1.本公开涉及一种压缩机及其方法。
背景技术:
2.通常,冷却器系统将冷水提供给冷水需求处,并且其特征在于,在制冷系统中循环的制冷剂与在冷水需求处和制冷系统之间循环的冷水之间进行热交换以冷却冷水。这种冷却器系统是大容量的设备,并且可以安装在大型建筑物中。
3.在kr2010
‑
1084477中公开了一种常规的冷却器系统。在该公开文本中公开的冷却器系统中,由旋转的压缩机引起的浪涌现象是个问题。当压缩机的压缩比与制冷剂的流量相比较高时,发生浪涌,并且是指由于压缩机的旋转体处于空转而使制冷剂的流动变得不规则的现象。当发生这种浪涌现象时,压缩机不能产生大于系统的耐压性的压力。
4.因此,当发生浪涌现象时,存在制冷剂回流反复发生、导致压缩机频繁损坏的问题。
5.因此,为了防止由于在冷却器系统中发生的浪涌现象而损坏压缩机,旋转轴的位置被感测并且旋转轴的位置被调整。
6.间隙传感器用于检测旋转轴的位置,并且在冷却器操作期间,间隙传感器的输出值在一定距离/一定温度下不会变化,但是在温度根据操作条件的变化而变化的情况下,间隙传感器的输出值在一定距离处变化。
7.如果根据温度的变化量较小,则没有问题,但是在某些情况下,由于每个间隙传感器的差异,变化量显得较大,在这种情况下,会出现距离测量值不同并且会影响控制的问题。
技术实现要素:
8.本公开的目的是根据制冷剂的温度和压缩机的温度来准确地检测在压缩机中产生的浪涌。
9.本公开的另一目的是当压缩机中发生浪涌时迅速做出反应,以防止损坏压缩机。
10.本公开的另一目的是以较小的力和较小的电流防止发生浪涌时旋转轴在一个方向上偏心。
11.为了实现上述目的,根据本发明实施方式的压缩机的特征在于,由间隙传感器测量的距旋转轴的距离通过温度补偿传感器来校正。
12.根据本公开的一方面,上述和其它目的可以通过提供鼓风机来实现,包括根据本公开的一方面、上述和其它目的鼓风机可以通过提供压缩机来实现,该压缩机包括:一个或更多个叶轮,其吸入和压缩制冷剂;电动机,其使叶轮旋转;旋转轴,叶轮和电动机连接至该旋转轴;间隙传感器,其测量旋转轴的随着频率变化的位移变化;温度补偿传感器,其根据间隙传感器周围的温度变化确定频率补偿值;控制单元,其通过反映由温度补偿传感器提供的频率补偿值和由间隙传感器测量的频率变化来计算旋转轴的位移量。
13.根据本公开的另一方面,温度补偿传感器可以测量温度变化作为频率变化以确定频率补偿值。
14.根据本公开的另一方面,温度补偿传感器可以被设置为比间隙传感器更远离旋转轴。
15.根据本公开的另一方面,温度补偿传感器可以与旋转轴间隔开超过测量范围。
16.根据本公开的另一方面,温度补偿传感器可以具有与间隙传感器相同的构造,并且与旋转轴间隔开超过测量范围。
17.根据本公开的另一方面,所述压缩机还包括至少两个推力轴承,其限制旋转轴在轴向方向上的振动,并且控制单元基于由温度补偿传感器提供的频率补偿值和由间隙传感器测量的频率变化来确定浪涌发生条件。
18.根据本公开的另一方面,推力轴承可以包括第一推力轴承和第二推力轴承,第二推力轴承被设置为比第一推力轴承更靠近叶轮,并且旋转轴的至少一部分可以位于第一推力轴承和第二推力轴承之间。
19.根据本公开的另一方面,当满足浪涌发生条件时,控制单元可仅将电流提供至第一推力轴承和第二推力轴承中的第一推力轴承。
20.根据本公开的另一方面,当满足浪涌发生条件时,控制单元可以将提供给第一推力轴承的电流量控制为大于提供给第二推力轴承的电流量。
21.根据本公开的另一方面,旋转轴还可以包括在旋转轴的旋转径向方向上延伸的旋转轴叶片,并且旋转轴叶片可位于第一推力轴承和第二推力轴承之间。
22.根据本公开的另一方面,间隙传感器可以测量旋转轴的轴向运动。
23.根据本公开的另一方面,当由间隙传感器测量的旋转轴的位置在正常位置范围之外时,控制单元可以确定满足浪涌发生条件。
