工作油控制阀37的阀芯适宜地滑动。控制系统50具有前馈控制部51和反馈控制部52。
[0074]
首先,关于前馈控制部51进行说明。前馈控制部51从回转体3开始回转动作起直到
停止为止连续地发挥功能。
[0075]
前馈控制部51基于传感器26的检测信号掌握发动机39的旋转速度ne(a)。然后,基于发动机39的旋转速度ne,计算从工作油泵35送出的工作油的流量(b)。同时,前馈控制部51掌握与回转触杆21的操作量对应的回转用马达31的目标动作速度st(c)。然后,基于回转用马达31的目标动作速度st,计算送往回转用马达31的工作油的目标流量(d)。其后,前馈控制部51基于从工作油泵35送出的工作油的流量以及送往回转用马达31的工作油的目标流量,计算泄放目标流量qb。
[0076]
另外,前馈控制部51基于传感器27的检测信号,掌握从工作油泵35送出的工作油的压力pp(e)。前馈控制部51针对该压力波形施加低通滤波器(f)。同时,前馈控制部51基于传感器28的检测信号,掌握工作油箱36中的工作油的压力pr(g)。此时,工作油箱36中的工作油的压力也可以作为等于大气压而机械性地设为0mpa。其后,前馈控制部51基于从工作油泵35送出的工作油的压力pp以及工作油箱36中的工作油的压力pr,计算泄放节流压差pp
‑
pr。
[0077]
进而,前馈控制部51根据泄放目标流量qb和泄放节流压差pp
‑
pr,计算泄放目标开口面积at(h)。此时,设为前馈控制部51使用下式(孔口的算式)计算泄放目标开口面积at。此外,在该式子中,将流量系数设为cf,将工作油密度设为ρ。
[0078]
[式1]
[0079]
泄放目标开口面积:
[0080]
而且,前馈控制部51基于表现阀芯的滑动量与泄放回路4c的开口面积之间的关系的转换表,读取阀芯目标滑动量dt(i)。也就是说,读取使得泄放回路4c的开口面积成为泄放目标开口面积at的阀芯目标滑动量dt。其后,前馈控制部51基于表现先导油的压力与阀芯的滑动量之间的关系的转换表,读取先导油目标压力pt(j)。也就是说,读取使得阀芯的滑动量成为阀芯目标滑动量dt的先导油目标压力pt。像这样,前馈控制部51决定先导油目标压力pt。此外,先导油目标压力pt被转换为先导液压控制阀38的操作电压ov(k)。
[0081]
接下来,关于反馈控制部52进行说明。反馈控制部52也从回转体3开始回转动作起直到停止为止连续地发挥功能。
[0082]
反馈控制部52掌握与回转触杆21的操作量对应的回转用马达31的目标动作速度st(l)。这与回转体3的目标回转速度是同义的。同时,反馈控制部52基于传感器25的检测信号,掌握回转用马达31的实际动作速度sa(m)。这与回转体3的实际回转速度是同义的。其后,反馈控制部52基于回转用马达31的目标动作速度st以及回转用马达31的实际动作速度sa,计算速度偏差st
‑
sa。
[0083]
另外,反馈控制部52对比例项乘以预先决定的增益(比例增益kp)来计算操作量(n),该比例项是速度偏差st
‑
sa。该控制方法由于使操作量与偏差成比例地变化,因此被称为比例控制。一般而言在施加比例控制时,偏差越小则操作量越小,偏差越大则操作量越大。如果适宜地决定了比例增益kp,则使偏差收敛的动作会提早开始。
[0084]
进而,反馈控制部52对基于速度偏差st
‑
sa计算的积分项乘以预先决定的增益(积分增益ki)来计算操作量(o)。该控制方法由于使操作量与偏差的积分成比例地变化,因此被称为积分控制。一般而言在施加积分控制时,偏差的积分越小则操作量越小,偏差的积分
越大则操作量越大。如果适宜地决定了积分增益ki,则虽然稍微耗时,但能够使偏差收敛。
[0085]
而且,反馈控制部52对基于速度偏差st
‑
sa计算的微分项乘以预先决定的增益(微分增益kd)来计算操作量(p)。该控制方法由于使操作量与偏差的微分成比例地变化,因此被称为微分控制。一般而言在施加微分控制时,偏差的微分越小则操作量越小,偏差的微分越大则操作量越大。如果适宜地决定了微分增益kd,则能够抑制过冲、振动现象。