24.根据本公开的另一方面,当由间隙传感器测量的旋转轴的位置位于正常位置范围之内时,控制单元可以确定满足浪涌不发生条件。
25.根据本公开的另一方面,当满足浪涌不发生条件时,控制单元可以均等地调节提供给第一推力轴承的电流量和提供给第二推力轴承的电流量。
26.根据本公开的另一方面,温度补偿传感器可以通过测量间隙传感器周围的温度来确定频率补偿值。
27.根据本公开的另一方面,所述压缩机还可以包括至少两个推力轴承,其限制旋转轴在轴向方向上的振动,并且控制单元可基于由温度补偿传感器提供的频率补偿值和由间隙传感器测量的频率变化来确定浪涌发生条件。
28.根据本公开的另一方面,推力轴承可以包括第一推力轴承和第二推力轴承,第二推力轴承被设置为比第一推力轴承更靠近叶轮,并且旋转轴的至少一部分可以位于第一推力轴承和第二推力轴承之间。
29.根据本公开的另一方面,当满足浪涌发生条件时,控制单元可仅将电流提供给第一推力轴承和第二推力轴承中的第一推力轴承。
30.根据本公开的另一方面,当满足浪涌发生条件时,控制单元可以将提供给第一推力轴承的电流量控制为大于提供给第二推力轴承的电流量。
31.根据本公开的另一方面,当由间隙传感器测量的旋转轴的位置在正常位置范围之
外时,控制单元可以确定满足浪涌发生条件。
32.其它实施方式的细节包括在详细描述和附图中。
附图说明
33.图1是示出根据本公开的实施方式的冷却器系统的图。
34.图2是示出根据本公开的实施方式的压缩机的结构的图。
35.图3是示出根据本公开的实施方式的压缩机满足浪涌不发生条件的情况的图。
36.图4是示出根据本公开的实施方式的压缩机满足浪涌发生条件的情况的图。
37.图5是示出连接到控制单元的部件之间的关系的框图。
38.图6是示出根据本公开的实施方式的用于控制压缩机的方法的图。
具体实施方式
39.参照以下详细描述的实施方式以及附图,本公开的优点和特征以及实现它们的方法将变得显而易见。然而,本公开不限于以下公开的实施方式,而是可以以各种不同的形式来实现,仅提供这些实施方式以完成本发明并将本公开的范围完全告知本公开所属领域的普通技术人员,并且本公开仅由权利要求的范围限定。
40.如附图所示,空间相对术语“在...下方”、“在...下面”、“下部”、“在...上方”和“上部”等可用于容易地描述一个部件与其他部件之间的相关性。空间相对术语应被理解为除了附图所示的方向之外,还包括在使用或操作期间部件的各个不同方向的术语。例如,如果附图所示的部件被翻转,则被描述为在另一部件“下方”或“下面”的部件可以被设置在另一部件“上方”。因此,示例性术语“在...下方”可以包括下和上两个方向。部件可以被设置在其他方向,因此可以根据该方向解释空间上相对的术语。
41.在本说明书中使用的术语是用于描述示例性实施方式的,而无意于限制本公开。在本说明书中,除非在短语中明确说明,否则单数形式也包括复数形式。在本说明书中使用的“包括”和/或“包含”不排除所提到的部件、步骤和/或动作中存在或增加一个或更多个其他部件、步骤和/或动作。
42.除非另有定义,否则本说明书中使用的所有术语(包括技术和科学术语)可以以本公开所属领域的普通技术人员可以通常理解的含义来使用。另外,除非具体地明确定义,否则不会理想地或过度地解释在常用字典中定义的术语。
43.在附图中,为了便于描述和清楚起见,每个部件的厚度或尺寸被放大、省略或示意性地例示。此外,每个部件的尺寸和面积都不能完全反映实际的尺寸或面积。
44.在下文中,参照附图,将在下面描述本公开的优选实施方式。
45.在下文中,将参照用于描述根据本公开的实施方式的压缩机的附图来描述本公开。
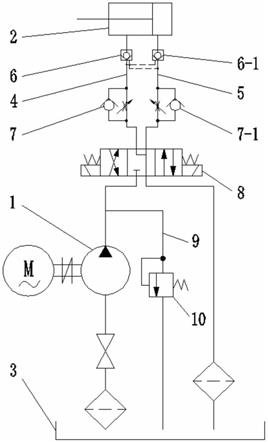
46.图1是示出具有本公开的压缩机100的冷却器系统的图。此外,根据本公开的实施方式的压缩机100不仅用作冷却器系统的一部分,而且可以被包括在空调中,并且压缩机100可以被包括在用于压缩气态物质的任何装置中。
47.参照图1,根据本发明的实施方式的冷却器系统1包括:压缩机100,被形成为压缩制冷剂;冷凝器200,用于通过在压缩机100中压缩的制冷剂与冷却水之间的热交换来冷凝
制冷剂;膨胀器300,使在冷凝器200中冷凝的制冷剂膨胀;以及蒸发器400,被形成为通过在膨胀器300中膨胀的制冷剂和冷水之间的热交换来冷却冷水并蒸发制冷剂。
48.另外,根据本发明的实施方式的冷却器系统1还包括:冷却水单元600,其通过在冷凝器200中冷凝的制冷剂与冷却水之间的热交换来加热冷却水;以及空调单元500,其通过在蒸发器400中膨胀的制冷剂与冷水之间的热交换来冷却冷水。
49.冷凝器200提供了在由压缩机100压缩的高压制冷剂与从冷却水单元600引入的冷却水之间进行热交换的场所。高压制冷剂通过与冷却水进行热交换而冷凝。
50.冷凝器200可以被构造为壳管式热交换器。具体地,由压缩机100压缩的高压制冷剂通过冷凝器连接通道150被引入到与冷凝器200的内部空间相对应的冷凝空间230中。另外,冷凝空间230包括冷却水通道210,通过该冷却水通道210从冷却水单元600引入的冷却水可以流动。
51.冷却水通道210由冷却水入口通道211和冷却水排出通道212组成,冷却水从冷却水单元600引入冷却水入口通道211,冷却水通过冷却水排出通道212被排放到冷却水单元600。冷却水在冷凝空间230中与制冷剂热交换,然后通过设置在冷凝器200内部或外部的冷却水连接通道引入冷却水排出通道212。
52.冷却水单元600和冷凝器200经由冷却水管220连接。冷却水管220可以由诸如橡胶之类的材料形成,使得冷却水也在冷却水单元600和冷凝器200之间流动。以防止泄漏到外部。
53.冷却水管220由连接至冷却水入口通道211的冷却水入口管221和连接至冷却水排出通道212的冷却水排出管222组成。从整体上观察冷却水的流动,在冷却水单元600中与空气或液体完成了热交换的冷却水通过冷却水入口管221流入冷凝器200。被引入冷凝器200的冷却水穿过依次设置在冷凝器200中的冷却水入口通道211、冷却水连接通道240以及冷却水排出通道212,与引入冷凝器200中的制冷剂进行热交换,然后穿过冷却水排出管222,并被再次引入冷却水单元600再次。
54.此外,通过冷凝器200中的热交换吸收制冷剂的热量的冷却水可以在冷却水单元600中被空气冷却。冷却水单元600由主体630、冷却水入口管道610和冷却水排出管道620组成。冷却水入口管道610是通过冷却水排出管222引入吸收热量的冷却水的入口,并且冷却水排出管道620是冷却水在冷却水单元600内部被冷却后通过其排出的出口。
55.冷却水单元600可以使用空气来冷却引入到主体630中的冷却水。具体地,主体630由出气口631和进气口632组成,出气口631设置有用于产生气流的风扇,空气通过进气口632被引入到主体630中。
56.在空气排出口631进行热交换之后排出的空气可以用于加热。在冷凝器200中进行了热交换的制冷剂在冷凝空间230中冷凝并累积。在将累积的制冷剂引入到设置冷凝空间230中的制冷剂箱250中之后,将其引入膨胀器300。
57.累积的制冷剂被引入到制冷剂入口251中,并且引入的制冷剂被排放到蒸发器连接通道260中。蒸发器连接通道260包括蒸发器连接通道入口261,并且蒸发器连接通道入口261可以位于制冷剂箱250的下部。
58.蒸发器400包括蒸发空间430,在该蒸发空间中,在膨胀器300中膨胀的制冷剂与冷水之间发生热交换。已经穿过蒸发器连接通道260中的膨胀器300的制冷剂被引入到设置在
蒸发器400中的制冷剂注入装置450中,穿过设置在制冷剂注入装置450中的制冷剂注入孔451,并且均匀地扩散到蒸发器400中。