[0086]
通过这样的控制系统50,控制器20能够总是向先导液压控制阀38的放大器施加恰当的操作电压ov(q)。但是,反馈控制部52不限定于这样的pid控制。例如也可以是pi控制、pd控制或其他控制。
[0087]
关于控制系统50的效果示出一例如下。即,即使回转触杆21的操作量是相同的,但如果发动机39的旋转速度ne低,则从工作油泵35送出的工作油减少。于是,通过提高先导油的压力来增大阀芯的滑动量,从而减少泄放回路4c的流量。对此,根据图8的(a)及(b),可知从开始回转动作直到停止回转动作为止,先导油的压力都被维持得高。相反,即使回转触杆21的操作量是相同的,如果发动机39的旋转速度ne高,则从工作油泵35送出的工作油增多。于是,通过降低先导油的压力来减小阀芯的滑动量,从而增加泄放回路4c的流量。对此,根据图8的(c)及(d),可知从开始回转动作直到停止回转动作为止,先导油的压力都被维持得低。
[0088]
如上,本起重机1具备供操作员操作的操作工具(回转触杆21)、以及基于操作工具(21)的操作量决定送往液压设备(回转用马达31)的工作油的目标流量的控制器20。另外,控制器20基于从工作油泵35送出的工作油的流量以及送往液压设备(31)的工作油的目标流量,计算泄放目标流量qb,基于从工作油泵35送出的工作油的压力pp以及工作油箱36中的工作油的压力pr,计算泄放节流压差pp
‑
pr,基于泄放目标流量qb和泄放节流压差pp
‑
pr计算泄放目标开口面积at,并对工作油控制阀37进行控制以成为泄放目标开口面积at。根据该起重机1,即使工作油泵35的动作状态与发动机39被施加的负荷相应地变化,通过调节泄放回路4c的开口面积,也能够使操作工具(21)的操作量与送往液压设备(31)的工作油的流量成比例。因此,能够实现顺从于操作员的操作的操作特性。进而能够提高操作性能。另外,至少在控制器20中存储与工作油的目标流量相关的信息、与泄放回路4c的开口面积相关的信息即可,因此能够减少研究开发所需的时间以及金钱上的成本。
[0089]
另外,在本起重机1中,控制器20在将泄放目标流量设为qb,将泄放节流压差设为pp
‑
pr,将流量系数设为cf,将工作油密度设为ρ的情况下,使用下式计算泄放目标开口面积at。根据该起重机1,能够通过简化的程序得到上述的效果。即,能够提高操作性能。另外,能够减少研究开发所需的时间以及金钱上的成本。
[0090]
[式1]
[0091]
泄放目标开口面积:
[0092]
进而,在本起重机1中,控制器20基于液压设备(回转用马达31)的目标动作速度st以及液压设备(31)的实际动作速度sa计算速度偏差st
‑
sa,并对工作油控制阀37进行控制以使速度偏差st
‑
sa变小。根据该起重机1,即使受到大的干扰,也能够实现顺从于操作员的操作的操作特性。进而能够提高操作性能。
[0093]
而且,在本起重机1中,控制器20以速度偏差st
‑
sa为比例项,以对比例项以及基于
速度偏差st
‑
sa计算的积分项及微分项分别乘以增益的方式,对工作油控制阀37进行控制以使速度偏差st
‑
sa变小。根据该起重机1,能够通过简化的程序得到上述的效果。即,能够提高操作性能。
[0094]
以下使用图9及图10,关于第二实施方式所涉及的控制系统50的结构进行说明。在此,仅关于与第一实施方式所涉及的控制系统50不同的部分进行说明。
[0095]
控制系统50不仅具有前馈控制部51和反馈控制部52,而且具有分模式停止控制部53。分模式停止控制部53在回转体3停止回转动作时发挥功能。
[0096]
分模式停止控制部53能够通过开关29的操作来选择重视高速响应的模式和重视冲击抑制的模式。但是,也可以设为控制器20分析各种工作环境并自动地选择模式。
[0097]