59.另外,在蒸发器400的内部设置有冷水通道410,并且冷水通道410包括:冷水进入通道411,通过其将冷水引入到蒸发器400中;以及冷水排出通道412,通过其将冷水排放到蒸发器400的外部。
60.通过与设置在蒸发器400外部的空调单元500连通的冷水管420引入或排出冷水。冷水管420由冷水进入管421和冷水排出管422组成,冷水进入管421是空调单元500中的冷水通过的通道,而冷水排出管422是在蒸发器400中进行了热交换的冷水通过其排放到空调单元500的通道。也就是说冷水进入管421与冷水入口通道411连通,并且冷水排出管422与冷水出口通道412连通。
61.观察冷水的流动,冷水穿过空调单元500、冷水入口管421和冷水入口通道411,并穿过蒸发器400的内端或设置在蒸发器400之后的冷水连接通道440,并再次通过冷水排出通道412和冷水排出管422引入到空调单元500中。
62.空调单元500通过制冷剂冷却冷水。冷却的冷水吸收空调单元500中的空气的热量以允许室内冷却。空调单元500包括与冷水进入管421连通的冷水排出管520和与冷水排出管422连通的冷水进入管510。已在蒸发器400中完成热交换的制冷剂通过压缩机连接通道460被再次引入到压缩机100。
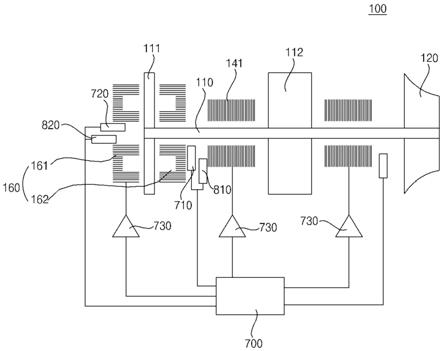
63.图2是示出根据本发明的实施方式的离心式压缩机100(又称为涡轮压缩机)的图。
64.根据图2的压缩机100包括:至少一个沿轴向方向ax吸入制冷剂并在离心方向上压缩制冷剂的叶轮120;叶轮120和使叶轮120旋转的电动机130连接到的旋转轴110;以及使叶轮120旋转的电动机130;轴承单元140,其包括使其能够在空中旋转的多个磁性轴承141和支撑磁性轴承141的轴承壳体142;感测与旋转轴110的距离的间隙传感器70;以及限制旋转轴110沿轴向方向ax振动的推力轴承160。
65.另外,压缩机100还可包括温度补偿传感器80。
66.叶轮120通常由一级或两级组成,并且可以由多级组成。叶轮120通过旋转轴110旋转,并且通过沿离心方向旋转来压缩沿轴向方向ax引入的制冷剂,从而使制冷剂高压。
67.电动机130可以具有与旋转轴110不同的单独的旋转轴,并且可以具有通过皮带(未示出)将旋转力传递到旋转轴110的结构,但是在本公开的实施方式的情况下,电动机130由定子(未示出)和转子112组成,并且使旋转轴110旋转。
68.旋转轴110连接至叶轮120和电动机13。旋转轴110在图2的左右方向上延伸。在下文中,旋转轴110的轴向方向ax是指左右方向。优选地,旋转轴110包括金属,以能够通过磁性轴承141和推力轴承160的磁力运动。
69.为了防止推力轴承160在轴向方向ax(左右方向)上产生振动,优选地,旋转轴110在与轴向方向ax垂直的平面上具有一定面积。具体地,旋转轴110可以进一步包括旋转轴叶片111,该旋转轴叶片111提供足够的磁力以通过推力轴承160的磁力来使旋转轴110运动。旋转轴叶片111可以具有大于旋转轴110在垂直于轴向方向ax的平面中的横截面积的面积。旋转轴叶片111可以形成为在旋转轴110的旋转径向上延伸。
70.磁性轴承141和推力轴承160由导体组成,并在其上缠绕有线圈143。磁性轴承141和推力轴承160通过流过缠绕在其上的线圈143的电流而用作磁体。
71.磁性轴承141设置有多个磁性轴承141,这些磁性轴承141以旋转轴110为中心围绕旋转轴110,并且推力轴承160被设置为与设置为在旋转轴110的旋转径向方向上延伸的旋转轴叶片111相邻。
72.磁性轴承141在旋转轴110漂浮在空气中的状态下使旋转轴110无摩擦地旋转。为此,至少三个磁性轴承141应设置有作为中心的旋转轴110,并且每个磁性轴承141应安装成以旋转轴110为中心平衡。
73.在本公开的实施方式的情况下,四个磁性轴承141被设置为关于旋转轴110对称,旋转轴110通过缠绕在每个磁性轴承141上的线圈产生的磁力而漂浮在空气中。与具有轴承的传统公开不同,当旋转轴110漂浮在空中并旋转时,减少了由于摩擦而损失的能量。
74.此外,压缩机100可以进一步包括支撑磁性轴承141的轴承壳体142。多个磁性轴承141被设置并安装有间隙,从而不与旋转轴110接触。
75.多个磁性轴承141安装在旋转轴110的至少两个点。这两个点对应于沿着旋转轴110的长度方向的不同点。由于旋转轴110对应于直线,因此通过在两个点处支撑旋转轴110,可以防止在圆周方向上的振动。
76.观察制冷剂流,通过压缩机连接通道460引入压缩机100的制冷剂在叶轮120的作用下在圆周方向压缩,然后排放到冷凝器连接通道150。压缩机连接通道460连接到冷凝器连接通道150,从而沿垂直于叶轮120的旋转方向的方向引入制冷剂。
77.推力轴承160由于轴向方向ax上的振动而限制旋转轴110的运动,并且在发生浪涌时在沿叶轮120的方向运动的同时,防止旋转轴110与压缩机100的其他部件碰撞。
78.具体地,推力轴承160由第一推力轴承161和第二推力轴承162组成,并且被设置为在旋转轴110的轴向方向ax上围绕旋转轴叶片111。也就是说,在旋转轴110的轴向方向ax上,第一推力轴承161、旋转轴叶片111和第二推力轴承162依次设置。
79.更具体地,第二推力轴承162比第一推力轴承161更靠近叶轮120,第一推力轴承161比第二推力轴承162更远离叶轮120,并且旋转轴的至少一部分110位于第一推力轴承161和第二推力轴承162之间。优选地,旋转轴叶片111位于第一推力轴承161和第二推力轴承162之间。
80.因此,第一推力轴承161和第二推力轴承162具有使由于大面积的旋转轴叶片111和磁力的作用而引起的旋转轴110在旋转轴110方向上的振动最小化的效果。
81.间隙传感器70测量旋转轴110在轴向方向ax(左右方向)上的运动。当然,间隙传感器70可以测量旋转轴110在上下方向(与轴向方向ax正交的方向)上的运动。另外,间隙传感器70测量到旋转轴110的距离。当然,间隙传感器70可以包括多个间隙传感器70。
82.例如,间隙传感器70由测量旋转轴110的垂直运动的第一间隙传感器710和测量旋转轴110的水平运动的第二间隙传感器720组成。第二间隙传感器720可以被设置为在轴向方向ax上与旋转轴110的一端间隔开。
83.间隙传感器70测量旋转轴110的随着频率变化的位移变化,并且控制单元700可以通过测量的频率变化来检测旋转轴110的位移变化量。也就是说,间隙传感器70可包括通过频率变化来测量距离变化的涡流间隙位移传感器。
84.推力轴承160的力与距离的平方成反比,并且与电流的平方成正比。当在旋转轴110中发生浪涌时,在叶轮120的方向(右方向)上产生推力。应使用推力轴承160的磁力以最
大的力拉动在右方向产生的力,但是当旋转轴110的位置位于两个推力轴承160的中间时(基准位置c0),响应于快速轴运动,难以将旋转轴110快速地运动至基准位置c0。
85.由于在旋转轴110上产生的沿叶轮120的方向的推力相当大,因此当旋转轴110位于基准位置c0时,存在为了增大推力轴承160的磁力、必须增大所供给的电流量或推力轴承160的尺寸的问题。
86.在本公开中,为了解决上述问题,当预期到浪涌时,旋转轴110在与产生推力的方向相反的方向上偏心设置。
87.为了准确地预测浪涌的发生,必须准确地检测出旋转轴110的位置。然而,间隙传感器70的输出值取决于冷却器的工作条件、制冷剂的温度以及间隙传感器70周围的温度而在一定距离处变化。