分模式停止控制部53掌握先导液压控制阀38的操作电压ov。然后,分模式停止控制部53向先导液压控制阀38的放大器施加该操作电压ov(q)。同时,分模式停止控制部53掌握与回转触杆21的操作量对应的回转用马达31的目标动作速度st。另外,分模式停止控制部53基于传感器25的检测信号,掌握回转用马达31的实际动作速度sa。进而,分模式停止控制部53掌握与动作停止时相关的模式的选择状况。然后,如果在回转用马达31的目标动作速度st成为零之后回转用马达31的实际动作速度sa变得比阈值t小,则分模式停止控制部53对工作油控制阀37进行控制以切断送往回转用马达31的工作油(参照图10的(a)及(c)中的p点)。
[0098]
关于这点,分模式停止控制部53与选择的模式相应地变更阈值t。具体地说明,在选择了重视高速响应的模式的情况下,使阈值t向比通常时高的位置偏移(参照图10的(a)),在选择了重视冲击抑制的模式的情况下,使阈值t向比通常时低的位置偏移(参照图10的(c))。通过像这样,在选择了重视高速响应的模式的情况下,即使回转体3仍在持续进行回转动作,也切断送往回转用马达31的工作油,因此能够使其迅速地停止。相反,在选择了重视冲击抑制的模式的情况下,在回转体3停止回转动作或者大致停止回转动作时切断送往回转用马达31的工作油,因此能够使其平滑地停止。
[0099]
如上,在本起重机1中,如果在液压设备(回转用马达31)的目标动作速度st成为零之后液压设备(31)的实际动作速度sa变得比阈值t小,则控制器20对工作油控制阀37进行控制以切断送往液压设备(31)的工作油。根据该起重机1,在液压设备(31)停止时能够兼顾适宜的高速响应和适宜的冲击抑制。进而能够提高操作性能。
[0100]
另外,在本起重机1中,控制器20基于与动作停止时相关的模式的选择状况来变更阈值t。根据该起重机1,能够实现更重视高速响应的操作特性或更重视冲击抑制的操作特性。进而能够提高操作性能。
[0101]
最后,在本技术中,将液压设备设为回转用马达31,着眼于回转体3的回转动作进行了说明,但不限定于此。也就是说,本技术所公开的技术思想能够将液压设备设为伸缩用油缸32,适用于臂7的伸缩动作。另外,能够将液压设备设为起伏用油缸33,适用于臂7的起伏动作。进而,能够将液压设备设为卷绕用马达34,适用于卷扬机10的卷绕动作。而且,在本技术中,使用起重机1进行了说明,但不限定于此。也就是说,本技术所公开的技术思想能够适用于具备液压设备的全部作业车辆。
[0102]
附图标记说明
[0103]1ꢀꢀꢀꢀꢀ
起重机
[0104]2ꢀꢀꢀꢀꢀ
行驶体
[0105]3ꢀꢀꢀꢀꢀ
回转体
[0106]7ꢀꢀꢀꢀꢀ
臂
[0107]
20
ꢀꢀꢀꢀ
控制器
[0108]
21
ꢀꢀꢀꢀ
回转触杆(操作工具)
[0109]
22
ꢀꢀꢀꢀ
伸缩触杆(操作工具)
[0110]
23
ꢀꢀꢀꢀ
起伏触杆(操作工具)
[0111]
24
ꢀꢀꢀꢀ
卷绕触杆(操作工具)
[0112]
30
ꢀꢀꢀꢀ
液压系统
[0113]
31
ꢀꢀꢀꢀ
回转用马达(液压设备)
[0114]
32
ꢀꢀꢀꢀ
伸缩用油缸(液压设备)
[0115]
33
ꢀꢀꢀꢀ
起伏用油缸(液压设备)
[0116]
34
ꢀꢀꢀꢀ
卷绕用马达(液压设备)
[0117]
35
ꢀꢀꢀꢀ
工作油泵
[0118]
36
ꢀꢀꢀꢀ
工作油箱
[0119]
37
ꢀꢀꢀꢀ
工作油控制阀
[0120]
38
ꢀꢀꢀꢀ
先导液压控制阀
[0121]
50
ꢀꢀꢀꢀ
控制系统
[0122]
51
ꢀꢀꢀꢀ
前馈控制部
[0123]
52
ꢀꢀꢀꢀ
反馈控制部
[0124]
53
ꢀꢀꢀꢀ
分模式停止控制部
[0125]
4a
ꢀꢀꢀꢀ
入口节流回路
[0126]
4b
ꢀꢀꢀꢀ
出口节流回路
[0127]
4c
ꢀꢀꢀꢀ
泄放回路
[0128]
at
ꢀꢀꢀꢀ
泄放目标开口面积
[0129]
qb
ꢀꢀꢀꢀ
泄放目标流量
[0130]
pp
‑
pr 泄放节流压差
[0131]
t
ꢀꢀꢀꢀꢀ
阈值
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。