88.因此,根据本公开,当间隙传感器70的输出值根据温度变化时,可以通过根据温度进行适当的补偿来精确地测量旋转轴110的位置。
89.具体地,温度补偿传感器80根据间隙传感器70周围的温度变化来确定由间隙传感器70检测到的频率补偿值t。
90.例如,温度补偿传感器80可以通过测量温度变化作为频率变化来确定频率补偿值t。具体地,温度补偿传感器80具有与间隙传感器70相同的构造,并且可以与旋转轴110间隔开超出测量范围。
91.温度补偿传感器80可以使用与间隙传感器70相同的方式通过频率变化而测量距离变化的涡流间隙位移传感器。当温度补偿传感器80具有与间隙传感器70相同的构造时,优点是,即使存在针对各个类型的间隙传感器70发生根据温度变化的频率变化值的差异,也不必为各个类型的间隙传感器70提供单独的表数据。也就是说,温度补偿传感器80具有与间隙传感器70相同的构造,不需要补偿表来确定频率补偿值t。
92.当温度补偿传感器80具有与间隙传感器70相同的构造时,温度补偿传感器80的位置很重要。温度补偿传感器80被设置为比间隙传感器70更远离旋转轴110。更具体地,温度补偿传感器80可以与旋转轴110间隔开超出测量范围。温度补偿传感器80的测量范围可以是2mm至5mm。
93.另外,温度补偿传感器80设置有与间隙传感器70相同的数量,并且可以与每个间隙传感器70成对设置。温度补偿传感器80可以被设置为与成对的间隙传感器70面向相同的方向。
94.具体地,温度补偿传感器80可以包括:第一温度补偿传感器810,其被设置为与测量旋转轴110的上下方向运动的第一间隙传感器710面向相同的方向,并位于与第一间隙传感器710相邻的位置;以及第二温度补偿传感器820,其被设置为与测量旋转轴110的左右方向运动的第二间隙传感器720面向相同的方向,并位于与第二间隙传感器720相邻的位置。
95.更具体地,第一温度补偿传感器810可以与旋转轴110间隔开比第一间隙传感器710的测量范围更远的距离。
96.第一温度补偿传感器810可以设置在与第一间隙传感器710相比离旋转轴110更远的位置。
97.第二温度补偿传感器820可以与旋转轴110间隔开比第二间隙传感器720的测量范围更远的距离。第二温度补偿传感器820可以设置在与第二间隙传感器720相比离旋转轴
110更远的位置。
98.在下文中,将详细描述温度补偿传感器80的操作。
99.温度补偿传感器80是与旋转轴110的距离测量无关地进行操作的传感器,并且通过使用输出频率值将根据温度的差发送给间隙传感器70作为信息来补偿间隙传感器70的距离误差。
100.温度补偿传感器80将初始频率值和根据温度而变化的频率值之间的差确定为频率补偿值t。由于温度补偿传感器80位于测量范围之外,所以无论实际距离的变化如何,频率都根据温度变化而变化。
101.使用从温度补偿传感器80输出的频率补偿值t来计算距离的方法如下等式1所示。
[0102][0103]
这里,
[0104]
‑
refclk:表示为微型计算机可读值的频率值(常量)。
[0105]
‑
input:从间隙传感器70输出的频率值(变量)
[0106]
‑
t:根据温度的频率补偿值t(存储在存储器中的值
‑
根据温度的频率变化值)
[0107]
‑
c:间隙传感器(70)温度恒量
[0108]
‑
gain/offset:间隙传感器(70)的增益和偏移
[0109]
控制单元700通过反映由温度补偿传感器80提供的频率补偿值t来计算旋转轴110与间隙传感器70之间的距离。
[0110]
作为另一示例,温度补偿传感器80可以通过测量间隙传感器70周围的温度来确定频率补偿值t。例如,温度补偿传感器80可以由测量间隙传感器(未示出)周围的温度的温度传感器和存储根据测量的温度的频率补偿值t的表的存储器来实现。
[0111]
控制单元700通过反映由温度补偿传感器80提供的频率补偿值t和由间隙传感器70测量的频率变化来计算与旋转轴110相对的位移变化量。
[0112]
具体地,控制单元700基于从间隙传感器70接收的信息和温度补偿传感器80的频率补偿值t来确定浪涌发生条件。控制单元700基于温度补偿传感器80提供的频率补偿值t和间隙传感器70测量的频率变化来确定浪涌发生条件。
[0113]
当由间隙传感器70测量的旋转轴110的位置在正常位置范围之外时,控制单元700可以确定满足浪涌发生条件。另外,当由间隙传感器70测量的旋转轴110的位置位于正常位置范围之内时,控制单元700可以确定满足浪涌不发生条件。
[0114]
这里,旋转轴110的正常位置范围是指基于旋转轴110的基准位置c0在左右方向上的预定距离内的区域。当旋转轴110旋转时,旋转轴110由于各种环境和周围因素而在轴向方向ax上振动,并且旋转轴110的正常位置范围素而在轴向方向ax上振动,并且旋转轴110的正常位置范围是确定这种振动处于正常状态的范围。该正常位置范围是实验值,并且可以基于旋转轴110的位置的峰度或偏度来确定正常位置范围对于如何设置正常位置范围没有限制。
[0115]
如果满足浪涌发生条件,则控制单元700可以调节提供给推力轴承160的电流量,以使旋转轴110从基准位置c0向与叶轮120相反的方向偏心。旋转轴110偏心的位置是指旋
转轴叶片111位于第一推力轴承161与基准位置c0之间。
[0116]
因此,由于此后发生浪涌,旋转轴110可以具有向叶轮120的方向快速运动的缓冲时间,并且由于电流量的增加,使控制旋转轴110到达正常位置范围变得容易。
[0117]
具体地,当满足浪涌发生条件时,控制单元700可以仅向第一推力轴承161和第二推力轴承162提供电流。作为另一示例,当满足浪涌发生条件时,控制单元700可以将提供给第一推力轴承161的电流量调节为大于提供给第二推力轴承162的电流量。
[0118]
当满足浪涌发生条件时,控制单元700可以控制旋转轴110在叶轮120的相反方向上偏心,然后控制旋转轴110的位置在一定时间内固定到偏心位置。也就是说,当在旋转轴110在叶轮120的相反方向上偏心之后发生浪涌时,控制单元700可以增大提供给第一推力轴承161的电流量。当旋转轴110在与叶轮120相反的方向上偏心,并且基于偏心位置将振动宽度维持在一定标准以下时,控制单元700可以使旋转轴110运动回基准位置c0。
[0119]
当满足浪涌不发生条件时,控制单元700可以均等地调节提供给第一推力轴承161的电流量和提供给第二推力轴承162的电流量。或者满足浪涌不发生条件时,控制单元700可通过调节提供给第一推力轴承161和第二推力轴承162的电流量来控制旋转轴110位于基准位置c0处。
[0120]
图5是示出控制单元700的操作的框图。控制单元700控制施加到间隙传感器70、磁性轴承141和推力轴承160的电流的幅度。
[0121]
通过控制功率放大器730,可以调节施加到磁性轴承141的电流的幅度,并且可以通过使用间隙传感器70根据电流的幅度的变化来掌握旋转轴110的位置的变化。
[0122]
由间隙传感器70测量的值被存储在存储单元740中。诸如基准位置c0、正常位置范围和偏心位置之类的数据可以被预先存储在存储单元740中。当将来确定浪涌发生条件时,可以通过将测量值与存储在存储单元740中的值彼此比较来确定是否符合浪涌发生条件。
[0123]
温度补偿传感器80根据间隙传感器70周围的温度变化来确定频率补偿值t。
[0124]
此外,根据本公开的实施方式,提供了压缩机100的控制方法。图6是示出控制方法的步骤的图,该控制方法示出了本公开的实施方式。
[0125]
本公开的压缩机100的控制方法可以包括以下步骤:步骤(a),测量间隙传感器70与旋转轴110之间的距离;步骤(a
‑
1),根据温度变化校正距离值;步骤(b),基于间隙传感器70与旋转轴110之间的距离确定浪涌发生条件;以及步骤(c),调整提供给推力轴承160的电流量以设置旋转轴110从基准位置c0向与叶轮120相反的方向偏心。
[0126]
另外,当满足浪涌不发生条件时,本公开可以进一步包括:步骤(d),通过调节提供给推力轴承160的电流量,将旋转轴110设置在基准位置c0。
[0127]
具体地,步骤(a),测量旋转轴110与间隙传感器70之间的距离(s10)。另外,由间隙传感器70测量的数据被存储在控制单元700中(s20)。具体地,可以将其存储在连接至控制单元700的存储单元740中。
[0128]
步骤(a
‑
1),根据温度变化校正旋转轴110与间隙传感器70之间的测量距离值(s15)。如上所述,利用温度补偿传感器80的频率补偿值t来执行根据温度变化对旋转轴110与间隙传感器70之间的测量距离值进行校正的操作。另外,将旋转轴110与间隙传感器70之间的校正后的距离值存储在控制单元700中(s20)。
[0129]
此后,基于间隙传感器70和旋转轴110之间的校正距离来确定浪涌发生条件(s50)。浪涌发生条件如上所述。具体地,控制单元700将存储在存储单元740中的数据与间隙传感器70的测量值进行比较,以确定电涌发生条件或电涌不发生条件。
[0130]
当满足浪涌发生条件时,控制单元700调节提供给推力轴承160的电流量,以使旋转轴110从基准位置c0向与叶轮120相反的方向偏心(s60)。具体地,控制单元700可以将提供给两个推力轴承160中相对远离叶轮120的轴承的电流量调节为大于提供给靠近叶轮120的轴承的电流量。更具体地,当满足浪涌发生条件时,控制单元700可以仅向第一推力轴承161和第二推力轴承162中的第一推力轴承161提供电流。
[0131]
当满足浪涌发生条件时,控制单元700可以通过调节提供给推力轴承160的电流量来将旋转轴110设置在基准位置c0处(s70)。具体地,当旋转轴110从基准位置c0向左方偏心时,控制单元700增大提供给第二推力轴承162的电流量,并且当旋转轴110从基准位置c0向右偏心时,控制单元700增大提供给第一推力轴承161的电流量。
[0132]
根据本公开的压缩机及其方法具有以下效果。
[0133]
根据本公开的实施方式中的至少一个,该压缩机能够准确地测量旋转轴的位置,而与冷却器的操作状态、间隙传感器周围的温度状态以及间隙传感器的类型无关。
[0134]
根据本公开的实施方式中的至少一个,可以防止浪涌和对压缩机的损坏。
[0135]
根据本发明的实施方式中的至少一个,由于通过预先预测浪涌现象的发生来调节旋转轴的位置,因此,当发生浪涌时,可以迅速防止旋转轴在叶轮方向上偏心。
[0136]
根据本发明的实施方式中的至少一个,通过在浪涌发生之前预先使旋转轴的位置运动,与发生浪涌时处于基准位置时相比,可以用较小的力来防止压缩机的损坏,从而减小推力轴承的体积,并减少电流量。
[0137]
本公开的效果不限于上述效果,并且本领域技术人员将从权利要求的描述中清楚地理解未提及的其他效果。
[0138]
在上文中,已经例示和描述了本公开的优选实施方式,但是本公开不限于上述特定实施方式,当然,在不脱离权利要求书要求保护的本公开的主旨的情况下,本发明所属技术领域的普通技术人员可以实现各种修改,并且不应从本公开的技术精神或角度来单独理解这些修改的实施方式。
[0139]
相关申请的交叉引用
[0140]
本技术要求于2020年3月27日在韩国知识产权局提交的韩国专利申请no.10
‑
2020
‑
0037529的优先权,其公开内容通过引用合并于此。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。